液压支架电液控制系统在成庄矿的研究应用
2021-08-09王少璞
王少璞 张 强
(山西晋煤集团技术研究院有限责任公司,山西 晋城 048006)
1 引言
成庄煤矿151307工作面采高2.4~4.5 m,支撑掩护式,工作面长为200 m,工作面走向为1800 m,平均采高约3.6 m,支架为4立柱支架,安装115个支架,机头机尾各3个架,2个过渡架,即机头机尾共10个架,中间架105个,排头架为6柱式支架。本文在对现场调研和矿方需求分析的基础上,设计了一套工作面电液控制系统。
2 工作面电液控制系统总体结构
成庄煤矿151307工作面电液控制系统的设计方案如图1,由支架就地控制、端头集中控制、顺槽监控和地面调度四级网络构成。
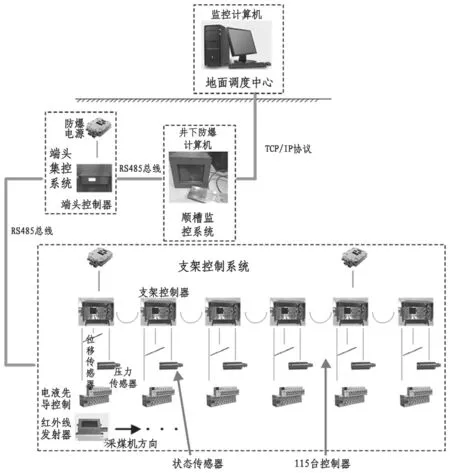
图1 电液控制系统的总体结构
3 工作面电液控制系统各子系统结构
3.1 支架控制系统
支架控制系统是整个系统的最底层,主要负责现场数据采集,并将采集的数据进行分析处理,同时向支架发送相应的动作命令。
3.1.1 硬件设计
支架控制器系统组成如图2。由各种传感器、控制电路、RS485和SPI接口电路等组成[1]。
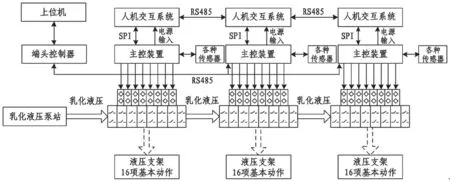
图2 支架控制器功能结构图
3.1.2 实现功能
(1)就地控制模式
就地控制模式是煤矿综采工作面的支架操作工通过控制器自带的键盘直接输入控制命令,控制邻近液压支架的各种动作,包括邻架控制功能、参数设定功能、信号检测功能、自动排序功能、人机交互功能以及控制模式切换功能等。
邻架控制功能是支架控制的操作邻近液压支架的动作,分为邻架单动作控制、邻架组合控制、成组推镏控制等。邻架单动作控制是一次操作只操作控制液压支架的一个动作;邻架组合控制用于同时控制一台液压支架的两个动作。成庄矿在进行支护操作时,要对前立柱和后立柱同时升降,所以升前柱和升后柱、降前柱和降后柱控制要组合起来一起进行控制。在拉架时,为减小支架移动时与底板的磨擦力,先要进行提底动作,再进行拉架动作,所以提底和拉架两个动作要能组合控制。实际操作中,有三种组合动作,升前柱和升后柱、降前柱和降后柱以及提底和拉架动作。成组推镏动作是控制多台液压支架来推出刮板输送机。
(2)自动排序
自动排序是控制器实现有序控制的前提。采用架间通讯进行支架编号能自动排序,可在两个方向实现排序,工作面支架控制器号全部初始化为1,通过机头或机尾支架进行全工作面自动排序,也能进行局部排序。
(3)远程控制模式
在远程模式下响应端头控制器发来的控制命令,工作面的支架接收到命令后执行各种动作。同时响应端头控制器的巡检命令,将各种位移传感器、压力传感器实时采集的数据以及支架运行状态信息等上传至端头控制器。
3.2 端头集控系统
端头集控系统是整个系统的中枢环节,其核心装置是端头控制器,它一方面和支架控制系统相连,向支架控制器下传设置的参数,巡检支架控制器获取整个工作面液压支架运行状态参数;另一方面与顺槽监控系统相连,接收防爆计算机的定时询问指令,将巡检到的支架运行状态参数上传至防爆计算机。
3.2.1 硬件设计
端头控制器采用先进的微处理器为控制核心,其总体结构如图3,主要由RS485通讯电路、控制电源单元、显示电路等组成[2]。
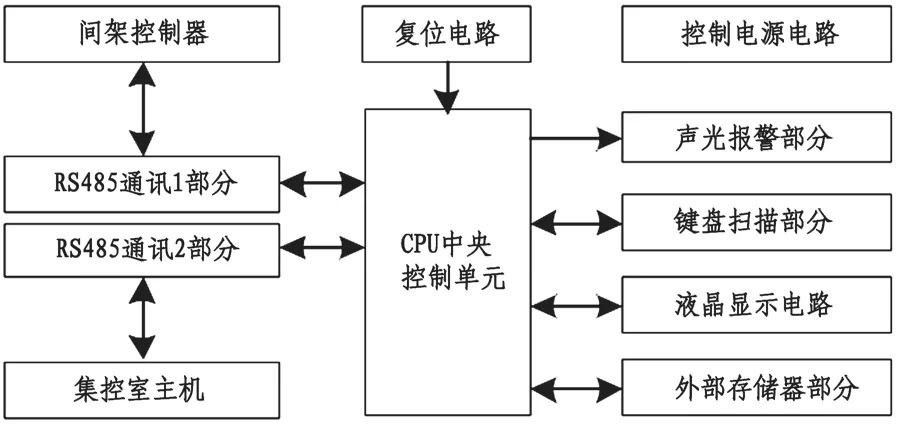
图3 总体结构图
3.2.2 实现功能
(1)集中手动控制
集中手动控制主要是在端头控制器上集中控制液压支架的各种动作。端头控制器发送指令,同时支架控制器会向端头控制器回馈信息,若接到的返回信息不正确,则端头控制器会重新发送一次命令,若连续两次均接不到正确的返回信息,则进行报警。
(2)控制权限切换功能
支架控制器可接收来自邻架控制命令、集中手动控制命令和集中控制追机拉架命令,这三个层面的控制不能同时进行,为保证安全生产,需进行可靠的切换,切换命令由端头控制器发出。三个层面的控制手动为最高优先级,其他两个层次的控制命令均由端头控制器发出,优先级相同。
3.3 顺槽监控系统
顺槽监控系统是整个系统的第三层,其核心装置是防爆计算机,它安装在顺槽设备列车中,实现实时监测和集中控制功能。
3.3.1 硬件设计
该系统由工控机、供电系统及RS485、USB隔离电路等组成,其总体结构如图4[3]。
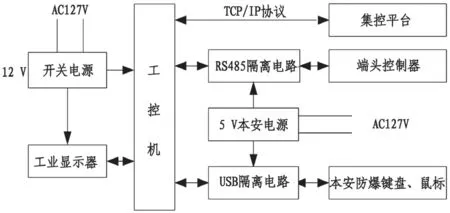
图4 防爆计算机结构图
3.3.2 实现功能
(1)远程控制功能
远程控制功能是通过安装在顺槽设备列车中的防爆计算机给端头控制器发送动作指令,再通过端头控制器给支架控制器发送指令,控制支架执行各种动作。
(2)远程巡检功能
远程巡检功能是防爆计算机每隔3 s向端头控制器发送巡检指令,通过端头控制器返回的各种数据,实现支架运行状态的监测。
(3)远程与上级平台的TCP/IP通讯功能
防爆计算机可通过TCP/IP协议的网络通讯与地面调度中心进行实时通讯,接收来自上一级平台的命令,向地面调度中心传送液压支架的运行数据[4]。
3.4 地面调度中心
地面调度中心是整个系统的最高层,其核心装置是工业计算机,它安装在地面调度中心,实时监测支架的运行状态,同时能根据用户的要求对井下工作面运行状态进行智能化分析和故障诊断[5]。工业计算机可通过煤矿环网与防爆计算机进行实时通讯,接收井下现场的实时数据,生成各类图形及曲线,直观地显示井下的生产情况。
3.5 反冲过滤站状态监控
反冲过滤站用一个支架控制器完成工作状态实时监测,与其他支架控制器的通讯模式一样,将数据发送给上一级,由顺槽监控系统进行分析,将分析结果再传送到地面调度中心进行显示。
4 结 语
针对成庄矿15037工作面液压支架需求,本文设计了电液控制系统的总体结构,同时对其四级网络结构的原理和实现功能进行阐述,最后以控制20台支架为前提搭建了液压支架控制试验台来模拟控制系统的部分功能,操作简单,系统运行稳定。
