自动驾驶环境下考虑停车需求的交通均衡模型*
2021-08-09刘诗序贺朝阳关宏志王智煜朱建超
刘诗序,贺朝阳,关宏志,王智煜,朱建超
(1.福州大学 土木工程学院,福建 福州 350108;2.北京工业大学 建筑工程学院,北京 100124)
近年来,世界各国纷纷投入人力物力开发AVs技术。由于AVs可以以一个很小的车头间距跟车行驶,使得AVs行驶的道路通行能力大大增加,从而缓解交通拥堵、提升路网整体的运输效率,小的车头间距还可以减少空气阻力以提高燃油效率[1-4]。另外,AVs不需要人工干预即可完成日常出行,这意味着出行者可以在AVs中从事其他活动,例如进餐、休息等,也为弱势群体的自主出行提供很大的便利[5]。
在AVs环境下,网络交通流将如何分布,是交通研究者所关注的问题,人们通常基于交通均衡理论来研究此类问题。在交通均衡分配研究领域,用户均衡(user equilibrium, UE)原则认为每个出行者在做路径选择时都将自己的出行成本降至最低,并且不存在出行者能够单方面改变路径降低其成本。由于AVs能够获取有关交通状况的准确信息,可以基于UE原则分析自动驾驶环境下的网络均衡流量。对于AVs交通模式,学者们从不同的角度进行了分析。
MEHR等[6]建立了AVs与普通车辆混行的变分不等式均衡模型,证明了网络均衡状态不是唯一的。WANG[7]和BAHRAMI[8]也研究了AVs与普通车辆混行的均衡问题,结果表明,随着AVs市场渗透率的增大,总出行时间变小。但是,上述研究都没有考虑空载AVs的停车选择过程,而AVs的停车选择过程会产生额外的交通需求,因此会影响网络的均衡状态。普通人工驾驶车辆的很多研究考虑了停车选择,而有关于AVs的研究极少。LIU[9]首次对通勤者乘坐AVs出发时间和停车位置选择的联合均衡进行建模,ZHANG[10]在AVs停车位置基础上综合研究了早晚通勤模式,他们研究的是共享AVs出行[9-10]。同时也有以私人AVs为研究对象,比如LEVIN[11]研究了包括AVs在内的三种交通方式的停车选择问题,结果表明停车费对均衡结果有影响,但他的试验中AVs只能回家停车,且均衡解不唯一。ZHANG等[12]研究了AVs的网络中停车费和停车场容量的变化对网络均衡的影响,但他假设出行者首先进行停车场选择,其建模思路与出行者的选择过程不符。
综上所述,现有研究存在以下问题:1)目前已有考虑停车选择的AVs均衡问题,其选择过程不符合实际;2)此类均衡问题建立变分不等式模型的解不一定唯一,不利于分析交通政策(如停车费)对网络性能的影响。另外,SOTEROPOULOS[13]指出在可预见的未来,实现私人拥有的AVs普及是可能的。所以本文以私人AVs为研究对象,由此建立相应的数学规划模型,以得到唯一的均衡状态,有利于分析停车费等政策对出行成本和路段流量的影响。
1 路径选择过程分析
在考虑停车场选择时,路网中AVs与普通车辆的路径选择过程不同。驾驶普通车辆的出行者路径选择过程如图1,可总结为:离开出发地→到达停车场→出行者步行至目的地。由于AVs具有自动驾驶功能,对应的出行过程为:离开出发地→到达目的地并放下出行者→自动驾驶找到停车位,如图2。因此AVs的路径选择可以分为两个阶段:第一个阶段是出行者乘坐AVs到达目的地,第二个阶段是空载AVs自动选择停车场。与普通车辆相比,AVs交通模式有三个特点:不需要花费时间寻找停车场;停车位置可以选择远离市中心的区域;消除了从停车场到工作地点的步行时间[7]。第一阶段中,出行者乘坐AVs去往目的地,此阶段出行者主要根据行驶时间来选择路径,而在第二阶段,出行者不在车内,AVs只需要寻找到车位停车即可,此阶段路径选择的主要依据为燃料消耗和停车费。从网络整体来看,路段行驶时间同时受到载人和空载AVs流量的影响。
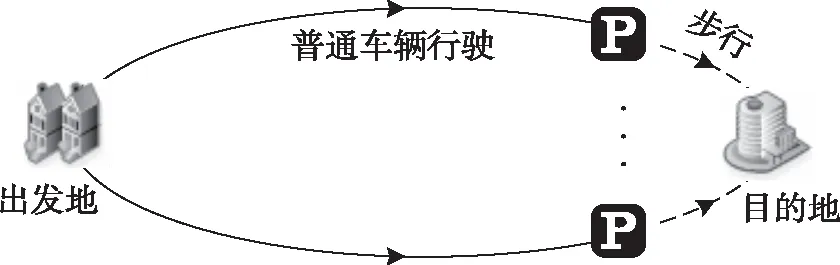
图1 普通车辆路径选择过程

图2 AVs路径选择过程
根据效用最大化原则,在第一个阶段,AVs将选择行程时间最短的路径;在第二个阶段,AVs选择出行成本最小的停车场,出行成本包括AVs去往停车场所消耗的燃油费和停车场的收费。因为自动驾驶车辆可以获得完全路网信息,所以本文假设路网可以达到确定性的用户均衡。
基于以上分析,本文对AVs的出行全过程建模。需要说明的是,供AVs选择的停车场包括公共停车场和私人停车场(如出行者家中的停车场)两类。
2 自动驾驶环境下的交通均衡条件
2.1 出行成本
考虑交通网络G=(N,P,A),其中N表示网络中的节点集合(不含停车场),P表示网络中的停车场集合,包括家庭私人停车场和公共停车场,A表示网络中路段的集合。用R表示网络中所有出发地的集合,S表示网络中所有目的地的集合,Krs表示从出发地r∈R到目的地s∈S之间的所有路径的集合,Lsp表示从目的地s∈S到停车场p∈P之间的所有路径的集合。需要特别说明的是,在实际问题中,起始节点集合、目的地集合和停车场集合可能存在交集,即同一节点既可能是起始节点,也可能是目的地节点,还可能是停车场。
假定路段a∈A上的路段行驶时间(行驶成本)函数是这两种车流量的单调递增函数,即,
ti,a=ti,a(xi,a,xi′,a)
(1)
式中:ti,a表示AVs在路段a上的路段行驶时间函数;i=1,i′=2时表示载人AVs;i=2,i′=1时表示空载AVs。
那么,第一阶段中载人AVs出行成本可表示为,
(2)

在第二个阶段中,通常出行时间的增加意味着出行距离的增加或车速的降低,这可能导致更高的能源消耗成本,因此,油耗可以表示为,
g2,a(x2,a,x1,a)=G(t2,a(x2,a,x1,a))
(3)
式中:g2,a(x2,a,x1,a)表示空载AVs路段行驶油耗成本,是路段行驶时间的单调递增函数[9]。
将路段行驶油耗转换为行驶时间,
h2,a(x2,a,x1,a)=α·g2,a(x2,a,x1,a)
(4)
式中:h2,a(x2,a,x1,a)表示路段a上的空载AVs转化为时间单位的油耗;α为油耗与时间之间的转换系数。
第二阶段中空载AVs行驶成本可表示为,
(5)

第二阶段的出行成本还要考虑停车费,本文将停车场分为家庭停车场和公共停车场。家庭停车场的停车费与出行者的出发地有关,如果某一出发地有家庭停车场,那么对于从该节点出发的出行者,停车费为0,而对于其他节点的出行者,不能在这里停车,他们的停车费为无穷大。公共停车场的停车费假设为固定值。停车成本可表示为,
Cr,p=β·cr,p
(6)
式中:Cr,p表示从出发地r出发的AVs选择停车场p的停车成本;cr,p表示从出发地r出发的AVs选择停车场p的停车费;β为停车费与时间之间的转换系数。需要说明的是,(5)式的空载AVs行驶成本与车辆从哪里出发无关,但(6)式的停车费用与起点有关,为了统一表达和建模方便,式(5)也考虑了起点。
2.2 均衡条件
根据图2的AVs的出行过程分析可知,出行选择的两个阶段都应达到均衡。
对于第一阶段的路径选择,载人AVs选择从出发地到目的地的路径使得出行成本最小,在这种情况下,没有人可以通过单方面更改路径来进一步减少个人出行成本。均衡条件为,
(7)

对于第二阶段的停车场选择,空载AVs从目的地出发选择路径行驶油耗与停车费之和最小的路径和停车场。在这种情况下,没有AVs可以通过单方面更改停车场和路径的选择来进一步减少个人出行成本。均衡条件为,
(8)
(Cr,p+μsp,r-λs,r)qsp,r=0,Cr,p+μsp,r-λs,r≥0,qsp,r≥0,∀r,s,p
(9)
式中:μsp,r表示均衡态下从目的地s到停车场p之间(由起点r出发)的最小出行成本,fsp,rl表示从目的地s到停车场p之间(由起点r出发)的路径l上的流量;λs,r表示均衡态下从目的地s到停车场(由起点r出发)的最小净出行成本,包括路径行驶时间和停车成本两部分;qsp,r表示从目的地s出发选择停车场p(由起点r出发)的需求量。(8)式是路径选择均衡条件,表示停车场确定情况下AVs选择最短的路径去停车场,(9)式是目的地选择均衡条件,表示AVs选择出行成本最小的停车场。
3 交通均衡模型构建
假设OD需求量固定,建立自动驾驶环境下的交通均衡数学规划模型,
(10)
(11)
(12)
(13)
(14)
(15)
(16)
式(10)是目标函数,无直观经济学含义;式(11)表示OD对r—s之间的路径流量与需求量的守恒关系;式(12)表示从目的地s到停车场p(由起点r出发)之间的路径流量与s—p的停车需求量(由起点地r出发)之间的守恒关系;式(13)表示从目的地s到停车场p的停车需求量(由起点r出发)与OD对r—s之间需求量的守恒关系;式(14)表示非负约束;式(15)和(16)表示路段流量与路径流量之间的关系。
下面证明式(10)—(16)的一阶条件等价于均衡条件式(7)—(9)。首先,假设同一路段上,空载AVs路段流量对载人AVs路段行驶时间成本的边际贡献与等当量的载人AVs路段流量对空载AVs路段行驶时间成本的边际贡献相等,即,
(17)
由数学规划基本理论可知,式(10)—(16)的拉格朗日函数为,
(18)
式中:μrs、μsp,r、λs,r分别为约束(11)—(13)的拉格朗日乘子,对目标函数Z求关于x1,a的一阶偏导数,得,
(19)
由假设条件式(17)可知,
t1,a(x1,a,x2,a)-t1,a(x1,a,0)
(20)
因此,
(21)
同理,目标函数Z对x2,a求一阶偏导可得,
(22)

(23)
(24)
(25)
(26)
对拉格朗日函数分别求关于qsp,r、λs,r的一阶偏导数,得,

(27)
(28)
综上,拉格朗日函数对应的一阶条件为,
(29)
(30)
(Cr,p+μsp,r-λs,r)qsp,r=0
Cr,p+μsp,r-λs,r≥0
(31)
(32)
显然式(29)—(31)与均衡条件(7)—(9)等价。模型等价性证明完毕。
4 解的唯一性证明
在实际情况中,载人AVs和空载AVs混行的路段行驶时间成本函数应该具有以下特点:
1)路段行驶时间成本随流量的增加而增加,即,
(33)
2)载人AVs路段流量对载人AVs路段行驶时间成本函数的影响超过空载AVs路段流量对其路段行驶时间成本函数的影响。对于空载AVs也有类似的结论,即,
(34)
(35)
将目标函数写成两部分之和,即,
Z=Z1+Z2
(36)
其中,

(37)
(38)
因为Z2是线性函数,为凸函数,所以只需要证明Z1的Hessian矩阵是正定的即可。
Z1对路段a的流量x1,a求一阶偏导,
(39)
分别求x1,b和x2,b的二阶偏导,
(40)
(41)
同理可得,
(42)
(43)
Z1的Hessian矩阵可表示为如下的分块对角矩阵:
(44)
其中,
(45)
由出行成本函数一般满足式(33)—(35)可知,

(46)
5 求解算法
式(10)—(16)讨论的是路段相互影响并且含停车场选择的组合均衡问题。为求解方便,通过网络变换法,将原问题转化成等价的标准UE问题再求解。如图3,实线代表实际道路,假设网络中有M个起始节点,N个目的地节点,I个停车场,为每一个起始节点r设置一个虚拟讫节点r′,表示起始节点出发的流量最终会抵达相应的虚拟节点。用虚线将停车场与每一个虚拟节点相连接,虚线上的路段出行成本为相应的停车成本Cr,p。此时网络中新增了OD对(s—r′),且新增OD对的需求量qsr′=qrs。

图3 等价网络
在等价网络中,假设实际路段集合为A1,虚拟路段集合为A2,空载AVs的路段出行成本函数为,
(47)
因此,数学规划模型可以转化为,
(48)
(49)
(50)
(51)
(52)
(53)
(54)
可以看出两个模型基本一致,若将变换网络求解出来的qsp,r′看成qsp,r、qsr′看成qrs,就和式(10)—(16)完全一致。
将约束条件(50)和(51)合并,并改写式(54),得到,
(55)
(56)

式(48)、(49)、(52)、(53)、(55)、(56)就是变换网络的UE模型。因此,对图3按照固定需求UE模型求解,即可得原模型的解。而经典UE模型的求解算法较多,本文使用MSA算法,具体步骤可参考文献[15]。
6 算例
网络结构如图4所示,两个OD对,qOD=1 000 pcu·h-1和qO′D′=1 500 pcu·h-1,四个停车场可供AVs选择,其中家庭停车场1(P1)和3(P3)分别位于起点O和O’,停车场2(P2)和4(P4)为公共停车场。路段a的成本函数如下:

图4 交通网络结构
t1,a(x1,a,x2,a)=h2,a(x2,a,x1,a)=
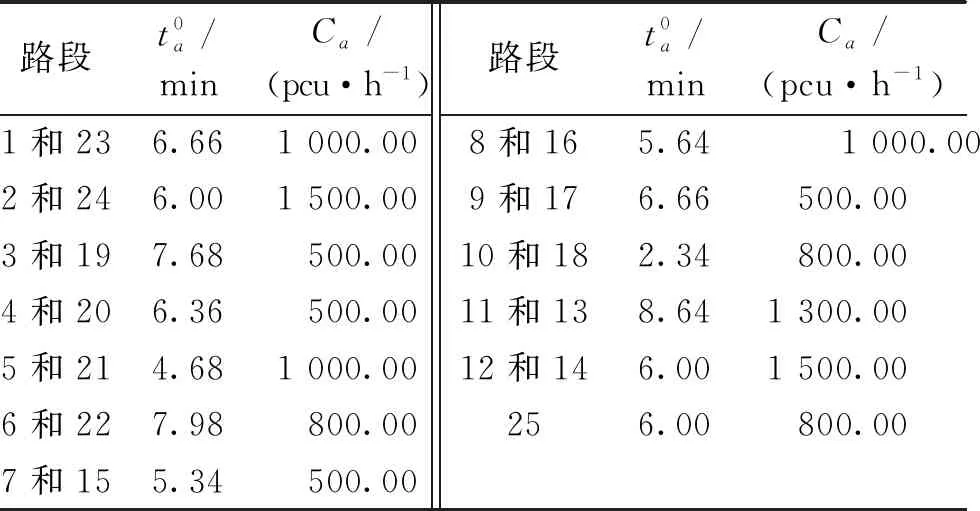
表1 路段属性

表2 停车费
固定停车场4的费用,中心停车场2的费用逐渐减少,分析路段流量、停车场需求量和个人总出行成本的变化情况,如图5—图7。
图5显示了停车场2周围8个路段流量变化情况,停车场2的费用减少百分比在0%~32%时,路段流量不变化;在32%~57%之间时,流向停车场2的路段流量增加;超过57%时,路段流量不再受到停车场2费用的影响。由此可以看出,停车场2的停车费在一定范围内变化,会使局部路段流量产生明显变化,当超出这个范围,对路段流量不再产生影响。
图6显示了当中心停车场的停车费降低,AVs就近选择公共停车场。当停车场2的费用减少百分比在0%~32%时,各停车场需求量无变化,此时停车选择结果与停车场2费用无关。在32%~40%时,停车场4的需求量升高,主要是因为选择停车场2的AVs增多,导致局部路段行驶成本上升,相比而言,选择停车场4的成本较低,所以从O’出发的空载AVs部分选择停车场4;超过40%时,停车场4的需求量开始降低,主要因为停车费的降低高于路段行驶成本的增加;超过49%时,停车场3的需求量变为0,表明从节点O出发的空载AVs全部选择停车场2;超过53%时,停车场4的需求量变为0,表明从节点O’出发的空载AVs选择停车场1和2;超过57%时,停车场1的需求量变为0,整个网络的AVs全部选择停车场2,此时网络中停车选择与停车场2的费用无关,各停车场需求量不再变化。
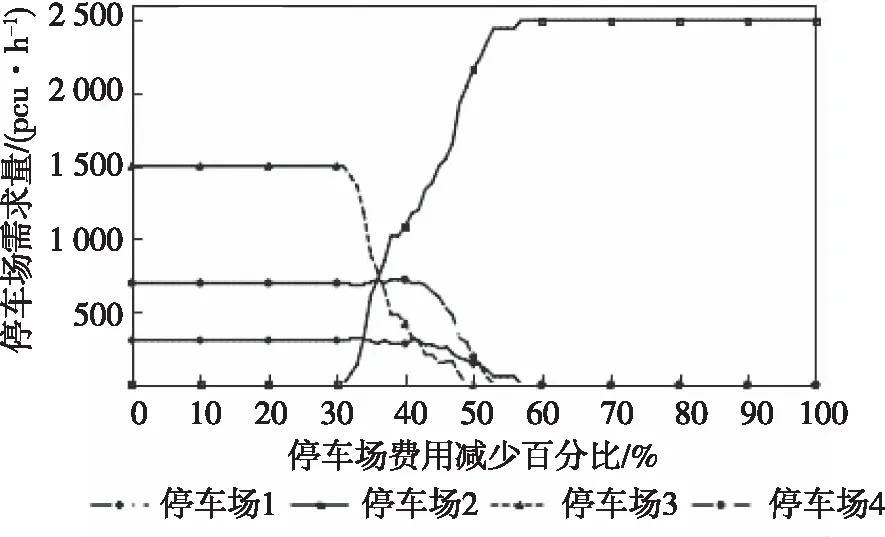
图6 停车需求量变化情况
图7显示了个人总出行成本变化情况,当停车费减少不超过32%时,停车场2的停车费变化不对个人总出行成本产生影响;超过32%时,随着停车费的持续下降,个人出行总成本总体上是降低的,这是因为除了停车费降低外,较低的停车费也会激励更多的出行者选择公共停车场,而不是回到出发地停车,以此减少空载AVs额外的出行需求造成的道路拥堵以及行驶所产生的油耗。另外,在32%~57%之间时,总出行成本产生波动,虽然停车费降低,但AVs寻找停车场增加了额外的出行需求,导致总出行成本上升。而超过57%时,停车费的变化不再影响出行者的停车选择,此时个人总出行成本与停车场2的费用呈线性关系。

图7 个人总出行成本变化情况
7 结语
当考虑停车选择过程时,AVs与普通汽车的出行模式存在差异,这将产生额外的出行需求,基于此建立了相应的均衡模型,探讨了不同的停车费对路网均衡状态的影响程度,研究成果可为自动驾驶环境下的停车费设置提供参考。本文算例中停车场2相当于市中心的公共停车场,结果表明,个人出行总成本会随停车费降低而出现波动性变化,这意味着在AVs使网络用户受益的同时,也对管理者提出了新的挑战,因为它改变了交通模式并导致了部分道路拥堵加剧。
