射手模型优化与辨识及其对图像制导的影响
2021-08-03王辉李涛唐道光吴骏雄张意黎海青
王辉,李涛,唐道光,吴骏雄,张意,黎海青
1.北京理工大学 宇航学院,北京 100081 2.北京理工大学 无人机自主控制技术北京市重点实验室,北京 100081 3.北京信息科技大学 高动态导航技术北京市重点实验室,北京 100085 4.中北大学 电气与控制工程学院,太原 030051 5.中国北方工业公司,北京 100053 6.中国兵器工业第203研究所,西安 710065
现代战争中,虽然大规模压制武器依然扮演着重要角色,但图像精确制导弹药以其成像清晰、精度高、附带损伤小等特点在世界范围内受到了高度重视,并在历次战争和局部冲突中大量使用且战绩显著[1-5]。作为图像精确制导弹药的核心技术,图像制导技术主要完成对目标的探测、识别和跟踪,并提供准确的导引信息。随着图像处理、高分辨率传感器技术、芯片技术和人工智能的迅速发展,图像制导技术发展迅猛且越来越受关注,能够多波段、高灵敏度、高分辨率地获取丰富的战场成像信息,有利于在复杂背景中发现和识别目标,提高反隐身和抗干扰能力,是当前各国精确制导技术的研究热点[6-9]。
未来战场环境日趋复杂,在目标伪装、距离较远或出现相似干扰的情况下,自动目标识别技术的应用尚有很多技术难点需要突破[10-11]。利用射手的识别能力,人在回路识别技术适用于复杂环境干扰和目标伪装下的目标识别,攻击灵活性较高,因而有较大研究价值。射手通过导弹传回的实时图像信息快速识别并灵活锁定目标,通过图像跟踪器自动跟踪或控制手柄手动跟踪直到击中目标,此方式即为人在回路制导[12-13]。各国现役的光纤图像制导弹药射程一般在15 km以内,质量、搭载空间的限制等原因导致其无法在更远的作战距离上采用光纤传输图像信息[14]。相比之下,采用无线电的数据链通信具有传输距离更远的优势[15-16],但无线电通信带宽较低,图像数据的发送和接收需要经过压缩和解压,此过程必然会造成图像信号延时[17-18],导致射手难以快速准确地识别和捕获目标,甚至出现人机耦合诱发振荡现象[19-21]。
射手模型描述了射手控制导引头光轴跟踪目标的过程,手动跟踪时射手-导引头是人工控制系统。含有射手动力学的图像导引头控制回路会对目标在视场中的误差角进行跟踪补偿,从而提升图像制导弹药的控制性能和制导精度。因此,明晰射手在不同图像信号延时下对于图像导引头跟踪误差的响应,对设计制导控制系统和提升制导精度十分重要。20世纪中叶,研究者开始对射手进行建模,McRuer等提出的精确扩展交叉模型最具代表且应用广泛[22-23],在更广的频率范围内描述了射手的动态特性。然而在实际控制任务中,射手为了更好地适应控制对象动力学与图像信号延时,其操作行为多分布在较高频段且表现出超前特性。之后很多射手模型参数辨识的研究都采用了McRuer等提出的模型,且包含不同类型的激励信号[24],辨识方法包括最大似然估计法、遗传算法和区间分析法[25-27]。1970年之后,现代控制理论发展迅速,Kleinman等提出了最优控制模型[28],Hess建立了Hess 结构模型[19],可以准确表征射手的信号处理过程。近年来,射手建模逐渐频繁应用神经网络技术和模糊控制[29]。
射手模型参数反映了射手响应的详细特征,可以利用实验数据进行参数辨识获得。参数辨识方法包括两种:一种是射手对时不变控制对象的响应,如傅里叶系数法和最大似然估计法[24,30];另一种是射手对时变控制对象的响应,如小波变换法[13,31]和Kalman滤波法[32]。赵军民等利用辅助变量法辨识射手模型参数,但固定了射手模型的神经延迟环节,只跟踪直线运动的坦克目标,无法充分激励射手响应[33]。唐道光等研究了自动跟踪、无延时手动跟踪和有延时手动跟踪3种模式下导引头回路与制导回路的性能,但是所考虑的射手模型在不同控制环境下的模型参数保持不变,忽略了射手对控制环境的适应性[34]。Potter和Singhose研究了在存在时间延迟的手动控制系统中,输入整形(Input Shaping)能否提高射手对柔性系统的跟踪性能,但控制对象仅限于低频、轻微阻尼的振动模式[35]。文献[36]研究了多轴控制任务中射手适应时变控制动力学的建模过程,但射手模型参数没有从实验数据中获得。
本文基于真实的图像导引头模型及参数,引入两类射手模型,第2类射手模型为McRuer等提出的精确扩展交叉模型,针对其难以准确描述射手对图像信号延时的超前补偿特征和操作行为的高频分布问题,优化了射手模型结构;针对上述参数辨识实验存在的激励信号单一和参数未从实验获得的问题,设计宽频率的随机激励信号,通过辨识实验得到动力学参数。此外,基于相同射手识别同一目标和射手对不同图像信号延时的适应性,对比研究了两类射手模型与不同图像信号延时对人在回路式图像制导弹药导引头特性和制导性能的影响。本文的主要贡献为优化射手模型结构,实验辨识动力学参数,以及通过仿真实验研究两类射手模型对制导系统的影响。
1 图像导引头模型
1.1 导引头控制系统工作原理
图像导引头控制系统保证了导引头光轴在空间的稳定性,完成对目标的搜索、捕获与跟踪。图像导引头通常采用角速率陀螺式平台导引头,其俯仰框与偏航框的控制系统相互独立且结构相似。表征实际图像导引头系统单通道控制回路的模型如图1所示,包含稳定回路和跟踪回路。稳定回路作为跟踪回路的内回路,作用是隔离弹体角扰动、稳定导引头光轴指向以及改善跟踪系统的速度特性与加速度特性。跟踪回路的作用是在手动或自动跟踪模式下,依据射手或图像跟踪器给出的目标位置误差信息,控制导引头光轴运动,以实现对目标的实时跟踪。
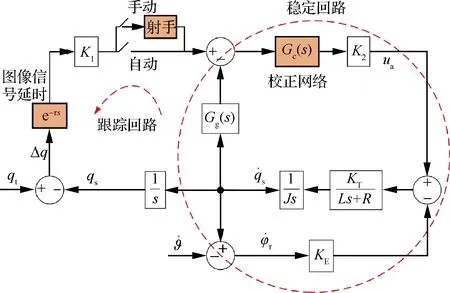
图1 图像导引头控制回路

在导引头跟踪目标时,图像传感器实时敏感导引头视线误差角Δq,控制电路综合Δq与角速率陀螺输出的反馈信号,生成控制电流驱动力矩电机,力矩电机带动平台转动以消除Δq,从而使导引头光轴实时跟踪弹目视线,所以平台导引头控制系统实质是一种角跟踪系统。某型平台导引头参数如表1所示[37]。
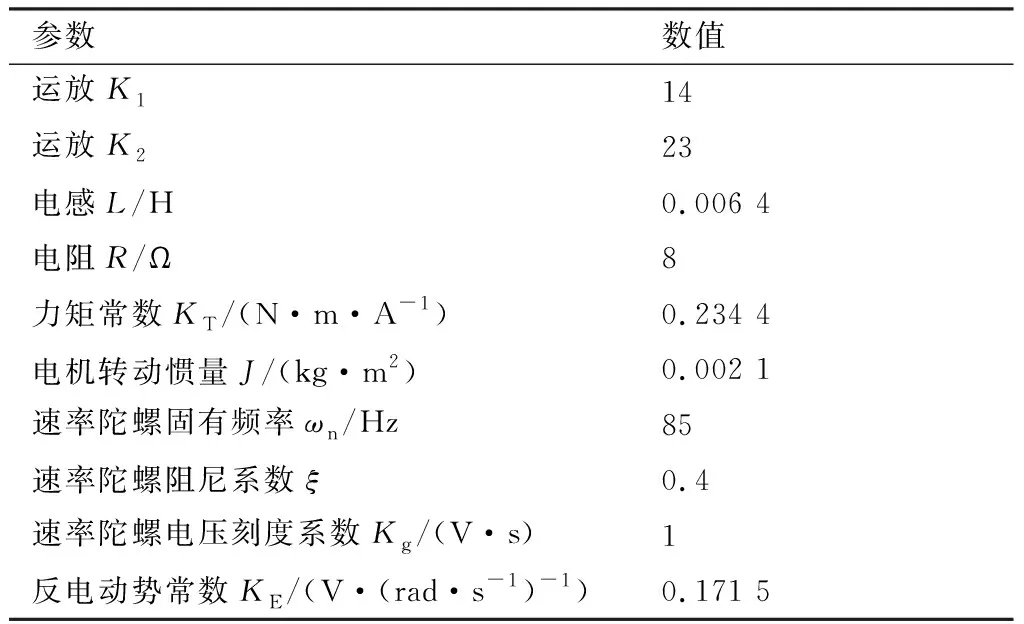
表1 平台导引头参数
1.2 稳定回路校正网络
因为轴承间存在摩擦力矩等干扰,弹体姿态变化会影响导引头在惯性空间的指向和输出。为了消除弹体运动耦合,稳定回路的设计通常使其具有较高的开环增益和较宽的带宽。根据去耦能力指标可以确定稳定回路开环增益和设计合适的校正网络,以满足系统稳定性需求。依据已建立的图像导引头控制回路,稳定回路如图2所示。
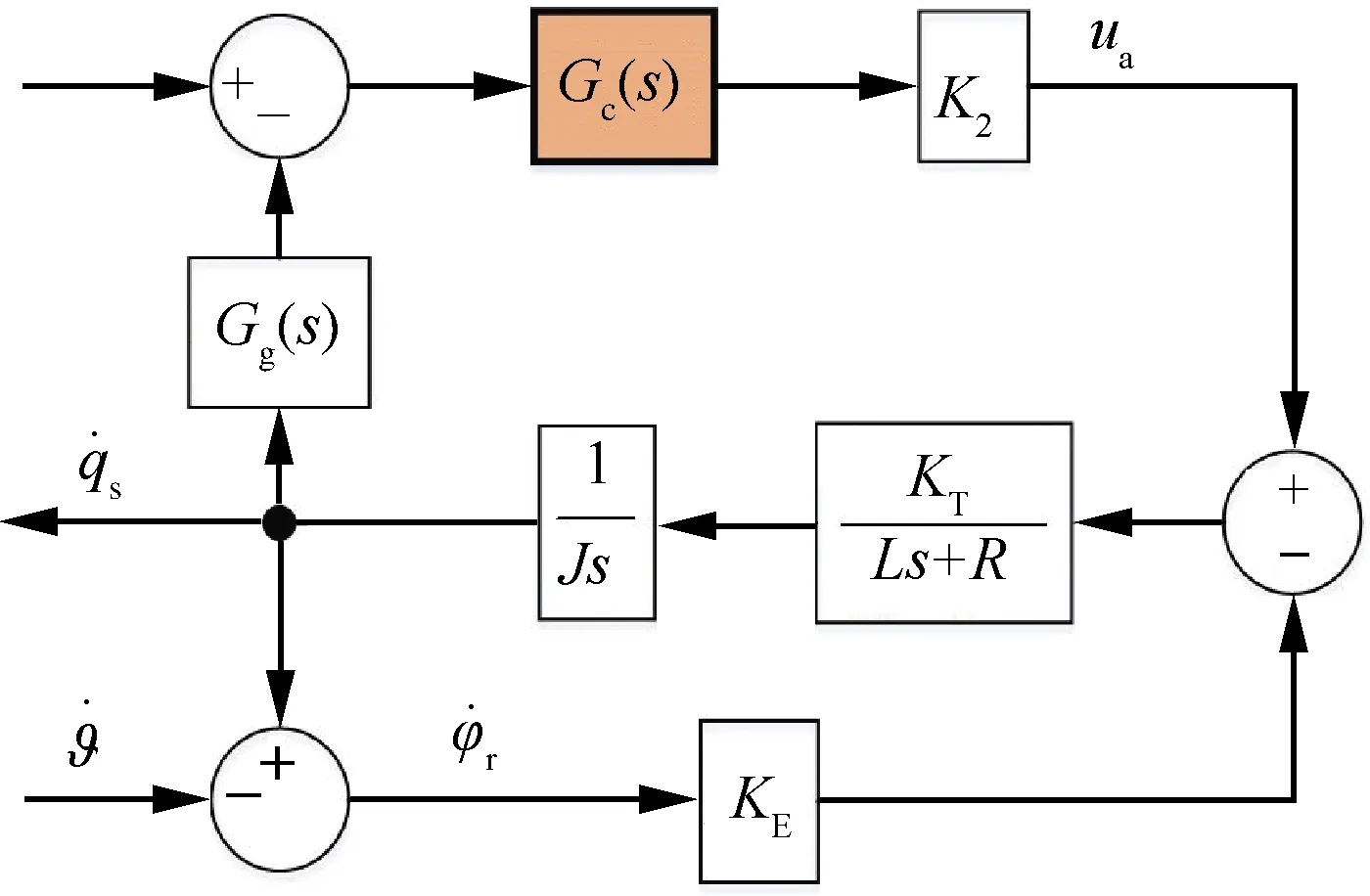
图2 图像导引头稳定回路
基于上述导引头参数,设计的滞后校正为[38]
(1)
校正前和校正后的稳定回路开环频率响应如图3所示,响应参数对比如表2所示。可知未校正系统稳定性较低,而滞后校正的加入使系统高频段的幅值衰减,从而降低了系统的幅值穿越频率;滞后校正参数的恰当选取较大程度地提升了校正后系统的稳定性,从而保证了校正后的系统可以同时满足稳定裕度和去耦能力指标的要求。
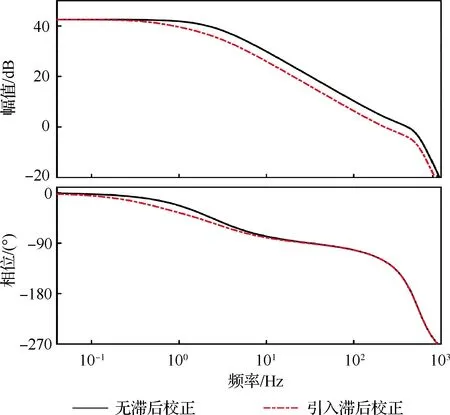
图3 稳定回路开环频率特性

表2 稳定回路开环频率响应参数
2 射手模型优化和动力学参数辨识
2.1 射手模型1
文献[33]基于射手固有动态特性,研究分析射手操作行为,理论上建立的射手拟线性模型为
(2)
式中:射手手动跟踪目标时的适应参数kp、T1、T2与被控对象——空地导弹/反坦克导弹的运动规律有关,而视觉感知反应延时τ′和神经肌肉延迟时间τn是射手的固有属性。
文献[33]利用辅助变量法辨识动力学参数,变化范围如表3所示。对于训练有素的射手,神经肌肉延迟时间τn接近于0.1 s,视觉感知反应延时τ′通常取0.15 s。
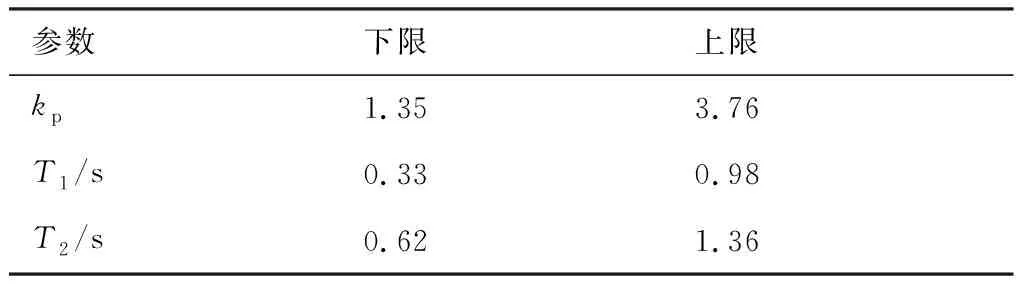
表3 动力学参数
针对式(2)所示的射手模型1,本文采用文献[39]中的辨识方法获取其动力学参数,即先用最大似然估计法得到参数估计值,再用混合梯度优化算法寻找全局最优解,并且保证两类射手模型选用同一批参试人员进行动力学参数辨识,最终得到射手模型1的仿真参数见表4。

表4 射手模型1的仿真参数
2.2 射手模型2—PEC模型优化和参数辨识
McRuer等描述射手行为时采用精确的扩展交叉模型——PEC 模型(Precise-Extended Cross Model)。相比于频率适用范围仅局限于幅值穿越频率附近的射手交叉模型,PEC模型的频率覆盖范围扩展到了高频处和低频处[22]。其响应包含两个部分,分别为线性传递函数的响应和残差信号。通常认为残差信号为高斯信号,表示射手模型的非线性部分,因为难以定量衡量其大小,导致无法定量研究控制系统指标,因而在分析和设计时不考虑残差信号对控制系统的影响[39]。PEC 模型射手对图像显示做出响应的线性传递函数为
(3)
式中:Kp为视觉感知增益;τL为视觉感知超前时间常数;τl为视觉感知滞后时间常数;ξnm为神经肌肉系统阻尼;ωnm为神经肌肉系统自然频率;τd为视觉感知反应延时。

如图4所示,PEC模型由配平项和物理约束两部分组成。McRuer等提出的交叉定理[22]显示,为了更好地适应控制对象动力学,射手会调整其配平项动力学,从而使系统开环传递函数在交叉频率处的频率特性接近于单积分器系统。实际控制任务中,射手控制对象动力学的形式一般类似于1/s(0.01s+1),即射手的实际控制对象多分布在较高频段,射手会在更高的频率附近进行配平[39-40];此外,在射手对视场中的误差角进行跟踪补偿时,射手对不同图像信号延时具有适应性,图像信号延时越长,射手常表现出超前补偿的特征。由于以上两点原因,PEC模型中表示低频特性的滞后时间常数τl难以准确地描述射手的真实操作行为,同时文献[37]表明τl难以通过辨识实验获得,因此式(3)表示的PEC模型结构优化为
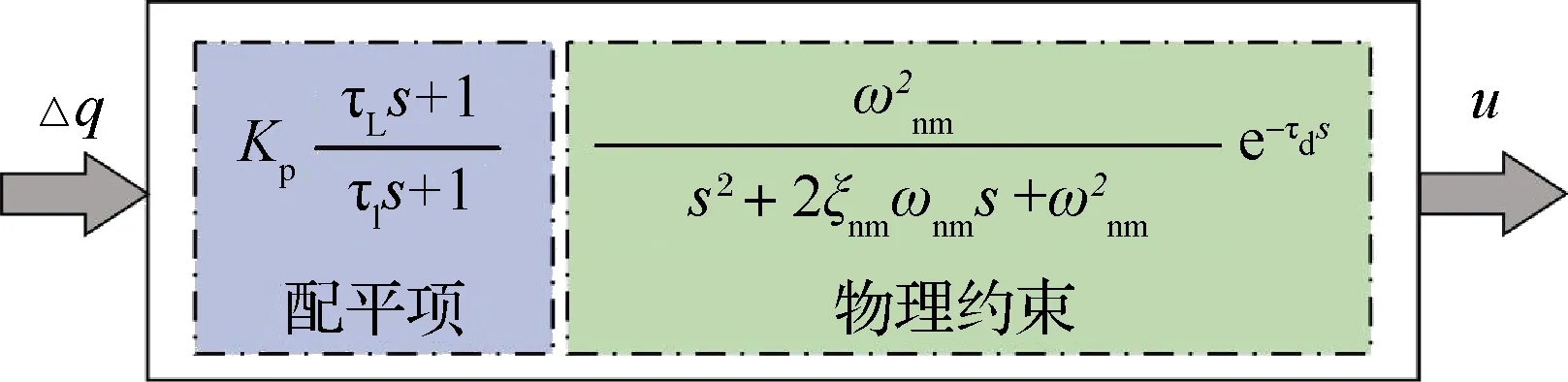
图4 PEC模型

(4)

针对该辨识参数向量,文献[37]进行了数次人在回路实验,运用最大似然估计法获得射手模型的参数估计值,运用混合梯度优化算法寻找全局最优解。人在回路制导方式中射手控制的是导引头内回路,其动力学特性在飞行过程中变化不大。在射手模型2的参数辨识实验中,射手对目标在视场中的误差角进行跟踪补偿,为使激励信号具有较宽频率范围且表现出一定随机性,激励信号设计为一些正弦信号叠加而成,表示为
(5)
式中:Aj为正弦信号的幅值;ωj为正弦信号的频率;φj为正弦信号的相位,j=1,2,…,N,N为正弦信号的个数。
为了充分激励射手响应,激励信号的频谱应该在高频与低频之间折中分布,因此正弦信号频率设计在ωj=0.1~20 rad/s的范围里按对数尺度均匀分布,幅值分布类似于一阶低通滤波器,此外,相位对实验结果影响很小因而随机选择。正弦信号个数N=10时,激励信号如图5所示。

图5 激励信号
人在回路实验在图6所示的半实物仿真系统上进行。动力学仿真模块用来采集手柄的输出信号,同时仿真图1所示的图像导引头动力学并通过UDP通讯协议将视线误差角呈现在显示模块上,参试人员依据该误差信号,操纵手柄使导引头光轴指向目标以减小跟踪误差。选取6位参试人员采集数据,参试人员A为未经过培训的“新手”,参试人员B~F为受过前期培训的“老手”。辨识结果如表5所示,由于参试人员个体差异性和控制策略不同,实验结果略有不同。
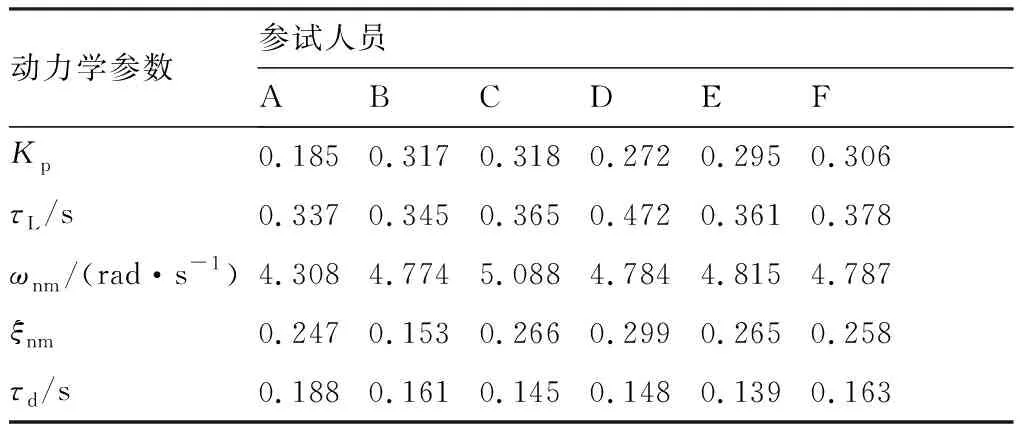
表5 参试人员的辨识结果

图6 半实物仿真系统简图
图7为所有参试人员辨识模型的伯德图,可知参试人员A的幅频特性明显低于其他参试人员。为了更真实普遍地反映射手的动态特性,研究射手模型2对导引头控制系统影响时,选取参试人员B~F的辨识结果并取平均值,得到射手模型2的动力学参数向量θ。
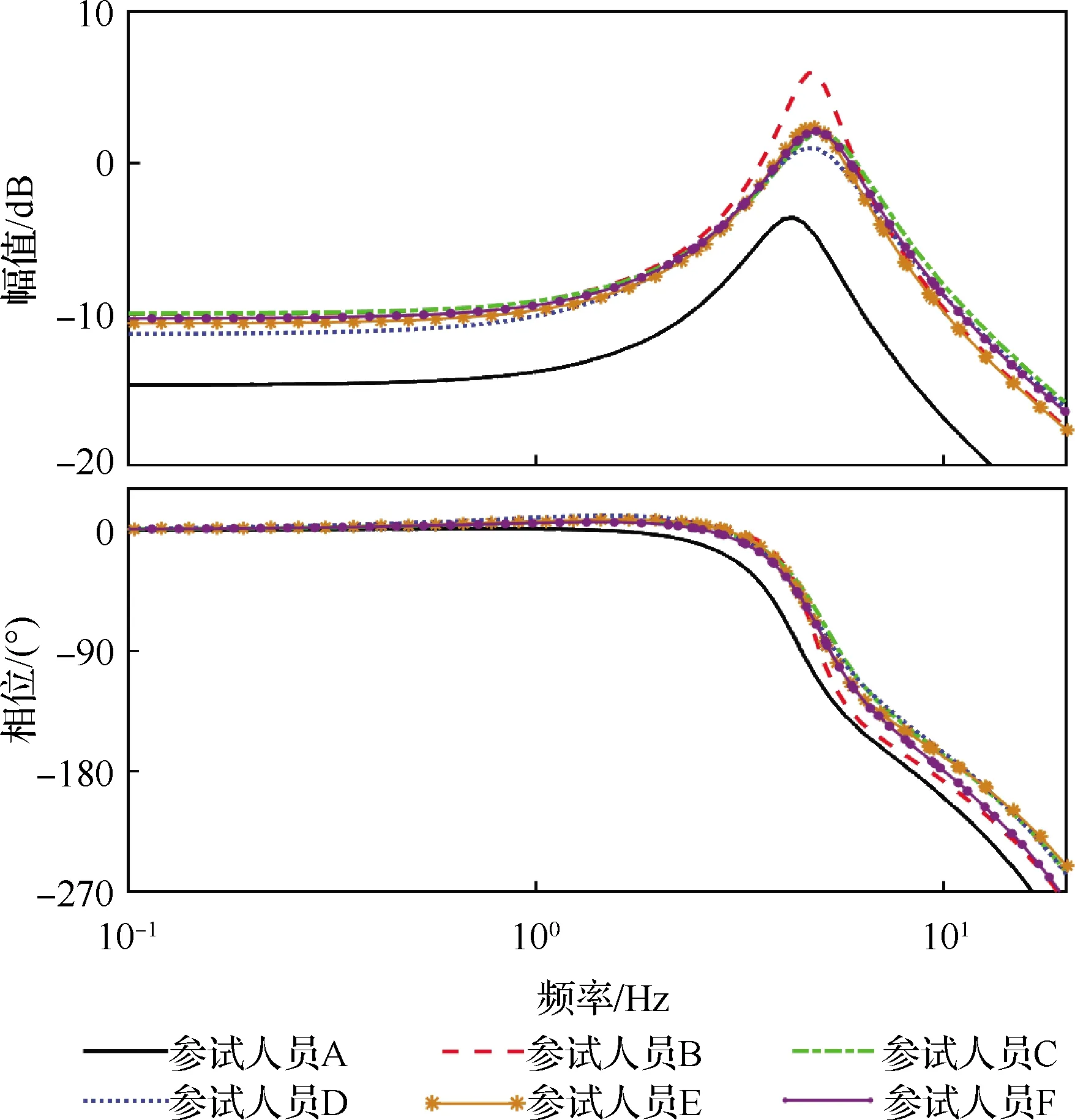
图7 参试人员辨识模型的伯德图
图8为导引头跟踪回路的开环频率响应,包含图像信号延时、射手环节与稳定回路。图8验证了McRuer等提出的交叉定理,幅频特性曲线在幅值穿越频率处的斜率约为-20 dB/dec,然而因为参试人员面对图像信号延时会产生适应性超前调节行为,导致了高频输入区的幅频特性曲线的斜率小于-20 dB/dec。

图8 所有人机系统开环频率特性
3 射手模型对导引头控制系统的影响
3.1 稳定性影响研究
根据图1所示的图像导引头控制回路,分别研究引入射手模型1和射手模型2后导引头控制系统的稳定性。导引头稳定回路闭环传递函数为
(6)
结合式(1)所示的滞后校正网络和表1所示的平台导引头参数,由于主导极点对系统的瞬态响应发挥主导作用,则式(6)近似等效为
(7)
导引头跟踪回路开环传递函数为
(8)
式中:K1为跟踪回路放大器增益;τ为图像信号延时;Gp(s)为射手模型1或2;Φ1(s)为稳定回路闭环传递函数。
研究相同射手识别同一目标的情况,因而射手动力学近似不变同时反应延时恒定,不同射手模型的参数选取如表4所示。稳定裕度表示控制系统的相对稳定性,包含幅值裕度和相位裕度。相位裕度γ表述为
γ=π+Φ(ωc)
(9)
式中:ωc为幅值穿越频率;γ的物理意义是,当Φ(ωc)再滞后γ角度时,系统处于临界稳定状态,一般经验上取γ=30°~60°。
引入射手模型1,相位裕度γ=45°时,由奈奎斯特稳定性判据,图像信号延时τ与导引头跟踪回路开环增益K的关系如式(10)所示,其推导过程见附录A。
(10)
同理,引入射手模型2,相位裕度为γ=45°时,图像信号延时τ与导引头跟踪回路开环增益K′的关系如式(11)所示,其推导过程见附录B。
(11)
引入射手模型1和射手模型2后,不同相位裕度和图像信号延时下的导引头稳定域如图9所示。由稳定域与相位裕度、图像信号延时、导引头跟踪回路开环增益的关系图可知:① 相位裕度越大,导引头稳定域越小,则在固定图像信号延时条件下设计的开环增益就越小,从而降低了导引头跟踪目标的快速性;② 图像信号延时越长,导引头稳定域越小,则在固定相位裕度条件下设计的开环增益就越小;③ 引入射手模型2后的稳定域小于引入射手模型1后的稳定域,则在固定图像信号延时和固定相位裕度条件下设计的开环增益就越小。

图9 引入不同射手模型的导引头稳定域
3.2 快速性影响研究
根据图1所示的图像导引头控制回路,结合式(1)所示的滞后校正网络和表1所示的平台导引头参数,分别研究引入射手模型1和射手模型2后,即手动跟踪模式下导引头的快速性。在实际控制任务中射手对被控对象动力学具有一定的适应能力,例如图像信号延时越长,射手可能会表现出较低阻尼的神经肌肉动力学特征,同时提供较大的超前相位,以保证系统的稳定。自寻的制导模式是由弹上计算机识别和锁定目标,无数据链传输图像信号和射手环节。
图10所示为手动跟踪模式下射手模型对导引头快速性的影响,考虑射手对图像信号延时的适应性,可知:① 手动跟踪模式下,延时环节存在时,导引头系统保持了一定的稳定性,这是因为射手的适应性控制行为补偿了延时带来的相位滞后;② 图像信号延时越长,导引头跟踪速度越低,跟踪误差角越大,容易致使目标逃出探测器的视场范围;③ 相同延时情况下,相比射手模型1,引入射手模型2后的导引头系统跟踪误差角较小,跟踪精度高。此外,相比于自寻的制导模式,手动跟踪模式下导引头系统的跟踪速度较低,精度与稳定性较差,从而导致手动跟踪模式下的制导系统性能降低。

图10 手动跟踪模式下射手模型对导引头快速性影响
4 人在回路对比例导引制导精度的影响
4.1 建立制导系统模型
为了研究手动跟踪模式下不同射手模型与图像信号延时对比例导引制导精度的影响,结合上文图像导引头模型,基于小角度假设建立了人在回路比例导引制导系统单通道线性模型,引入导弹初始速度指向误差、目标常值机动与目标随机机动3类误差源后的制导系统如图11所示。

(12)
式中:u(·)是单位阶跃函数,起始时间ts是随机变量,且在制导时间[0,T]上呈现均匀分布。
由文献[41]可知,目标随机机动等效的成形滤波器为一个积分器,表示为
(13)

伴随法常用于分析制导系统性能,它可以高效快速地分析出不同误差源对脱靶量的影响,其基本思想是把脱靶量的平均值与方差表示成不同误差源的贡献的加权和,而伴随模型的脉冲响应表示每个误差源的加权系数。图11所示的线性制导系统经过变换后的伴随模型如图12所示,其中yf为目标常值机动输入所引起的脱靶量;yε为导弹初始速度指向误差所引起的脱靶量;yr为目标随机机动输入所引起的脱靶量。

图11 手动跟踪模式下的制导系统

图12 手动跟踪模式下制导系统的伴随模型
4.2 制导精度分析
依次分析导弹初始速度指向误差、目标常值机动和目标随机机动3类误差源输入下,手动跟踪模式下射手模型与图像信号延时对制导系统脱靶量的影响,仿真参数设置如表6。

表6 射手模型2的仿真参数
图13 导弹初始速度指向误差输入下脱靶量变化

图14 目标常值机动输入下脱靶量变化
图15 目标随机机动输入下脱靶量变化
5 结 论
由于训练有素的射手对不同控制对象与控制场景具有适应性,而射手对复杂背景下目标的反应延时是影响射手模型的主要因素,因此人在回路制导模式末制导弹道的设计应该便于图像导引头成像。结构优化后的射手模型2更准确地表述了射手对图像信号延时的超前补偿特性和操作行为的高频分布现象,宽频率随机激励信号的设计充分激励了射手响应,通过辨识实验得到了动力学参数。基于相同射手识别同一目标的仿真实验表明:人在回路手动跟踪模式下,图像信号延时越长,导引头的稳定域越小,即在固定相位裕度条件下所设计的开环增益就越小,导致导引头跟踪速度越低,且稳定跟踪时的误差角越大,容易致使目标逃出探测器的视场范围;射手的适应性控制行为一定程度上补偿了延时环节带来的相位滞后;相同延时情况下,相比射手模型1,引入射手模型2后的导引头系统稳定跟踪时的误差角较小,跟踪精度较高。
射手模型与图像信号延时会影响导引头的稳定性与快速性,从而影响手动跟踪模式下比例导引制导系统的脱靶量和收敛时间。相比自寻的模式,手动跟踪模式下制导系统的收敛时间随图像信号延时的增加而增加,不仅对导引头的探测距离要求更高而且增加了射手的工作负荷。射手动力学增加了制导系统的收敛时间,相比射手模型1,引入射手模型2的制导系统的收敛时间更短。由于射手的适应性,手动跟踪模式只能满足目标过载常值与导弹初始速度指向误差输入下制导系统的性能要求。
附录A
引入射手模型1,导引头跟踪回路开环传递函数为
(A1)
式中:开环增益K=2.56K1。
将式(A1)改写成复数形式:

(A2)
式中:Φω=(τ+0.15)ω+arctan(0.11ω)+arctan(1.35ω)-arctan(0.37ω)。
由奈奎斯特稳定性判据[42],可知相位裕度γ=45°时的稳定条件为
(A3)
解得
(A4)
假设本文研究的空地导弹、反坦克导弹弹道变化较小,认为导引头输入信号的频率较低,即ωx较小,则
(A5)
可得相位裕度γ=45°时,图像信号延时τ与导引头跟踪回路开环增益K的关系如式(10)所示。
附录B
引入射手模型2后,导引头跟踪回路开环传递函数为
(B1)
式中:开环增益K′=0.3K1。
将式(B1)改写成复数形式:
jcos(Φ″ω+γ)]
(B2)

相位裕度为γ=45°时,由奈奎斯特稳定性判据,可得图像信号延时τ与导引头跟踪回路开环增益K′的关系如式(11)所示。
