基于内腔光阱的光力加速度测量方法
2021-07-29刘子捷邝腾芳冯海宁肖光宗
刘子捷,熊 威,邝腾芳,冯海宁,肖光宗,罗 晖
(国防科学技术大学前沿交叉学科学院,长沙 410072)
0 引言
自诞生以来,基于光阱悬浮微粒的精密测量技术已在生物学和纳米科学等领域广泛应用[1-2]。与传统的精密测量方法相比,利用光阱进行测量的主要优势在于被捕获微粒不与外界接触,在较高真空度的情况下,可以消除一般力学传感器中的热噪声[3]。得益于这一特点,悬浮光力学成为过去10年间的热门研究方向,对悬浮微粒的力测量精度有望接近量子极限[4]。
2008年,美国麻省理工学院的D. L. Butts等首次提出了利用光阱技术进行加速度传感,通过在真空中捕获微粒,结合反馈冷却增大微粒在真空中的稳定性等手段,实现对沿光束轴向1g重力的测量,初步实验达到了119μg/Hz1/2的加速度测量精度[5]。2010年,该小组利用双光束光阱捕获微粒,提出了一种对微粒形状不敏感的探测方法,简化了实验系统的机械结构,降低了系统噪声,在一定程度上提升了光力加速度计的分辨率和零偏稳定性[6]。2018年,耶鲁大学的Monteiro等设计了一种基于单光束光镊的加速度测量装置。以质量为0.1~30ng的SiO2微粒作为探针进行加速度传感,发现适当增加微粒大小能够提高加速度传感的灵敏度。对质量为12ng的SiO2微粒进行测量,对信号长时间平均后加速度测量精度可以达到nano-g量级[7]。
在国内,浙江大学基于光纤光阱设计了多种结构的光力加速度计[8-9],并对提高加速度计测量灵敏度的方法进行了理论分析和实验研究[10]。北京航空航天大学利用射线模型分析了光力加速度计的理论精度[11]。
微粒的精密位置探测是这些加速度测量方案中的核心技术[12]。传统的光镊系统中大多使用视频追踪和后焦面干涉测量等方法来测量微球位移[13-14]。在这些方法中,基于图像或微粒散射的位置测量模块往往需要较复杂的光路结构。
2019年,土耳其毕尔肯大学的G.Volpe首次提出在激光谐振腔内捕获微粒的光阱结构,称之为内腔光阱[15]。在内腔光阱中,通过微粒的位置调节腔内功率,为微粒的稳定提供自反馈[16]。在加速度测量时,内腔光阱的自反馈特性可以通过单个光电探测器获得微粒的位置信息,一方面简化了位置测量结构;另一方面大幅提升了加速度测量的响应速度。
本文的主要内容是利用内腔光阱的自反馈现象进行加速度测量。通过理论分析,确立了光功率与微粒加速度的关系曲线,并讨论了其非线性效应。通过外加激光的方式,讨论了工作点选取对加速度测量灵敏度的影响,并选出了合适的工作点。
1 实验系统
使用内腔光阱测量加速度的原理图如图1所示。这是一个内含光阱的环形激光器,以980nm激光(Thorlabs, CLD1015)为泵浦源,掺杂光纤为增益介质产生1030nm的激光,光纤中的激光通过准直器后变为光斑直径为3.5mm的空间光,射入2个数值孔径(Numerical Aperture,NA)为0.25的聚焦物镜Ob1和Ob2(Thorlabs, LMH-10X-1064)后产生光腰大小为6μm的聚焦光,聚焦光在空气环境中对半径为5μm的聚苯乙烯微粒产生光力作用,光力与重力共同作用捕获微粒[15]。通过隔离器使得光阱中只存在竖直向上方向的激光,让光力和重力共同作用维持微粒的稳定。光电探测器(Thorlabs, RXM10AF)探测99∶1耦合器输出的1%腔内光强,获得腔内的功率变化,进而求出系统的加速度。探测器输出的电信号可以通过功率计进行标定,从而直接输出激光功率,其最大测量带宽可以达到10GHz。在x轴方向加入了671nm的激光(长春新产业,MRL-FN-671nm),可以令微粒的平衡位置沿x轴平移,以选择合适的工作位置。
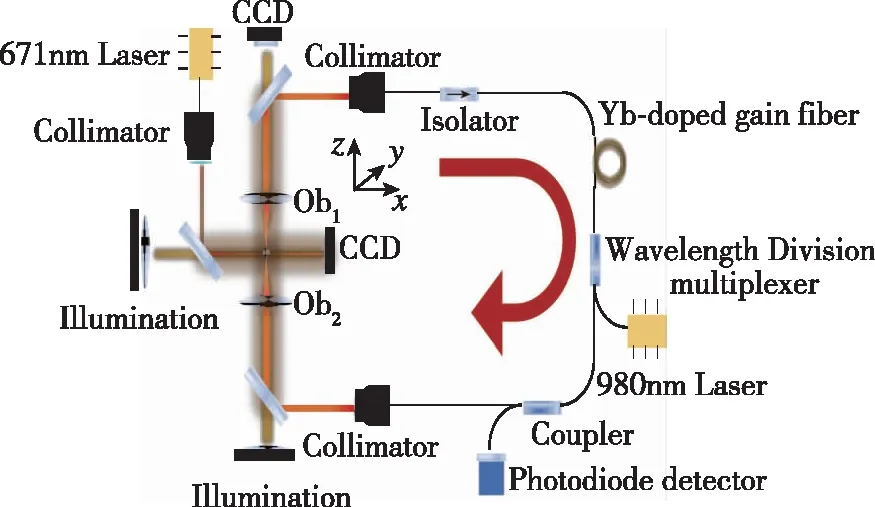
图1 内腔光阱测加速度原理图(红色箭头代表内腔光阱中激光传输方向)Fig.1 Schematic diagram of the acceleration measurement in intracavity optical trap (the red arrow represents the laser propagation direction in the intracavity optical trap)
在内腔光阱中,微粒在不同位置对激光的散射不同,散射的光越多,谐振腔的损耗越大,因此微粒位置的改变会调节谐振腔的损耗,从而影响腔内功率的大小。当腔内未捕获微粒时,腔内损耗低,激发效率高,腔内功率大;当捕获微粒时,腔内损耗大幅上升,激发效率低,腔内功率下降。同理,微粒的位置也会调节损耗,所以腔内功率可以反映微粒的位置变化信息。由于以上原因,内腔光阱中微粒的位置与腔内功率的耦合关系非常适用于高精度位置探测,这就是利用内腔光阱进行加速度测量的主要机理。
2 基本原理
2.1 数学推导
微粒在腔内所受光力与微粒到平衡位置的距离和腔内功率有关,其公式近似于弹簧振子的受力公式
F=k(r)r
(1)
其中,k(r)=κpP,κp是由实验环境和微粒的光学参数决定的常数。在一般的光阱中,腔内功率P是一个常数,但是在内腔光阱中,微粒的位置会对腔内功率进行调节。G.Volpe给出了一个非线性反馈的公式如下[11]
(2)
其中,r是微粒的径向位移;rL是内腔光阱高散射区域边界。当微粒位于该区域内时,如图2(c)所示,微粒将所有激光散射,此时腔内功率为0,图2(a)中功率为0的区域即为高散射区域,其长度为2rL。当外界存在加速度时,微粒会偏离平衡位置,与光力达到新的平衡。根据牛顿第二定律F=ma,结合式(1)和式(2)可得
ma=κpP(r)r
(3)
由式(3)进行数学推导,可以得到外界加速度a与腔内功率的关系式
(4)
其中,m是微粒的质量。当腔内功率非常微弱,P(r)比P0小1个数量级时,加速度与腔内功率成正比,此时
(5)
由式(4)和式(5)可知,腔内功率对于外界加速度的变化敏感,特别是当外界加速度微弱时,两者之间的非线性效应减弱,可近似视为成正比。为了便于分析,本文仅讨论沿x方向的加速度。
2.2 光力计算
微粒的光力分布可以反映加速度测量曲线,根据实验经验选取参数,以rL=0.5μm,P0=3.4mW,κp=4.5×10-4(N·m)/W对微粒在沿x轴方向的光力分布进行仿真,如图2所示。

(a)腔内功率的径向分布
图2(a)和图2(b)所示分别为环形腔出射光功率以及微粒受到的光力与微粒沿x方向的位置关系。当x=0时,微粒质心位于光轴上。光阱中心附近存在一段较小的高散射区域,该区域内微粒几乎将所有光线全部遮挡,激光器输出功率为0,微粒受到沿x方向的光力为0,如图2(c)所示。当微粒远离高散射区域达到图2(d)所示状态时,随着微粒位移的增大,腔内损耗逐渐降低,光功率逐渐增大,而光力出现先增大后减小的现象。当微粒完全脱离高斯光束照射范围时,腔内损耗达到最小值,激光功率最大,同时微粒已经脱离光阱区域,受到的光阱力为0,如图2(e)所示。
3 结果与讨论
3.1 加速度测量曲线
在本实验中,主要思路是利用微粒位置与腔内功率的对应耦合关系测量加速度。结合式(5)与图2仿真了腔内功率和加速度的关系曲线,如图3所示。

图3 加速度与光功率的关系曲线(小图是平衡位置附近的关系曲线)Fig.3 Relation curve between acceleration and optical power(the small graph is the relation curve near the equilibrium position)
分析图3,若工作点选在高散射区内(腔内功率为0),系统受到沿x轴的加速度时,不管沿正向还是反向都会使腔内功率变大,无法分辨加速度的方向。因此,用波长为671nm的激光将微粒推离高散射区域(见图1)。通过控制671nm激光束使加速度测量的工作点平移到图3中平衡位置,当加速度沿x轴正向时,功率上升,反之则功率下降,即可以判断加速度的方向。
3.2 灵敏度
如图3所示,在不同初始工作功率下的加速度斜率K(P)=da/dP,代表每1mW功率变化反映的加速度变化量。其倒数是系统的灵敏度,即单位加速度变化引起的系统功率变化,S=1/K(P),单位为mW/g。根据本文给出的实验参数,仿真分析了灵敏度S与不同初始功率的关系,如图4所示。

图4 不同微粒半径下,微粒初始功率与对应位置的灵敏度关系曲线Fig.4 Sensitivity curve between the initial power and the corresponding position with different particle radius
观察图4中微粒半径为5μm的曲线,当内腔光阱中的初始功率为0时,加速度计的测量灵敏度最高可以达到50.2mW/g。随着功率逐渐增大,灵敏度急剧减小。当初始功率增大到20mW以上时,灵敏度仍随功率减小,但曲线的斜率逐渐趋于平缓。这说明当内腔光阱的初始功率大于20mW时,加速度测量的线性范围较大。综合考虑系统的灵敏度和线性范围后,可通过控制671nm激光器令系统初始功率保持在58.7mW附近(见图3),此时加速度测量灵敏度为8mW/g,加速度测量范围最大可达到±5g。
同时,图4还对不同半径下灵敏度与初始功率的关系进行了分析。由图可得,在不同半径情况下,加速度测量灵敏度均随着初始功率的增大而降低,各组曲线的变化趋势基本相同。而随着半径的增大,灵敏度随之大幅提升,其主要原因是微粒质量与其半径的三次方成正比。因此,适当增大微粒尺寸可提升加速度测量灵敏度。
4 结论
内腔光阱是一种具有自反馈特性的新型光镊,可将微粒的位移转化为激光功率输出。通过该特性建立了一套加速度测量系统,用激光功率与加速度的对应关系进行加速度传感,可使用高频光电探测器作为信号输出源,实现GHz量级的信号采集。
1)本文分析了内腔光阱加速度测量曲线,提出了通过671nm激光改变加速度测量的工作点,以解决加速度测量无法分辨加速度方向的问题。
2)分析了加速度测量系统的灵敏度与工作点选取的关系。对于把半径为5μm的微粒作为检测质量的加速度测量系统,其最高灵敏度可达50.2mW/g。当工作点设置为初始功率58.7mW时,加速度测量灵敏度为8mW/g,加速度最大测量范围可达±5g。
3)通过增大光阱中微粒的尺寸,可以提高加速度测量系统的灵敏度。
