智慧博物馆视阈下室内定位的技术方法探析
2021-07-27杨超

摘 要 室内定位技术在智慧博物馆的智能库房管理、智慧展厅导览、观众精准画像与分析等领域起着基础且核心的作用。本文梳理了室内定位技术的发展现状,归纳了主流室内定位技术分类及对比,分析了智慧博物馆室内定位的内涵,着重对博物馆观众“人”的室内定位进行了需求梳理,重点分析与阐述了适用于博物馆“人”的室内定位之技术,即蓝牙信标+地磁+PDR的多模态融合定位技术,最后结合实际测试验证了所选技术方法的可行性,以期为智慧博物馆室内定位方案提供参考和借鉴。
关键词 智慧博物馆 室内定位技术 定位方法探析
0 引言
当下,定位及导航服务已深入人心。相较于室外导航,人们70%-80%的时间均处于室内[1],对室内定位的需求日益紧迫,尤其随着“博物馆热”的持续升温,观众面对博物馆这样一个陌生的大型室内空间时更是如此。传统的标识牌指引已显落伍,先进室内定位技术的运用无疑对博物馆观众的参观、导览乃至大数据分析都具有重要的意义。而在智慧博物馆的时代背景和建设框架下,博物馆对室内定位技术提出了更高要求:在广度上,由物的定位(如藏品定位)扩充到人的定位(如观众定位),且更加着重于人的定位数据感知;在深度上,定位的精度标准不断提高,定位数据的融合日益深入,定位信息的交互更加多元互通,定位应用范围日渐广泛。室内定位技术在智慧博物馆的智能导览、智慧展厅、观众精准画像与分析等诸多领域起着基础且核心的作用。
1 室内定位技术的发展现状、分类及方法
顾名思义,室内定位是相对于室外定位而言的。室外定位最常见的是全球卫星定位系统和移动运营商的基站定位技术。移动互联网时代,在内置GPS的移动设备迅速普及的背景下,基于卫星导航系统的室外定位早已成熟和规模化应用,如:谷歌地图、Here地图及国内的百度地图等,给人们带来了极大便利。然而,人们大部分时间处于室内,随着定位更加精细化和个性化,室内定位需求日益迫切。但在室内环境中,全球卫星导航系统易受到建筑物的遮挡和多径效应的影响[2],信号精度会急剧下降;移动通信基站定位技术本身的精度误差比卫星导航更大,亦不能满足更高的定位需求。因此,专门针对室内定位技术方法的研究与应用得到迅猛发展。
室内定位一般是指使用蓝牙、红外、Wi-Fi、RFID、超声波等单一或综合技术及其应用系统,以此提供位置服务(LBS),实现室内人员和物品的精准物理空间的感知定位。1993年,西门子公司研制了红外定位系统,可实现冶金工业机械设备的准确定位。1996年,美国联邦通信委员会(Federal Communications Commission,FCC)制定了E-911[3]定位标准,有力推动了室内定位技术的发展。2003年Anastasi G等人[4]使用蓝牙技术开发了BIPS定位系统,建立了一种室内定位的服务框架。2012年,Google公司在谷歌地图中采用了Wi-Fi室内定位技术和室内地图,仅一年就已在北美和欧洲一万多家大型场馆中应用[5]。伴随着物联网热潮,RFID定位逐渐兴起,贝频公司利用无线射频和低频定位的RFID技术,开发了RFID区域人员智能定位系统,实现了对人员自动识别和区域性定位。在博物馆室内定位方面,徐方[6]等人设计了一种基于Wi-Fi的博物馆观众实时定位系统,位置精度可达厘米级,时间精度可达皮秒级。叶子[7]针对博物馆现有导览系统现状,提出了一种综合性的室内定位方法,在此基础上研究并开发了基于Android的博物馆移动导览系统,实现了综合性室内定位、数字化集成展示及信息共享等功能,帮助用户在博物馆内实现自助导览。
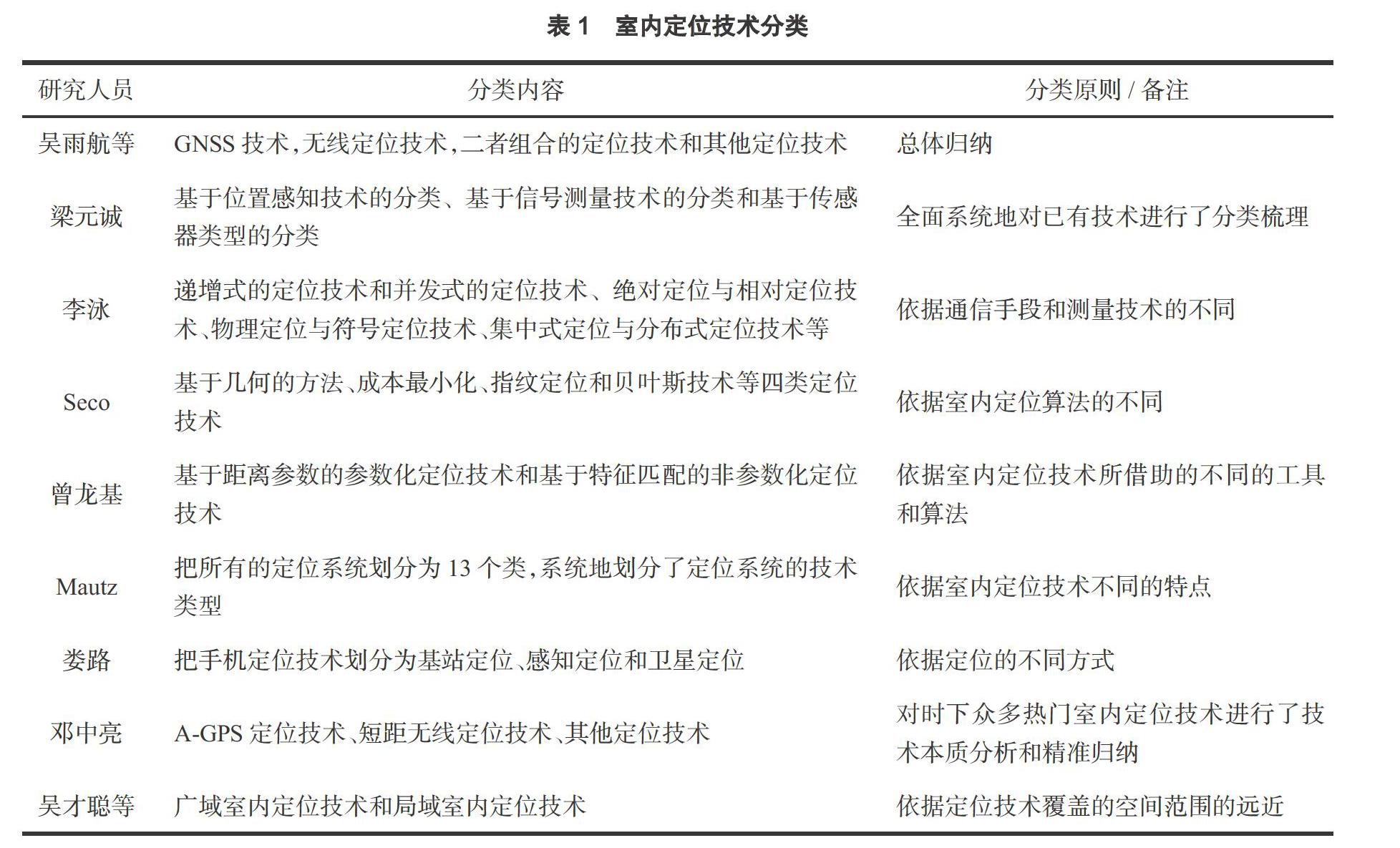
室内定位技术的分类对厘清室内定位技术的发展沿革乃至未来发展趋势具有重要的作用。Hightower和Borriello在2001年就提出了室内定位的分类体系以帮助位置服务开发者在选择室内定位系统时更好地评估定位性能[8]。此后,众多研究者和技术人员依据技术不同的发展时期,分别从不同的角度提出了室内定位技术的具体分类(表1)。
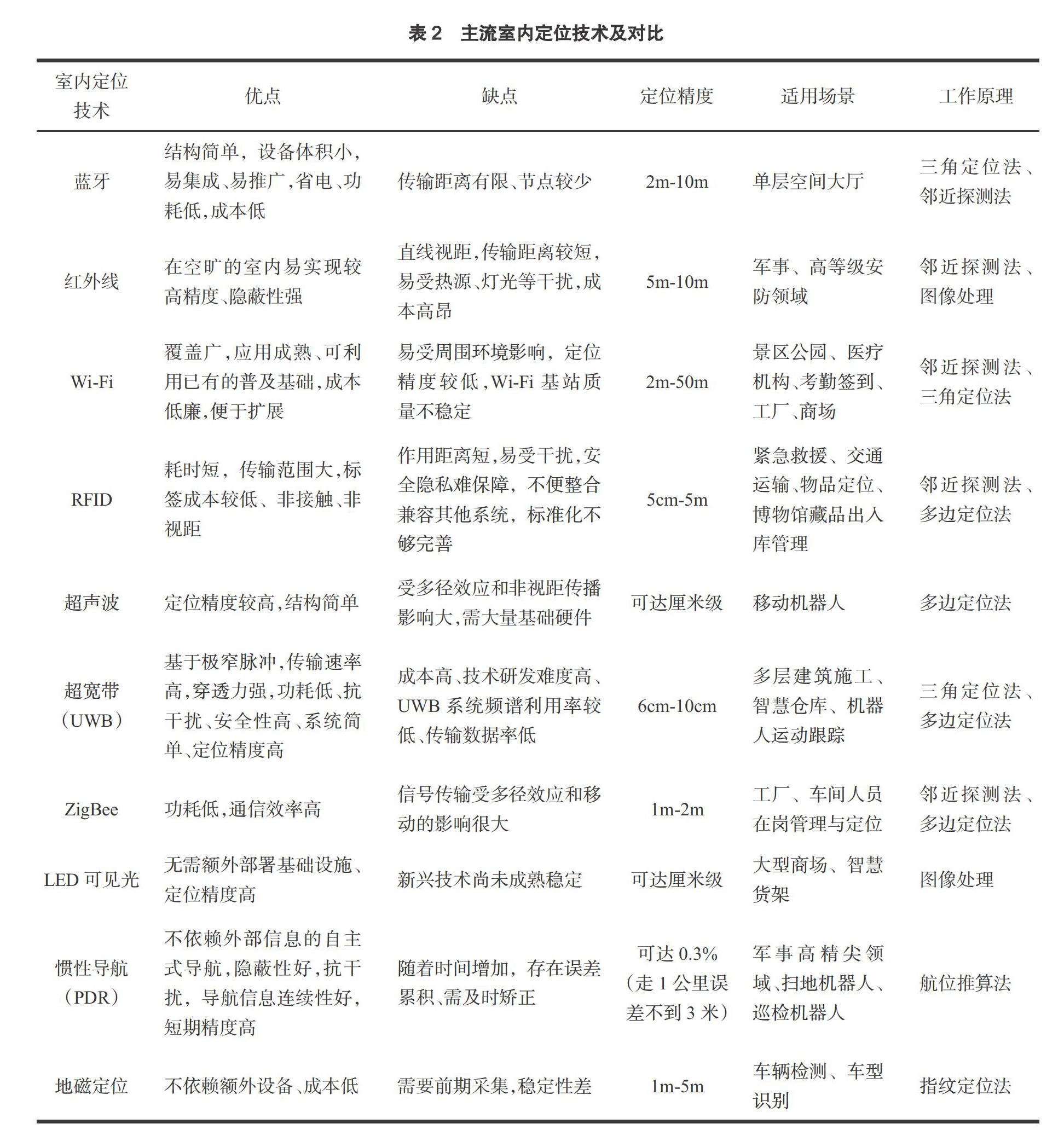
相信随着室内定位技术的快速发展与应用,更多的定位方法会被提出,相应的分类标准也在不断完善[9]。目前常用的室内定位技术既有传统的经典技术,也有层出不穷的新技术。这些室内定位技术采用的工作原理主要有邻近探测法、质心定位法、多边定位法、三角定位法、极点法、指纹定位法和航位推算法[10]等。主流室内定位技术及对比见表2。
2 智慧博物馆室内定位技术方法探析
传统的博物馆室内定位较多局限于“物”的定位,如藏品的位移定位与出入库管理、柜架定位、运行设备的定位以及其他相关物的定位等,而智慧博物馆遵循“以人为本”的“物、人、数据”动态双向多元信息传递模式[11],在智慧博物馆的视阈下,室内定位的内容不仅包括“物”的定位,且更加注重于“人”的定位和定位“数据”的应用。其中,“人”的定位包括馆内工作人员的定位、来馆参观观众的定位以及其他人员的定位。博物馆空间错综复杂,人们难以快速获知自身所处的位置和周边状况,因此对博物馆周边室外以及室内空间的定位需求日渐迫切,对定位精度和响应速度的要求也越來越高。数据,毋庸置疑发挥着赋能博物馆“智慧”的支撑性关键性作用。在智慧博物馆中,数据的一个重要来源即直接仰赖于室内定位等智能感知技术设备的采集,定位“数据”可直接服务于博物馆突发事件处理、应急响应等馆内管理,更可用于分析观众行为、描绘观众画像、科学评价展览效果、开展智能导览、监控库房安全、开展智慧库房管理等诸多应用场景。
相较于传统的“物”的定位,智慧博物馆更注重“人”的定位尤其是观众的室内定位,针对博物馆观众开展室内定位可直接提升观展体验、服务参观需求,继而大幅提高博物馆服务水平,同时可为博物馆累积大量用户基础数据、为后续进行个性化信息发布推送乃至办展提供重要参考。针对观众的博物馆室内定位需求可以分为导航、导视和导览三大类,具体描述见表3。
在导航定位方面,智慧博物馆致力于实现“室内室外一张图”的无缝链接。要实现定位系统“全流程、全覆盖、高可靠、高精度”的建设目标并保证实时连续定位,在具体建设层面就要依据博物馆的室内与室外多种环境和时空区域的特点,在不同的时间和空间维度考虑采用不同的定位技术。同时,通过对国内外室内定位的方法理论分析和实践现状的调研可知,单纯运用某一种室内定位技术,在响应时效、适用范围、定位精度、投入成本等方面难以兼顾,定位效率和质量不理想,或精度高但性价比低,或结构简单但精度低,不一而足,无法满足复杂区域、多变环境下的要求;融合了两种技术的室内定位系统相比单一定位技术,在定位精度和稳定性方面虽然有了一定提高,且也初步具备了基础服务能力、可以依托定位系统部署应用层高阶服务,但距离智慧博物馆全流程、全方位覆盖的目标还存在一定差距。因此,针对博物馆不同的复杂室内环境,灵活综合运用多种多模态(三种及以上)的定位技术势在必行:多种定位技术的综合运用,可扬长避短,克服单一技术弊端,实现优势互补,取得最优效果。如红外技术与超声波技术结合使用,克服了物体阻隔的缺点、提升了定位效果;蓝牙技术结合地磁等技术,无需过多的环境部署,在降低成本的同时提升了定位精度。
博物馆周边的室外定位,可使用已有的成熟卫星导航系统(如北斗、GPS)。在室内定位方面,博物馆最重要的产品就是展览,作为提供这一功能承载地的展厅,无疑占据了博物馆公共开放区域的较大面积,同时针对博物馆观众“人”的定位更多也是围绕展厅进行,由此针对展厅的室内定位成为重中之重。而展厅布局通常复杂精细,乃至同一展厅的内部布局均有所不同,加之博物馆其它各类空间结构不一、通道走廊交叉分布,需要更适合博物馆的室内定位技术和更高的定位精度来分辨不同的环境特征。此外,博物馆室内定位的场景在多样化的同时也呈现出碎片化特征,在实际建设中要综合考量室内定位技术的覆盖范围、成本、定位精度、可靠性、功耗、响应时间和可扩展性等诸多因素。
如前所述,目前主流的室内定位技术中,红外技术已显陈旧,不符合智慧博物馆对新技术应用的要求,同时受博物馆展厅灯光热源的影响大,且定位成本较高,实际应用中存在一定局限性;超声波技术定位范围有限,设备成本较高,仅适用于特定环境下的室内定位;LED可见光技术属于还未走向成熟稳定的应用;超宽带技术成本高昂、研发难度大,性价比较低,对于非盈利、公益性的博物馆而言负担较重,现阶段亦不现实;RFID电子标签更多地适用于“物”的定位,如藏品出入库管理等,针对博物馆观众“人”的定位稍逊一筹;ZigBee技术的信号受移动和多径效应的影响很大,且定位精度取决于信号源密度、信道材料质量和算法的准确性,造成欲达到较高的精度所耗费成本较高,软件完善空间较大。经综合衡量,博物馆室内采用蓝牙信标+惯性导航+地磁的无缝多模融合定位方式较为适宜,原因如下:
惯性导航技术(PDR)属高精度导航定位,同时可全天候工作、不受外部环境影响而自主导航,抗干扰好,常应用于高精尖军事领域如火箭和导弹的精确制导等,在军事装备技术中占据着重要地位。顶尖军工品质的背书,加上其技术早已成熟穩定,使得PDR在商用民用定位领域一直深受青睐,如在扫地机器人等领域,PDR已经得到大量商用,方案较为成熟。近年来,随着智能手机的普及和微机电系统的发展,基于智能手机的惯性导航逐渐成为研究和应用的热点,也为惯性导航实现大规模民用铺垫了坚实基础。在现实应用领域,由于GPS等卫星导航系统在地下、城市高架下、高楼林立处、室内和隧道等场所信号微弱、误差增大,基本不可采信,一般均采用惯性导航技术来实现上述场所的导航定位,实践应用广泛成熟。但惯性导航自身也存在缺点,如长期精度较差,误差会随着时间累积、需及时矫正等。在实际应用中,常采用蓝牙信标与PDR结合以修正定位参数,这是因为:得益于智能手机的迅速发展和蓝牙设备的生产制造成本越来越低,使得基于蓝牙技术的室内定位系统建设成本相对低廉、使用较为方便,这就为其大规模推广应用提供了良好的基础[12],蓝牙低功耗、低成本,而相比之下,Wi-Fi组合定位成本高[13],定位精度易受外界环境的影响。同时,蓝牙定位基站是远距离基站,适合博物馆大环境、大场景的空旷展厅和公共空间安装。此外,在蓝牙与PDR组合定位应用方面,有较多理论算法和实践案例,如韩琪[14]基于智能手机平台设计出一种蓝牙与PDR融合的定位与轨迹跟踪算法,并经实测,该融合定位算法比单一的PDR算法误差降低39%;赵菲[15]提出了蓝牙和PDR相结合的室内组合定位方案,利用融合算法启动测量更新和状态更新的迭代计算,更新参数,实现组合定位,实测显示组合定位方案适合长距离和长时间的定位,具有可行性。同时,为适应博物馆不同条件下的复杂空间环境,实现精确的实时连续定位,增强数据感知和采集力度,从不同技术维度反复矫正定位参数消弭误差,适应智慧博物馆对定位精度的高要求,可采用地磁技术和PDR+蓝牙构建多模态(三模)融合定位系统。地磁定位利用地球磁场强度在每个位置的唯一性和磁场被建筑材料(金属结构)扰动扭曲造成室内小磁场的差异性原理来实现准确室内定位功能,优势在于成本低廉、无需购置和部署额外硬件,仅仅使用内置有地磁传感器的智能手机即可实现定位,成本很低,精度可靠。但地磁定位获取的是相对位置,单靠它自身无法立刻获取初始位置,通常采取其它定位技术(如PDR/蓝牙/Wi-Fi)来辅助获取初始位置,同时,地磁定位的误差不会随着时间的增加而产生累积效应,非常适合与惯性导航系统进行数据融合,可对惯性器件产生的累积误差进行及时的修正,构成的组合定位系统性价比较高。蓝牙信标+惯性导航+地磁的多模态融合定位技术组合,仅蓝牙信标需部署设备基站,其余均无需部署额外硬件,为公益性质博物馆降低了成本,而在此基础上又尽可能地提高了室内定位精度,这无疑较符合博物馆室内定位的需要。该技术组合基于多模基站网络,采用多种传感器计算和蓝牙定位计算组合式定位算法,利用基站信号定位获取绝对位置信息,减小PDR定位累积误差,实时校准当前位置,保证室内定位的准确性和稳定性。在采用上述多模态融合定位技术的同时,配合博物馆官方APP和微信小程序的使用,可为观众参观提供更全面更精准的到馆指引、馆内空间导视、参观路径导航、基于精确位置的内容推送导览等智慧化服务。
基于蓝牙信标+惯性导航+地磁的无缝多模融合定位技术构建的博物馆室内定位系统服务主要分为两方面:一是离线训练定位模型,二是在线实时定位服务。在数据采集及训练阶段,采集功能主要实现空间环境信息和观众行为信息的采集,图1为地磁数据采集示意图,可选择待采样的楼宇和区域,提前规划采样路径,沿采样路径匀速行走,采集无线信号和地磁信息,采样器自动收集传感器数据,客户端软件按标准数据格式将符合定位要求的采样文件数据上传到定位训练服务器进行数据模型训练,得出定位模型。在融合实时定位服务阶段,客户端持续不断地将采集到的无线信号、蓝牙信号、地磁数据、方向信息和运动状态等信息发送到系统服务器,服务器将根据观众状态进行决策,融合多源信息,返回高精度定位结果并进行输出。博物馆室内定位系统提供地图基础服务,服务引擎通过构建“室内室外一张图”的基础地图数据拓扑结构,提供网络分析、地图交互操作等功能来支撑博物馆的室内定位,针对博物馆内各层展厅等指定区域进行电子地图绘制与标记,包括加载地图、设定轨迹路线等,如图2。
多模态融合定位技术既可以克服单一技术的劣势,又能满足各种复杂室内环境定位和基于位置的应用需求,同时可依据不同环境灵活采用与之相契合的定位技术。从数学角度看,单一传感器的测量值组成一个测量子空间,而多传感器融合则是各测量子空间按照一定的法则向信息融合空间投影[16];根据系统模型及传感器的噪声的统计特性假设,将观测数据映射到状态矢量空间,如位置、速度、角速度、姿态和传感器误差量等,多传感器信息融合会根据观测数据给出一个关于状态的最优估计量[17]。
针对上述蓝牙信标+惯性导航+地磁的多模态融合定位技术,我们进行了博物馆环境的实际测试。测试地点选择在博物馆s3展厅,首先需布设相关蓝牙信标设备,由于设备的位置和数量直接关乎定位精度,按照测算分析的结果尽可能合理地布置一定量设备,对多模基站进行了参数设置和信号检测调试,查看当前PDR参数计算后的信息以及周边定位基站的信息来验证定位精度,根据移动端的定位数据回传和引擎定位坐标计算,查看定位日志,完成参数调优;其次规划了单人测试既定路线和各个初始卡位点,同时也进行了多人的“观众”点位测试准备。测试开始后,工作人员手持智能手机移动端先按照既定规划路径匀速行走,而后多名工作人员散布在展厅内进行来回走动位移,数据采集功能模块支持使用地磁指纹采集,采样器自动收集传感器数据,将采样文件上传到训练服务器。据此得到相应测试数据,而后计算出测试数据和最初规划的各点位置坐标的误差值。测试结果显示,基于蓝牙信标+惯性导航+地磁的多模态融合定位技术的室内定位精度结果分布如下:0-3m(比例大于70.00%);0-5m(比例大于96.00%),精度已基本达到智慧博物馆室内定位要求。测试证明上述多模态融合定位技术组合能够满足博物馆室内定位需求,且适合博物馆大空间的长距离长时间定位,技术稳定,具备在博物馆实际应用的可行性(见图3)。
3 结语
纵观室内定位技术的发展,单一技术已不适应越来越复杂的实际定位需求,多模态多技术的融合组合方案日益成为室内定位市场的主角和趋势。不断研发新型定位技术并实现其规模化商用、针对现有某一技术进行升级迭代以适应新环境和高要求、多模态多技术组合的不断融合和探索优化,成为室内定位技术的未来发展大方向。
室内定位技术在智慧博物馆建设中的精准应用,不仅可直接助力观众参观导览及其行为分析,由此采集到的数据通过深入挖掘与机器学习等人工智能技术,实现自动化数据治理,并可与智慧博物馆数据中台融合,下沉为数据资产,可进一步分析设备定位、人员定位和物品定位之间的关联性,结合上层应用系统支持可辅助博物馆运营决策,如为重要展览活动提供科学有效的限流措施依据、突发事件定位预警及应急响应等,进而有力提升博物馆服务与管理的智慧化水平。在此过程中,室内定位技术及系统为博物馆的智慧化赋能,同时亦彰显出室内定位在智慧博物馆体系中的基础与核心作用。
参考文献
[1]关于室内定位的全面解析[EB/OL].2019-09-05.https://www.sohu.com/a/338881274_427951,(2020-12-05).
[2]宋欣.多传感融合的室内定位技术研究[D].上海:上海交通大学,2013.
[3]Wang S S, Green M, Malkawa M. E-911 location standards and location commercial services: Emerging Technologies Symposium: Broadband, Wireless Internet ccess, 2000 IEEE, 2000[R]. IEEE. pp.1-5.
[4]Anastasi G, Bandelloni R, Conti M,Delmastro F, Gregori E, and Mainetto G. Experimenting an Indoor Bluetooth-based Positioning Service. Proceedings. 23rd International Conference on Distributed Computing Systems Workshops, 2003.
[5]劉经南,郭迟,彭瑞卿.移动互联网时代的位置服务[J].中国计算机学会通讯,2011,12(7):40-50.
[6]徐方,施智勇,鲍贤清.博物馆环境中基于Wi-Fi的实时定位系统设计[J].科学教育与博物馆,2019(2):146-150.
[7]叶子.博物馆移动导览中的综合性室内定位方法研究及系统实现[D].浙江大学,2015.
[8]Hightower J, Borriello G. Location systems for ubiquitous computing[J]. Computer, 2001, 34(8): 57-66.
[9]阮陵,張翎,许越,郑星雨.室内定位:分类、方法与应用综述[J].地理信息世界,2015(4):11.
[10]常见几种室内定位系统与原理概述[EB/OL].(2018-03- 06).http://news.rfidworld.com.cn/2018_03/487a8e05ea552cd 9.html,(2021-1-06).
[11]宋新潮.智慧博物馆的体系建设[J].中国博物馆通讯,2015(1):2.
[12]李远雷.基于Android平台蓝牙4.0技术的博物馆室内定位系统设计与实现[D].西安电子科技大学,2017.
[13]赵菲.基于蓝牙和PDR结合的室内定位方法研究[J].无线互联科技,2018(8):17.
[14]韩琪.基于蓝牙与PDR融合的智能手机室内定位与跟踪算法研究[D].杭州电子科技大学,2016.
[15]赵菲.基于蓝牙和PDR结合的室内定位方法研究[J].无线互联科技,2018(8):17.
[16][17]许丽佳.组合导航系统中的信息融合研究[D].北京工业大学,2004.
作者简介:杨超(1985—),男,主要研究方向为信息管理及博物馆信息化,E-mail:scyc163@163.com。
Analysis of indoor positioning technology in the perspective of Smarter Museum// Yang Chao
Author's Address National Museum of China, E-mail: scyc163@163.com
Abstract Indoor positioning technology plays a basic and core role in intelligent warehouse management, intelligent exhibition hall guidance, audience analysis and accurate portrait in the perspective of Smarter Museum. Firstly, this paper summarizes the development status of indoor positioning technology, summarizes the classification and comparison of mainstream indoor positioning technology, analyzes the connotation of indoor positioning of Smarter Museum, combs the indoor positioning needs of museum audience, and focuses on the indoor positioning technology suitable for Museum, that is, Bluetooth beacon + geomagnetic + PDR multimodal fusion positioning technology, Finally, the feasibility of the selected technology is verified by the actual test, in order to provide reference for the indoor positioning scheme of the Smarter Museum.
Keywords Smarter Museum, Indoor positioning technology, Analysis of positioning method