基于合成运动的Delta机器人轨迹规划
2021-07-25刘现伟颉潭成徐彦伟王亚南
刘现伟,颉潭成,徐彦伟,王亚南
(河南科技大学 机电工程学院,洛阳 471003)
0 引言
Delta机器人具有定位精度高、承载能力强、运行速度快等优点,被广泛应用于流水包装线上,完成大批量、重复性的快速分拣、抓取等拾放操作[1]。
轨迹规划直接影响Delta机器人在分拣、抓取作业时的运动平滑性和稳定性。在拾放操作中,常用门型轨迹作为抓取-放置动作,由于门型轨迹在竖直与水平方向上存在直角过渡,在高速运行时会产生机械振动现象。而合理规划运动轨迹[2]能够减少振动,延长机构的使用寿命,这对于制造业的发展具有重要意义。
国内外学者对Delta机器人在高速高频作业时的运动轨迹和运动规律进行了广泛而深入的研究。天津大学的张利敏[3]研究表明,机器人末端的运动轨迹直接影响机构的动态精度。张祥[4]提出一种基于修正梯形运动规律的弧线轨迹规划方法,该方法能够减小直角处的冲击,可使门型轨迹过渡部分更加平滑。苏婷婷[5]等提出一种基于毕达哥拉斯速端曲线的轨迹规划方法,可使轨迹平滑且运动平稳。解则晓[6]提出一种基于Lamé曲线的轨迹规划方法,在减小运动过程中机械手残余振动方面效果良好。丛明[7]等提出一种基于凸轮运动曲线的椭圆路径,能有效减小对关节空间的冲击,缩短机器人的拾取时间。上述研究成果多从直角过渡部分优化门型轨迹,以提高直角坐标空间和关节坐标空间的平稳性能。
基于合成运动的圆弧轨迹在时间分配上比门型轨迹更有优势,能大大降低角加速度和末端加速度的峰值,提高运动的平稳性,减少机构的振动,查阅相关文献,基于合成运动的Delta机器人轨迹规划研究内容相对较少。基于此,本文在约束运动周期的前提下,研究了一种基于合成运动的Delta机器人轨迹规划方法,使Delta机器人在运动过程中,在关节和直角坐标空间都具有较好的运动性能,进而减少机构的振动,延长使用寿命。
1 运动轨迹规划
为完成拾放操作的任务,需对机器人末端运动轨迹进行规划。则设定运动轨迹的三个关键点:起始点、末端点和避障最高点。Delta机器人在拾放作业时常使用门型轨迹,如图1所示。设定运动方向为:A→B→C→D→E,水平距离|AE|=l,竖直距离|AB|=|DE|=h。在常规门型轨迹中l>h,则可由劣弧完成拾放作业。
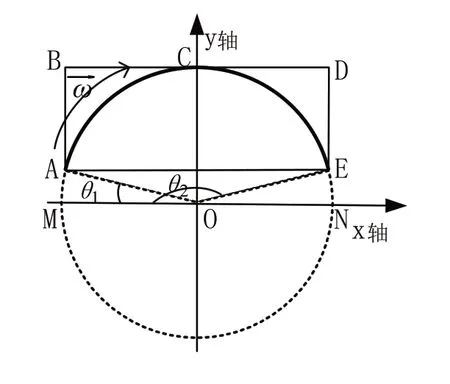
图1 圆弧型拾放操作轨迹
1.1 基于合成运动的圆弧轨迹规划

式中,τ∈[0,1],T为运动周期。
因圆周运动在x轴与y轴方向上是关于参数θ的正余弦函数,为使圆周运动的速度、加速度达到轨迹规划的条件,将参数θ规划为关于时间t的3-4-5次多项式,由圆的参数方程与多项式运动规律,得x轴与y轴方向上分运动复合公式:

式中t∈[0,T],θ(t)为3-4-5次多项式,T为运动周期,(a,b)为圆心坐标,r为圆的半径。在运动过程中,由合成运动规律,在竖直方向与水平方向运动的时间均为运动周期T。
1.2 基于梯形加速度的门型轨迹规划
在加减速运动规律中使用较多的是S形加减速模型,本文采用七段S形加减速运动规律作为对比,速度、加速度的曲线如图2所示。七段S形加减速的加速度推导公式可参考文献[12,13]。
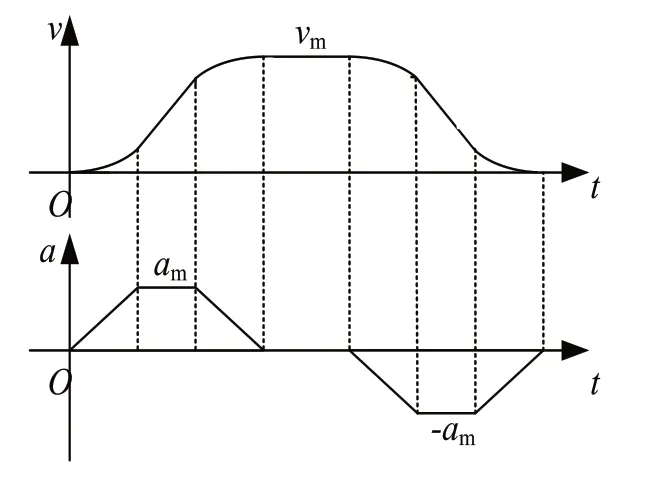
图2 S形加减速曲线图
在该轨迹规划方法中,机器人在拾放操作运动轨迹的水平和竖直方向均采用七段S形加减速运动规律。设机器人的拾放操作周期为T,竖直上升阶段的时间为T1,水平运动阶段的时间为T2,竖直下降阶段的时间为T3,各个阶段运动时间按照各段轨迹的长度进行分配。
2 仿真与分析
仿真实验时,设图1中门型轨迹A、B、C、D、E各点的坐标依次为A(-141.36,0,-400),B(-141.36,0,-310),C(0,0,-310),D(141.36,0,-310),E(141.36,0,-310)。用MATLAB软件中Simmechanics模块对基于合成运动的圆弧轨迹规划方法和基于梯形加速度的门型轨迹规划方法进行了仿真对比分析,得到机器人末端的轨迹曲线,如图3所示。该Delta机器人的特性参数如表1所示。

表1 Delta 机器人参数

图3 运动轨迹图
2.1 关节坐标空间轨迹运动特性
通过仿真,得到了Delta机器人在运动过程中关节坐标空间中的角位移、角速度、角加速度曲线。在基于梯形加速度的门型轨迹规划方法下,角位移曲线如图4(a)所示,角速度曲线如图5(a)所示,角加速度如图6(a)所示。在基于合成运动的圆弧轨迹规划方法下,角位移曲线如图4(b)所示,角速度曲线如图5(b)所示,角加速度如图6(b)所示。

图4 角位移曲线

图5 角速度曲线
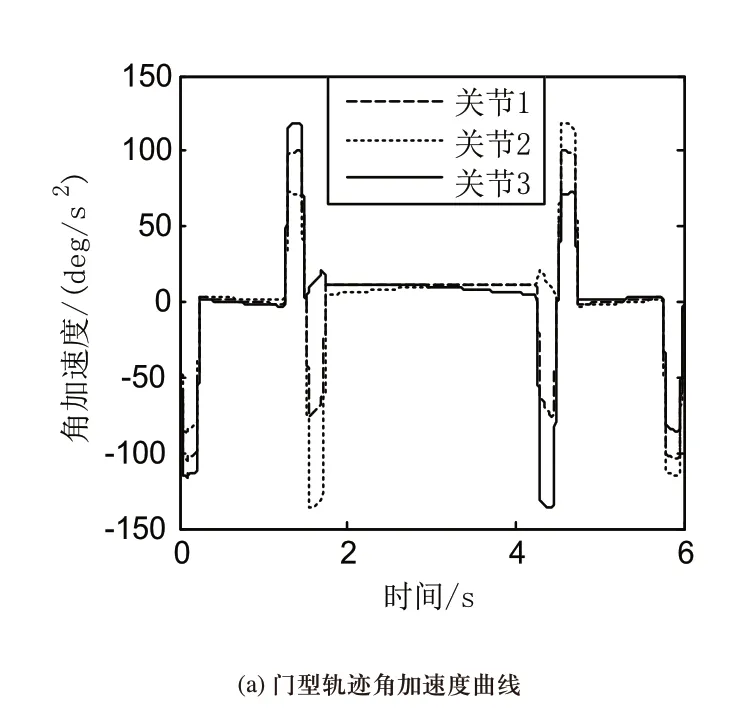

图6 角加速度曲线
由图4角位移曲线得,门型轨迹的角位移曲线存在波动现象,而圆弧型轨迹在角位移空间的曲线更加平滑,自然。并且合成圆形轨迹的整体角位移区间范围比门型轨迹的角位移区间范围减少13%左右。由图5角速度曲线得,门型轨迹的角速度的峰值与合成圆弧轨迹的角速度峰值相差不大,但门型轨迹的角速度曲线存在尖点,角速度的变化趋势较为剧烈,而圆弧轨迹的角速度曲线较为平滑,曲线的变化趋势较为缓和、流畅。由图6角加速度曲线得,门型轨迹的角加速度曲线变化较为剧烈,存在较多尖点,并且峰值较大,存在较多的加减速过程,会对电机造成冲击,影响其使用寿命。而圆弧轨迹的角加速度曲线平滑流畅,不存在尖点。由表2电机状态数据对比可得,圆弧轨迹中1轴与2轴的角速度峰值比门型轨迹的有所减少,3轴的角速度峰值比门型轨迹的有所增加,总体来说,圆弧轨迹与门型轨迹的角速度峰值相差不大。而圆弧轨迹的角加速度峰值比门型轨迹的角加速度峰值减少了60%左右,并且圆弧轨迹的角加速度曲线光滑,无突变,无柔性冲击,峰值较小。

表2 电机运动状态对比
2.2 直角坐标空间轨迹运动特性
由仿真得到基于梯形加速度的门型轨迹规划方法下的末端速度、加速度曲线,如图7(a)、图8(a)所示。基于合成运动的圆弧轨迹规划方法下的末端速度、加速度曲线,如图7(b)、图8(b)所示。
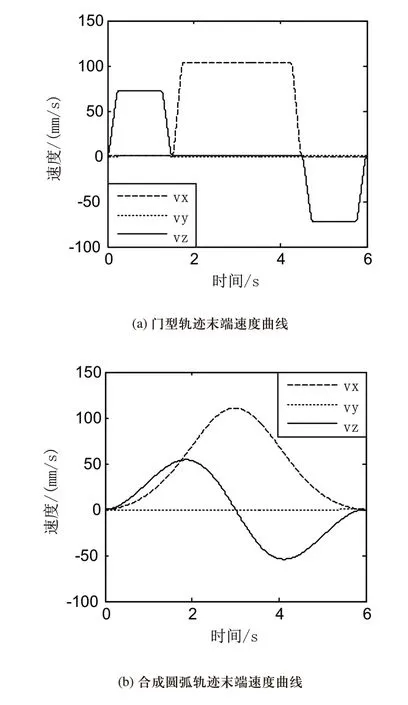
图7 末端速度曲线
由图7末端速度曲线得,门型轨迹的速度峰值与圆弧型轨迹的速度峰值相差不大,相比较而言,圆弧轨迹的速度曲线更加平滑,没有尖点出现,有着较好的运动特性。由图8末端加速度曲线得,门型轨迹的加速度曲线存在较多的尖点,并且要经过多次的加减速过程,存在较多的柔性冲击。而圆弧轨迹的加速度曲线更流畅、平滑,无柔性冲击,加减速过程较少。由表3末端运动状态可得,在x轴方向上,圆弧轨迹的末端速度峰值比门型轨迹的速度峰值稍大,在z轴方向上,圆弧轨迹的速度峰值减少了20%左右。对比表3中的末端加速度峰值,在x轴与z轴方向上,圆弧轨迹的加速度的峰值比门型轨迹的加速度峰值减少了80%左右。通过仿真数据分析y方向的状态,圆弧轨迹在y轴方向上的速度峰值与加速度峰值都较小,说明圆弧轨迹在y轴方向上的抖动比门型轨迹的小。从整体来分析,圆弧轨迹能够大大减少机构的振动现象,使机器人运行平稳。

表3 末端运动状态对比

图8 末端加速度曲线
3 样机试验
为验证文中所规划的机器人运动轨迹的实际运动特性,搭建了如图9所示的Delta机器人实验平台,并进行验证分析。机器人控制器选用PMAC系列中的Turbo PMAC2-Eth-Lite控制器(又称“Clipper”),驱动器型号为A-SV15,伺服电机型号为60ST-M01930,减速机型号为PLX60-5,减速比为5:1。主动臂及动平台材料为铝合金,从动臂材料为碳纤维。数据采集系统用PMAC卡中的DPRAM数据采集缓冲区,采集的数据为2500线增量式编码器所反馈的实际脉冲数,采样频率为112.5Hz。

图9 Delta机器人实验平台
通过样机试验,采集电机运动过程中的实际脉冲数据,并将其转化为角度数值,得到门型轨迹的关节坐标空间曲线,如图10(a)、图11(a)和图12(a)所示,得到圆弧轨迹的关节坐标空间曲线,如图10(b)、图11(b)和图12(b)所示。对比分析关节坐标空间曲线可得,基于合成运动的圆弧轨迹的关节空间曲线比门型轨迹的更平滑,在实际试验过程中,基于合成运动的圆弧轨迹比门型轨迹的运动状态更平稳。

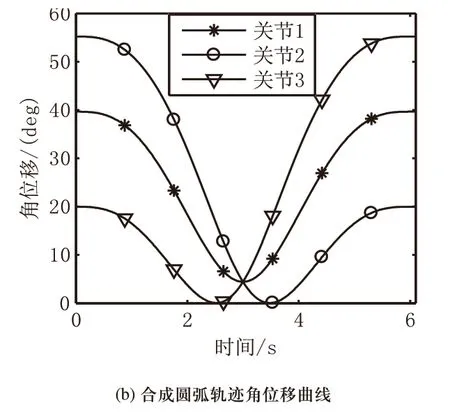
图10 角位移曲线
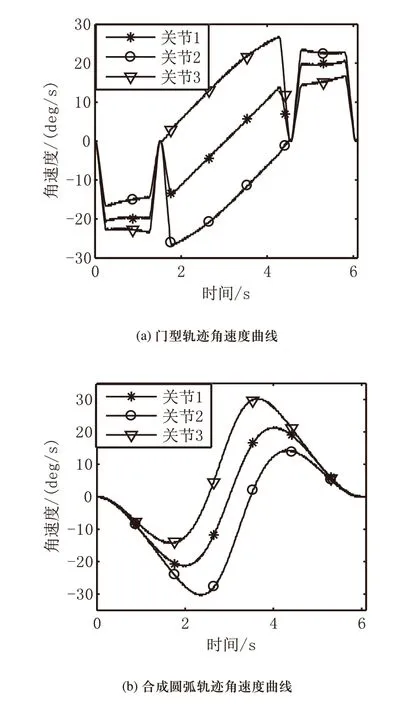
图11 角速度曲线


图12 角加速度曲线
4 结语
利用合成运动方法规划了Delta并联机器人的拾放操作轨迹,在约束拾放操作周期的前提下,分析了关节坐标空间与直角直角空间的运动特性曲线。研究结果表明:1)基于合成运动的圆弧型轨迹在水平与竖直方向上的运动时间均为拾放操作的周期,与基于梯形加速度的门型轨迹相比,其时间分配更有优势。另外合成运动不需要对运动轨迹进行分段处理,更易于实现运动算法的编写。2)合成圆弧轨迹可显著提高运动的平稳性,其在关节坐标空间与直角坐标空间的运动曲线光滑、连续、无尖点,具有更好的柔顺性。3)合成圆弧轨迹在关节坐标空间中与直角坐标空间的加速度峰值分别减少60%、80%左右,更有利于减小运动过程中的振动现象。
