基于全工况模型的自动紧急制动系统及其控制策略研究
2021-07-22杨杰君周艳辉欧阳智文健峰
王 全 ,杨杰君,周艳辉 ,欧阳智,文健峰,卢 雄
(1.长沙中车智驭新能源科技有限公司,湖南 长沙 410083;2.中车时代电动汽车股份有限公司,湖南 株洲 412007)
0 引言
随着社会经济的快速发展,汽车在我们出行生活中发挥重要作用,其保有量也逐年攀升。交通事故频发给整个社会、人类带来了巨大的经济损失和安全威胁。美国国家交通安全管理局明确指出,驾驶员操作失误引起的事故占所有交通事故中的90%,其中司机采取了制动措施但由于制动力不足而造成的事故约占49%,追尾碰撞中因驾驶员没有采取制动而造成的事故约占31%,制动过晚导致事故的情况约占20%,因此对交通安全的治理刻不容缓[1-2]。基于摄像头、雷达等先进传感器技术的自动紧急制动系统(advanced emergency braking system,AEBS)大大提高了汽车的主动安全性[3]。欧洲新车安全评鉴协会(Euro-NCAP)研究表明,在紧急工况下,搭载AEBS的车辆可以避免27%的碰撞事故[4]。因此,对于AEBS的相关研究得到广泛关注。
当前,AEBS的制动控制策略主要利用安全距离模型、安全时间模型及基于专家数据库的模糊控制模型对制动力进行控制[4]。典型的安全距离模型有Mazda 模型[5]、Honda 模型[6]和 Berkeley 模型[7],其主要用于分析在当前车辆状态下能及时避开障碍物所需保持的最小距离,但不能分析不同障碍物状态对最小制动距离的影响。安全时间模型用于实时计算当前车辆状态和与前车碰撞时间的关系,当实际碰撞时间小于预警/制动碰撞时间时,车辆进行预警或产生制动力;但设定固定碰撞时间的方式,无法明确界定制动减速度和安全时间阈值,容易引发频繁预警/制动动作,影响驾驶员的正常驾驶与舒适性[8]。文献[9]基于专家数据库的控制模型统计了一种不同驾驶员在不同紧急情况下的紧急制动方式,建立了基于经验的预警与制动力控制模型,但基于样本的方式无法真实地反映所有驾驶员的操作特性,因而无法满足驾驶员在不同车辆状态下的制动紧急程度要求。为此,本文提出了一种基于全工况的自动紧急制动系统控制模型,其使系统在满足碰撞评价规程的同时降低了预警/制动频率,并能有效避撞,提高了汽车的主动安全性能。
1 AEBS结构
本文所提AEBS主要包括感知层、决策层、执行层与交互层,系统结构如图1所示。
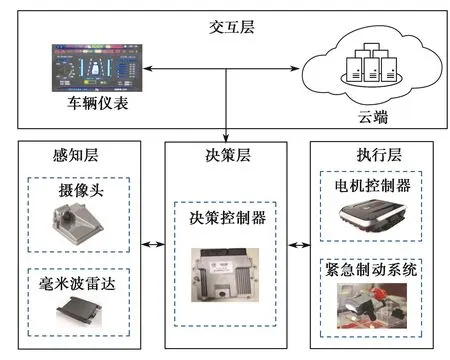
图1 自动紧急制动系统结构Fig. 1 Structure of the AEBS
感知层采用摄像头与雷达融合方案实现场景分析和车路信息探测,并将路况信息通过CAN总线发送给决策层。
决策层采用决策控制器作为自动紧急制动系统的决策装置,负责向感知层发送车身信号;同时,决策层通过分析前方存在的碰撞风险向执行层发送决策信息。
执行层由电机控制器和紧急制动系统构成,用于接收和响应决策控制器的驱动和制动信息,以实现车辆的电制动与气制动。
交互层由仪表和云平台构成。云平台实时存储系统的过程信息,实时显示系统的运行、停止或故障信息,与驾驶员进行信息互动,提供听觉、视觉两种方式的预警信息和制动信息。
AEBS从检测到危险障碍物到激活制动系统的作用过程如图2所示。

图2 自动紧急制动系统作用过程Fig. 2 Working process of the AEBS
2 AEBS制动控制策略
为了确保本车在AEBS制动过程中不与前车产生碰撞,系统所允许的最小制动开启距离应大于在制动条件下本车行驶的距离和前车行驶的制动距离之和。
本车允许的最小制动开启距离(图3)为

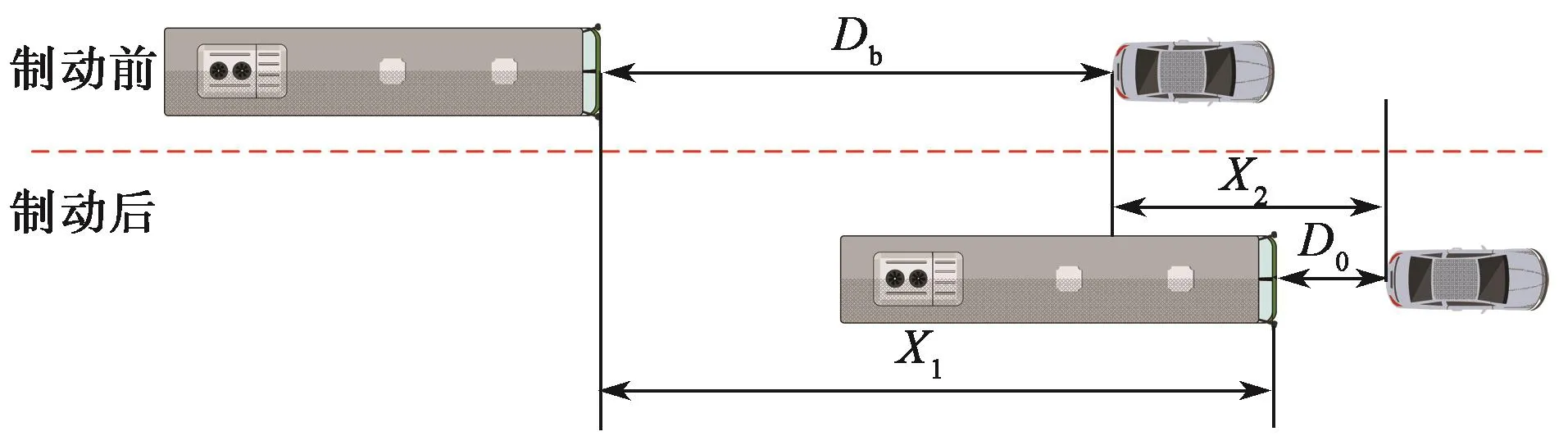
图3 安全距离模型Fig. 3 Safety distance model
式中:Db——本车允许的最小制动开启距离;X1——制动时本车行驶的距离;X2——制动时前车行驶的距离;D0——刹停时本车与前车的距离。
2.1 制动距离与安全时间估算模型
为考虑所有工况下发生追尾碰撞的可能,需要研究前车运动状态,得到在不同工况下的安全距离模型。本文将前车的运动状态分为匀速行驶、加速和减速3种。
2.1.1 前车静止
前车静止时,本车所允许的最小制动开启距离为初速度减速到停止时的行驶距离,即X2=0,则本车允许的最小制动开启距离Db如下:

式中:ts——制动加速度增长时间;v1——本车速度;a1——本车减速度。
2.1.2 前车匀速或加速
在前车匀速或加速工况下,Db必须是本车车速小于或等于前车速度时的距离方可有效避免发生碰撞,具体如下:

式中:vrel——前车车速。
2.1.3 前车减速
前车减速工况下,Db必须是本车车速小于或等于前车速度时的距离,具体如下:

式中:v2——前车车速;a2——前车加速度。
AEBS模型中,ts实质是电子制动系统制动力从0增加到设定值的时间,通常取ts= 0.6 s;根据当前传感器的特性并考虑到路面附着情况、天气等影响制动距离的因素,D0一般取2~3 m;a1根据车辆的动力学参数一般被设置在-4 ~ -8 m/s2之间,本文选a1= -6 m/s2。综上,可以得到最小允许的碰撞时间:

式中:vrel——本车与前车的相对速度。
2.2 预警与制动控制策略
在AEBS整体响应时间一定的前提下,预警与制动控制策略的安全性和舒适性存在矛盾。若预警与制动控制得过早,则容易影响驾驶员的操作体验和乘坐的舒适性;控制过晚,又无法有效避免碰撞事故的发生。同时,国家法规对预警和制动的时间点进行了严格的限制。根据标准JT/T 1242-2019《营运车辆自动紧急制动系统性能要求和测试规范》要求,在检测到碰撞发生时,系统应能给出至少两种等级的预警,其中紧急制动前1.4 s产生一级预警,紧急制动前0.8 s前产生二级预警。
在考虑舒适性与安全性的前提下,当前车辆与前方障碍物的碰撞时间为

式中:D——本车与前车的距离。当碰撞时间小于等于“最小允许的碰撞时间+1.4 s”,进行一级预警;当碰撞时间小于等于“最小允许的碰撞时间+0.8 s”,进行二级预警;当碰撞时间小于等于最小允许的碰撞时间,进行紧急制动。
紧急制动减速度是根据两车的相对速度和距离计算出的一个理论值,具体如下:

为提高制动的及时性和乘坐的舒适性,本文设计一个基于PI的制动力调节器,见式(8),其可对减速度进行平滑控制以确保制动时乘坐的舒适性。图4示出典型的PI调节器原理。

式中:a——PI调节后的减速度;Kp——比例环节调节系数;Ki——积分环节调节系数;Tsam——采样时间。
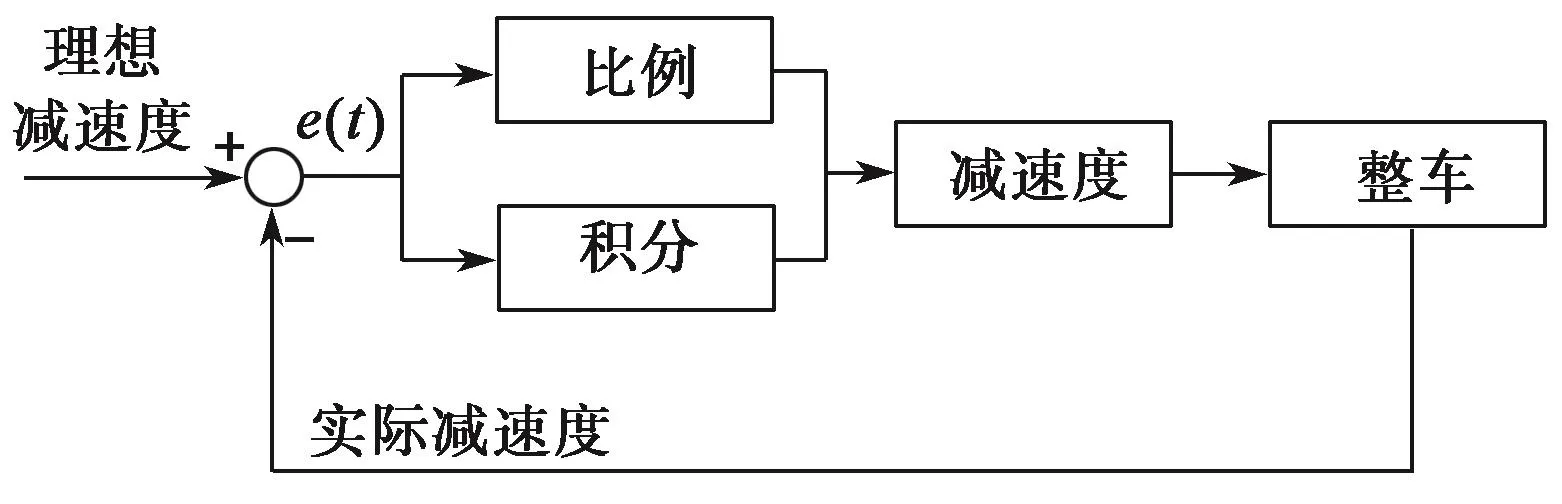
图4 典型的PI调节器框图Fig. 4 Black diagram of a typical PI controller
3 仿真与试验
为验证所提出的AEBS两级预警和紧急制动策略的可行性和有效性,根据标准JT/T 1242-2019要求,本文设定了法规中所描述的3个工况进行仿真测试和实车测试。测试内容包含匀速运行的本车对前方静止障碍物的碰撞测试、匀速运行的本车对匀速运行的前方障碍物的碰撞测试。
3.1 仿真验证
图5示出以80 km/h匀速运行的本车对前方以12 km/h匀速运动的障碍物的仿真碰撞试验数据。
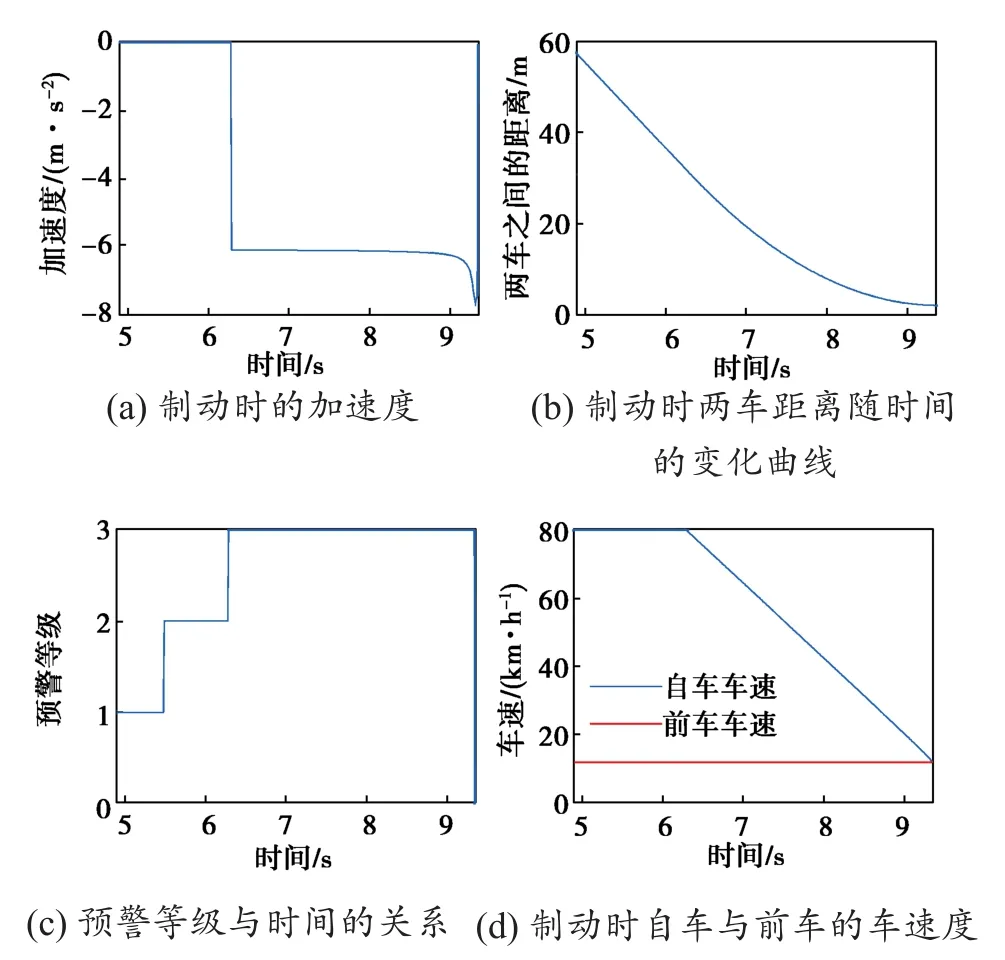
图5 本车(80 km/h)对前车(12 km/h)的碰撞测试Fig. 5 Collision test of the vehicle at 80 km/h against the front vehicle at 12 km/h
仿真时,主要关注仿真试验开始和结束时本车车速、前车车速、制动期间的减速度、两车距离以及报警时间等信息。可以看出,本车提前1.4 s进入一级预警,提前0.8 s进入二级预警;制动减速度在6~8 m/s2之间且制动维持了3 s左右;当系统检测到不可能发生碰撞即本车速度小于等于前车速度时,自动解除制动,避免了碰撞的发生。对各工况进行仿真的结果如表1所示。

表1 各工况的碰撞测试结果Tab. 1 Collision test results under various working conditions
3.2 JT/T1242测试工况验证
标准JT/T 1242要求对车辆进行3组场景测试(图6)。测试场景主要包含40 km/h匀速运行的本车对静止的前车、80 km/h匀速运行的本车对静止的前车、80 km/h匀速运行的本车对12 km/h匀速运行的前车这3种碰撞测试场景。

图6 实车测试场景Fig. 6 Vehicle test real scenario
3.2.1 40 km/h匀速运行的本车对静止的前车
设定两车相距200 m,本车以40 km/h匀速接近前方静止前车,其过程曲线如图7所示。可以看出,本车提前2.1 s进入一级预警,提前1.3 s进入二级预警;制动减速度在2~8 m/s2之间且制动维持了2.2.s左右;当车辆速度降为0 时,解除制动并与前车保持1.87 m的距离,避免了碰撞的发生。

图7 本车40 km/h对前车静止的碰撞测试Fig. 7 Collision test of the vehicle at 40 km/h against the front stationary vehicle
3.2.2 80 km/h运行的本车对静止的前车
设定两车相距200 m,本车以80 km/h匀速接近静止前车,其过程曲线如图8所示。可以看出,本车提前2.3 s进入一级预警,提前1.2 s进入二级预警;制动减速度在4~8 m/s2之间且制动维持了3.4 s左右;当车速降为0时,解除制动并与前车保持1.31 m的距离,避免了碰撞发生。
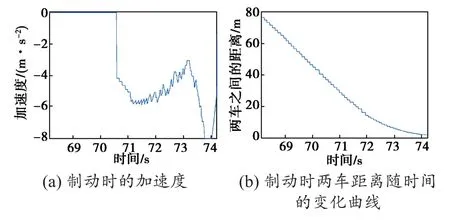

图8 本车80 km/h对前车静止的碰撞测试Fig. 8 Collision test of the vehicle 80 km/h against the front stationary vehicle
3.2.3 80 km/h匀速运行的本车对12 km/h匀速运行的前车
设定两车相距200 m,本车初始速度80 km/h,前方车辆匀速12 km/h,本车以80 km/h 匀速接近以12 km/h 低速行驶的前车,过程曲线见图9。驾驶员不操作制动踏板,本车提前1.6 s进入一级预警,提前0.9 s二级预警;制动减速度在4~8 m/s2之间且制动维持了2.3 s左右;当系统检测到不可能发生碰撞即本车速度小于等于前车速度时,自动解除制动且与前车保持0.8 m的距离,避免了碰撞的发生。
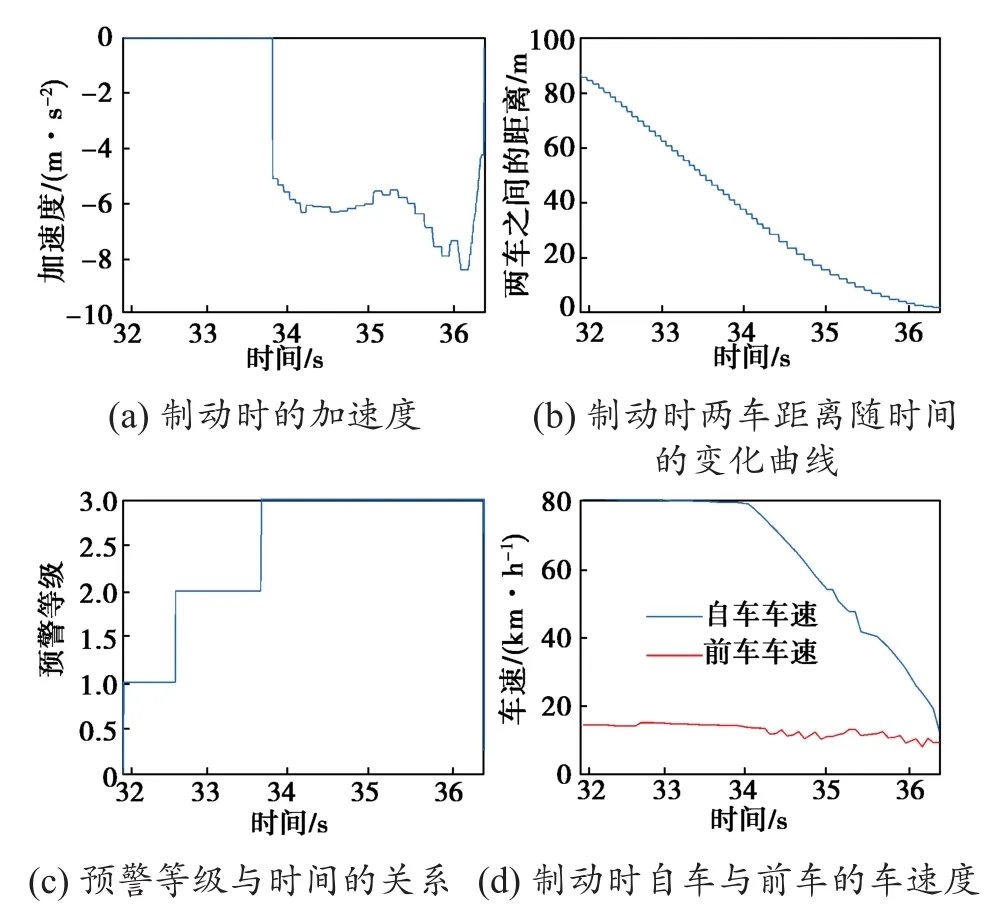
图9 本车80 km/h对前车12 km/h的碰撞测试Fig. 9 Collision test of the vehicle 80 km/h against the front vehicle 12 km/h
仿真和实车试验结果验证了采用本文所提自动紧急制动模型的有效性,其可产生预警和制动:预警时间满足标准JT/T 1242-2019的要求;制动减速度在4~8 m/s2之间;车速降低到安全车速后,本车与前车保持了0.6~1.9 m的安全距离,有效避免了碰撞的发生。
4 结语
本文提出一种基于全工况模型的AEBS控制策略,其根据前车运动状态分别对安全距离、安全时间进行动态解耦,有效降低预警/报警频率;并根据碰撞可能发生的严重程度实时调节制动力。根据标准JT/T 1242-2019的要求进行了仿真测试和实车试验,结果表明,采用该控制策略可以很好地辅助驾驶员行车操作,车辆在碰撞发生前发出预警信息并采取紧急制动措施,有效预防了碰撞事故的发生。
由于本文所提控制策略是基于标准JT/T 1242-2019,道路工况较为单一,而实际道路工况复杂多变,如多前车运动状态下的运行工况,此时车辆制动水平容易受到道路情况的影响,后续将对此开展更深入的研究。
