一种基于连杆机构的仿生四足爬壁机器人设计
2021-07-20王思远
王思远
(河北工程大学,河北 石家庄056002)
爬壁机器人是一种始于20世纪60年代的机器人,世界上最早的爬壁机器人是由日本西亮(Nishi AKira)教授所研制的一种负压吸附爬壁机器人。由于爬壁机器人可以在水平竖直乃至天花板等地自由的移动,从上世纪80年代起,爬壁机器人开始逐渐被应用于实际的生产活动之中,例如最早出现的负压吸附爬壁机器人,目前已被广泛应用于墙壁清洁,墙壁质量检测乃至反恐侦查等领域。时至今日,随着人们对于爬壁机器人的重视程度逐渐提高,自爬壁机器人诞生以来的60年中,产生了诸如磁吸附、旋翼吸附、仿生吸附等众多新型的吸附方式,大大拓展了爬壁机器人的可应用范围,在最近的十年里,人们对仿生吸附爬壁机器人的研究热情逐年高涨,不仅因其科幻感十足的外表,更因为仿生爬壁机器人在体型以及吸附原理上的优势,可以代替人类深入裂缝、坍塌物、深井、充满烟尘等众多危险空间内完成诸如勘探、侦查、质检一类的任务。本文以壁虎(gecko)作为仿生对象,设计了一种基于连杆机构的仿生四足爬壁机器人,本文将就仿生爬壁机器人的原理及发展、基于连杆机构的仿生四足爬壁机器人设计进行阐述,最后进行了展望与总结。
1 仿生爬壁机器人的原理及发展
1.1 仿生爬壁机器人的原理
仿生爬壁机器人的吸附原理可分为两类,干吸附及湿吸附。
吸附时不涉及粘附液体的分泌。仅依靠生物足部的刚毛结构与壁面间接触时产生的范德华力(van der waals force)进行吸附的吸附方式被称为干吸附。以壁虎(gecko)为例,壁虎的脚趾有许多褶皱,在这些褶皱上紧密地分布着许多刚毛,在每根刚毛的顶部又细分出许多绒毛,在壁虎需要将足部吸附在墙壁上时,壁虎会将脚趾向内弯曲,使褶皱上的刚毛与壁面紧密接触,由于刚毛的数量众多且结构细微,因而可以很好地适应墙壁上诸如凹坑一类的结构起伏,在保证刚毛与墙壁间的接触面积后,刚毛顶部的绒毛会产生足够大的分子间作用力,即范德华力(van der waals force),保证了壁虎与墙体间的紧密吸附;当壁虎需要与壁面间脱附时,会将脚趾向外弯曲,这时褶皱张开,减少了刚毛结构与壁面的接触面积,从而减小了足底与墙壁间的范德华力(van der waals force),由此即可实现脚底与壁面间的脱附。壁虎依靠这种独特的脚趾内翻-外翻机制,可以实现在墙壁上的快速移动,并且可以保护自身脆弱的刚毛结构不受损坏,如图1和图2。
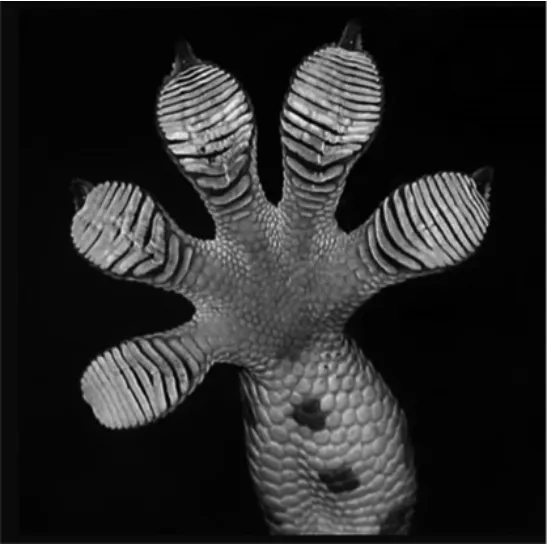
图1 壁虎脚掌结构图
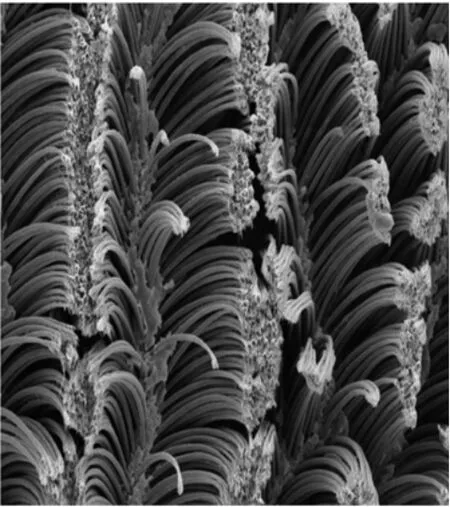
图2 壁虎足底刚毛
依靠动物分泌的吸附液体与壁面进行吸附的吸附方式称为湿吸附。以树蛙为例,树蛙脚趾上有许多多边形结构,粘附液体可以从这些多边形结构的缝隙中流出,使树蛙脚底形成多边形结构-粘附液-墙壁的三层结构,保证了吸附的强度。
1.2 仿生爬壁机器人的发展
目前各国研究的重点一般为干吸附爬壁机器人,湿吸附由于其设计粘附液的分泌,目前湿吸附爬壁机器人的研究领域尚少有人涉足。目前比较有代表性的干粘附仿生爬壁机器人如美国斯坦福大学研制的Stickybot[1](图3),中国南航大学戴振东教授研究的一系列壁虎仿生爬壁机器人等等。这类机器人如上文所述,采用范德华力(van der waals force)进行吸附;除了以壁虎为仿生对象以外,刘彦伟与其团队还研究了一种爪刺式仿尺蠖爬壁机器人[2](图4)和一种仿生爪刺式双足爬壁机器人[3](图5),这类机器人利用爪刺刺入墙体内或悬挂在墙壁的凸起上进行吸附,对于墙体的表面质量有一定程度的要求。

图3 Stickybot
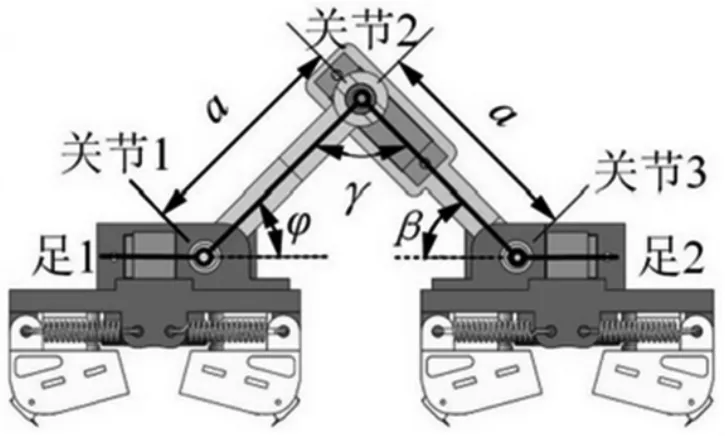
图4 一种爪刺式仿尺蠖爬壁机器人
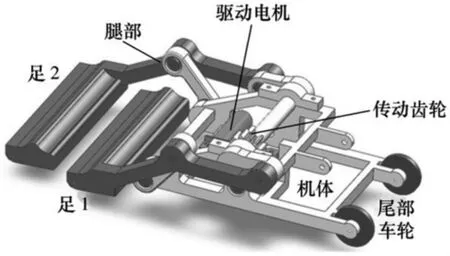
图5 一种仿生爪刺式双足爬壁机器人
2 一种基于连杆机构的仿生四足爬壁机器人设计
本设计以壁虎(gecko)为仿生对象,设计了一种基于连杆机构的仿生四足爬壁机器人,经过一些调查后,发现目前常见的一些仿生四足爬壁机器人设计中存在着一些问题,其一,在模仿仿生目标运动时,往往需要依赖大量舵机以模仿仿生目标在运动时关节的运动,如李达等人研制的一种类壁虎机器人[4],为了模仿壁虎的抬腿及前伸等动作,用到的舵机多达12个,过多的使用舵机会导致机器人控制的复杂化,同步性差,增加调试难度,导致机器人运动时的稳定性降低,并且会造成机器人负载过重;其二,目前常见的类壁虎爬壁机器人较少采用壁虎脚趾的内翻-外翻机制作为脱附机制,而是单纯的采用抬升-撕裂的脱附方式,导致刚毛结构在使用一段时间后会由于过度的撕裂而被破坏,影响粘附效果。
本设计针对上述问题,创新性地应用连杆机构和一种由Hongtao Zhao等人设计的电热敏执行器(ETSA)[5]到机器人的设计中,设计出的机器人结构精巧,传动可靠,可以作为上述问题的解决方案。
2.1 机器人的整体结构
结合图6,如图7所示,本设计由头部-1,右前腿-2,舵机1-3,前身-4,电源-5,右后腿-6,舵机2-7,尾巴-8,舵机3-9,左后腿-10,后身-11,腰部-12,左前腿-13,舵机4-14组成。
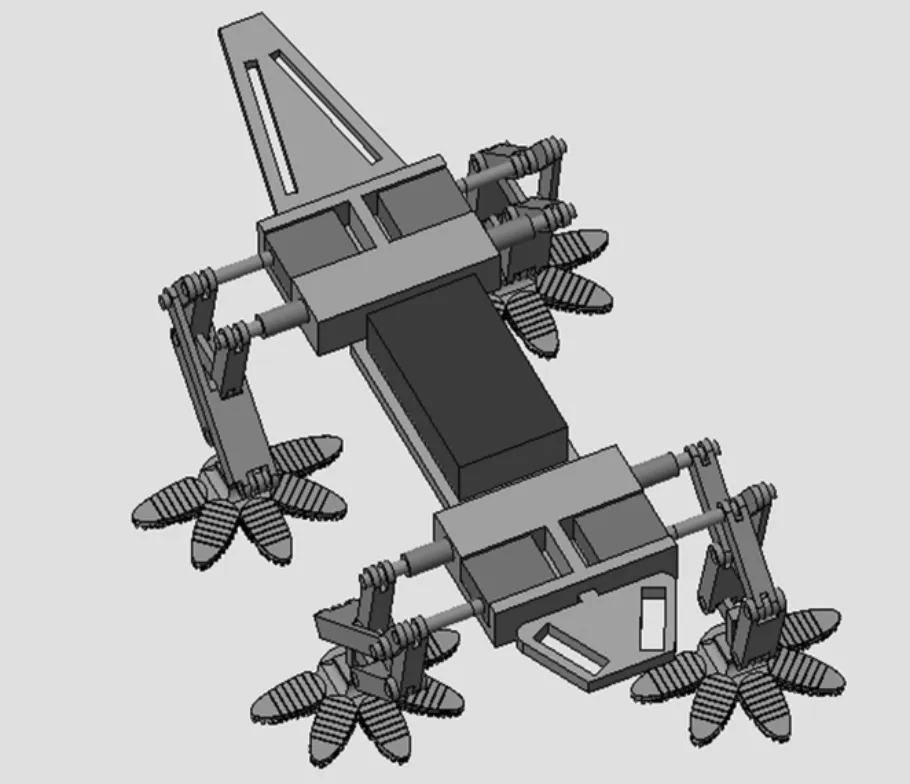
图6 机器人整体结构概览
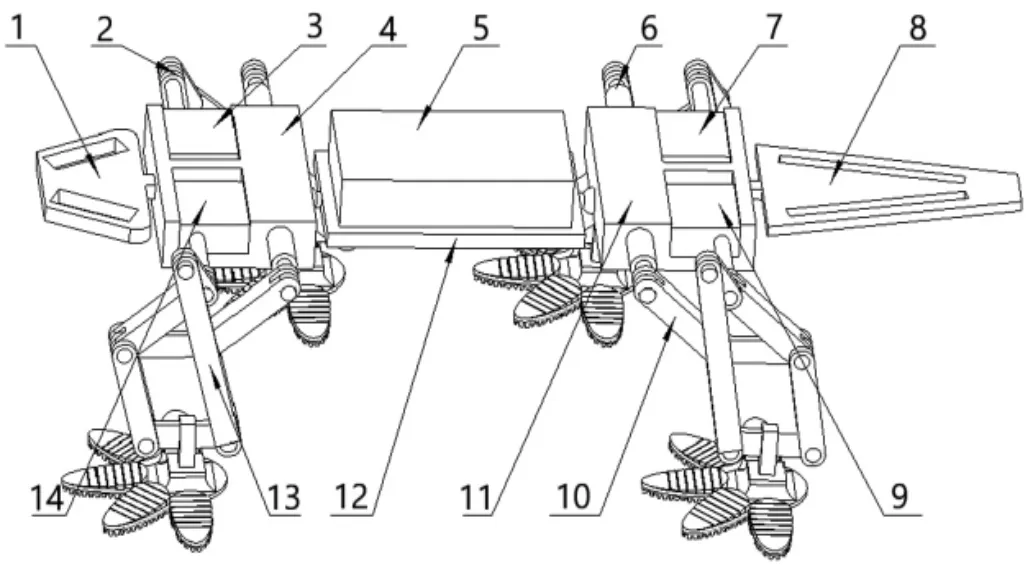
图7 机器人整体结构图
机器人的四条腿均通过悬臂梁与身体相接。在安装时为了实现机器人行走时的对角步态,机器人的左前腿与右前腿,左后腿和右后腿,原动节安装时存在180°的角度差,而同侧的前腿与后腿原动节在安装时不存在角度差。为了使机器人在运动以及站立时更加平稳,前后同侧的机器人腿部用了反装的方式,即弯曲方向相反。
机器人的前身-4与后身-11在与腰部-12连接时均采用球形关节连接,这样可以使机器人在运动时避免遇到由于壁面高度落差而引起足部无法着地的情况。
机器人的头部-1与尾巴-8分别安装在前身-4与后身-11上,起装饰作用,同时尾巴-8还起到平衡机器人身体的作用。
2.2 机器人的腿部构造
如图8至图11所示,外伸梁-15,25,33,49,原动节-23,24,34,42,传动节-22,27,35,48,中间节1-17,31,37,45,中间节2-18,28,39,46,从动节1-21,32,36,43,从动节2-16,26,41,50,从动节3-20,30,38,44,足部-19,29,40,47。
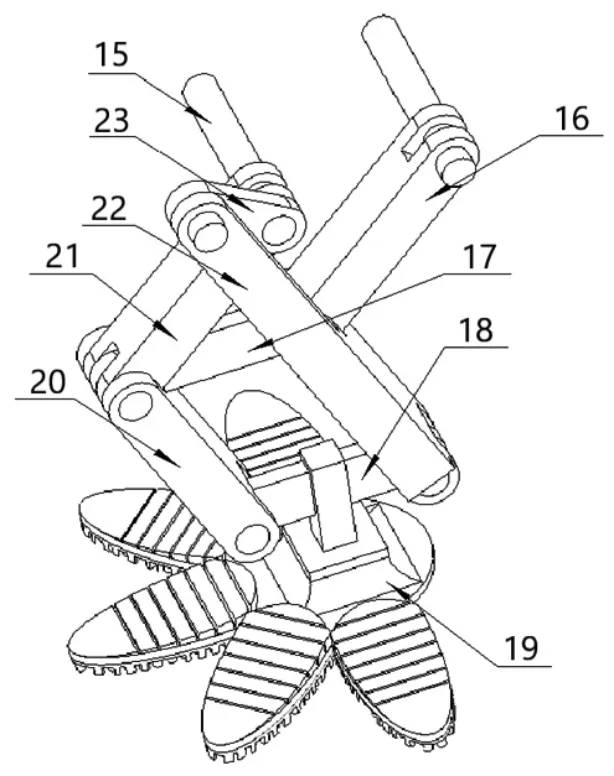
图8 机器人左前腿
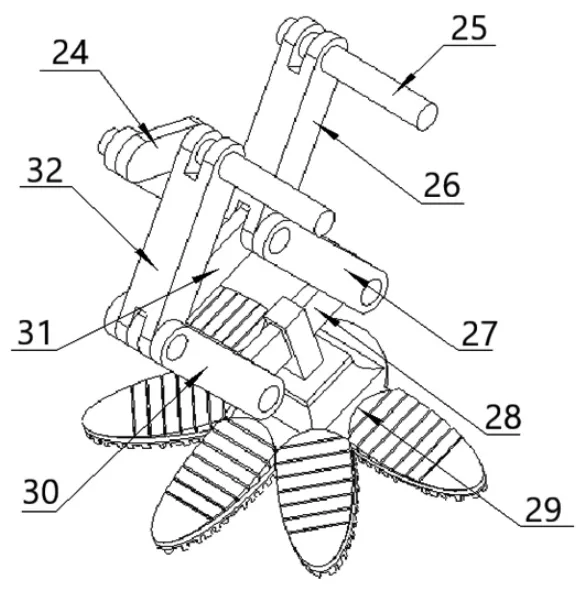
图9 机器人右前腿
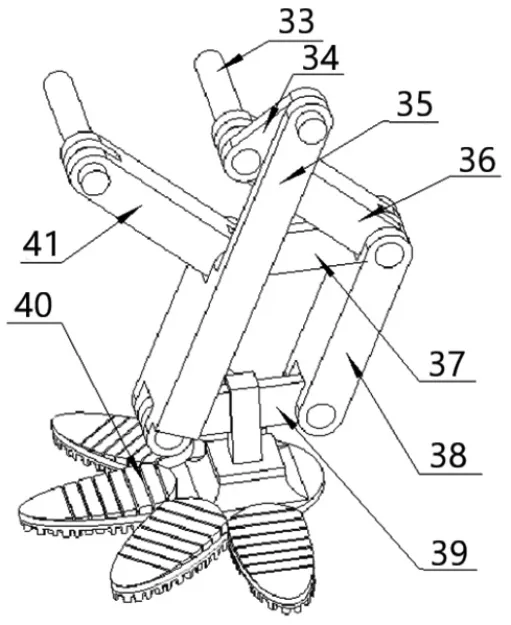
图10 机器人左后腿
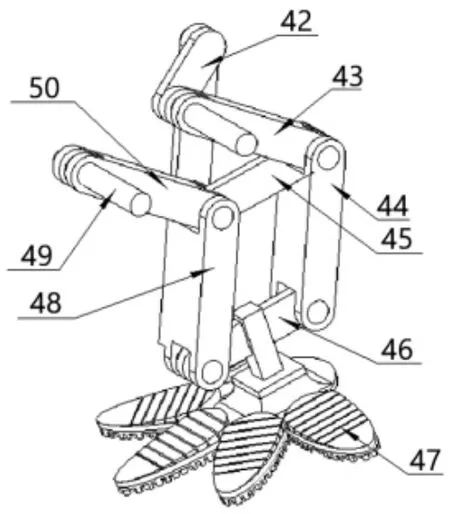
图11 机器人右后腿
本设计采用切比雪夫连杆机构,腿部各节长度比例为原动节∶中间节∶从动节∶传动节=1∶2∶2.5∶5。由于切比雪夫连杆可以在单一动力源的作用下同时完成机器人腿部的上下抬升以及前后运动,故整个机器人仅需4个舵机即可实现整个运动过程,十分方便可靠,除此之外,由于机器人采用腿足式的移动机构,拥有很强的跨障性
2.3 机器人足部构造
如图12,机器人足部由吸附刚毛-51,电热敏执行器(ETSA)-52,导向沟槽-53三部分构成,电热敏执行器是一种双晶片执行器,在一定大小的电压作用下,可以产生十分强大的阻断力,进而使机器人足部脚趾处沿垂直于导向凹槽的方向弯曲,以达到模仿壁虎脚趾外翻使足底与墙壁脱附的效果,当停止施加电压时,电热敏执行器会恢复原先平直的状态,由于机器人足底由橡胶材质做成,有绝缘性且富有弹性,故当电热敏执行器恢复平直时,机器人脚趾也会恢复初始状态,这一过程可以视作对于壁虎脚趾内翻的模仿;通过如此的内翻-外翻机制,可以保护机器人足底脆弱的刚毛结构不受破坏,延长机器人的使用寿命。机器人足底的刚毛吸附结构由聚二甲基硅氧烷(PDMS)制成,这种材料具有疏水性,在机器人足部刚毛结构接触到液体时,液体会裹挟刚毛中的杂质变为液滴滑落刚毛,使机器人足底的刚毛结构具有一定的自清洁性,提高机器人吸附结构的使用寿命。单根刚毛结构是截面为正六边形的柱状结构,刚毛长径比10:1,长度为4 μm,边长为400nm,刚毛间距为0.6μm,交错排列。
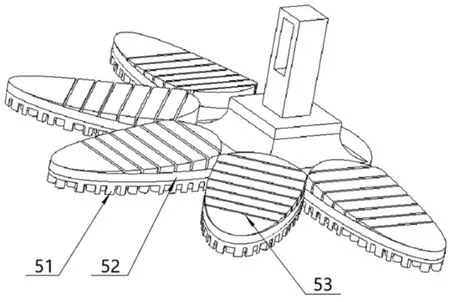
图12 机器人足部
2.4 机器人的运动过程
如图7所示,此状态可以视为机器人的初始状态,此时四只足均处于吸附状态,在运动开始时,右前足-29和左后足-40首先脱附,两腿在舵机-3,9的驱动下同时向前运动。机器人腿部运动的传递路线为:悬臂梁→原动节→连动节→中间节→从动节。
在运动开始时,由电源5向右前足29及左后足40的双晶片驱动器52施加一定大小的电压使双晶片驱动器52开始工作使右前足29和左后足40的脚趾开始沿垂直于导向沟槽53的方向弯曲,使两脚与壁面脱附,之后舵机带动原动节24和原动节34开始转动,由此带动右前腿2和左后腿10完成前迈进的动作,与此同时左前足19和右后足47保持吸附状态,在舵机带动下原动节23和原动节42开始转动,由此带动左前腿13和右后腿6后蹬同时抬升身体,当右前腿2和左后腿10运动到前极限位置(如图13编号4)时,左前腿13和右后腿6运动到后极限位置(如图13编号6),这时四只脚处于同一水平高度,使刚才处于悬空状态的右前足29和左后足40再度接触壁面并粘附,这之后在电源5施加的电压作用下左前足19与右后足47的双晶片驱动器52开始工作,使左前足19和右后足47脚趾开始沿垂直于导向沟槽53的方向弯曲,使两足与壁面脱附,脱附后在舵机作用下原动节23和原动节42开始转动,由此带动左前腿13和右后腿6完成向前迈进的动作,与此同时右前足29和左后足40保持吸附状态,在舵机带动下原动节24和原动节34开始转动,由此带动右前腿2和左后腿10后蹬同时抬升身体,当左前腿13和右后腿6运动到前极限位置时(如图13编号4),右前腿2和左后腿10运动到后极限位置(如图13编号6),这时四只脚处于同一水平高度,使刚才处于悬空状态的左前足19和右后足47再度接触壁面并粘附。至此,机器人恢复初始位态,机器人的一次运动周期结束。

图13 切比雪夫连杆的运动状态图
3 结束语
作为一种近十年来新兴的爬壁机器人种类,仿生吸附爬壁机器人由于其小巧的体型,对于吸附壁面表面质量要求低等诸多优势,可以深入坍塌物的缝隙、深井、充满烟尘的区域等极其危险的领域代替人类进行作业,因而可以被很好地应用在军事侦察、救援、勘探、质检、清洁等方面,在未来具有很广阔的发展前景,但因目前对于仿生爬壁机器人的研究还处于起步阶段,在诸如粘附结构的研究制作上还有较大的欠缺,这导致了目前爬壁机器人的载重能力较弱,并且由于目前的小型供电电池尚无法满足爬壁机器人长时间的功耗需求,因此目前仿生爬壁机器人往往需要用导线连接固定电源以保证其用电需求,这大大限制了爬壁机器人的运动范围。在未来的研究中,应将重点放在此处。
本文设计的基于连杆机构的仿生四足爬壁机器人具有结构简单,控制容易,运行稳定的特点,且因其自身质量很小,可以在自身载重允许的范围内对其功能进行扩展,应用在诸如侦查、墙壁质量检测、玩具等领域中。
