基于TDOA和AOA算法的声源定位模型的研究
2021-07-18黄子豪牛启光王译晨李鑫
黄子豪,牛启光,王译晨,李鑫
(山东科技大学,山东济南,250031)
0 引言
声源定位是听觉系统对发声物体位置的判断过程,它包括水平声源定位和垂直声源定位以及与发声者距离的识别。对声源方位的识别是人和动物对环境感知的一种基本方法,有利于动物捕捉猎物、寻找配偶和躲避危险。在听觉言语交流过程中,有助于人们将注意力转向或回避某声源。在多声源的复杂声场中,声源定位功能有助于从背景声中锁定声学目标,分离有用信息。
1 问题背景
麦克风阵列是指由若干个麦克风按照一定的几何形状组合而成的阵列,相对于单个麦克风而言,具有定位准确,识别率高的特点。不仅可以提高声源的接收信号,还具有定位跟踪识别的特点。如今对麦克风阵列的研究依然是声源定位系统的研究热点,但是传统的麦克风阵列定位系统存在误差大、受噪音干扰大的特点,因此进一步提高声源定位准确性,将声源定位应用于更广泛的领域,仍然需要突破传统方法的弊端。
2 问题分析
首先确定麦克风阵列的最佳几何形状。将二元基阵、三元基阵、四元及其多元基阵构成的麦克风树几何形状对声源定位的准确性进行比较,根据分析可知,最佳的几何形状为正三角形时,定位的准确度最高且计算更为简便。
建立基于TDOA 算法和AOA 算法改进的声源定位模型,给定封闭大厅的具体长宽高,在此基础上计算出声源距离麦克风的角度范围和各个麦克风到达声源的距离范围,最后根据所构建模型求解出声源的具体坐标。
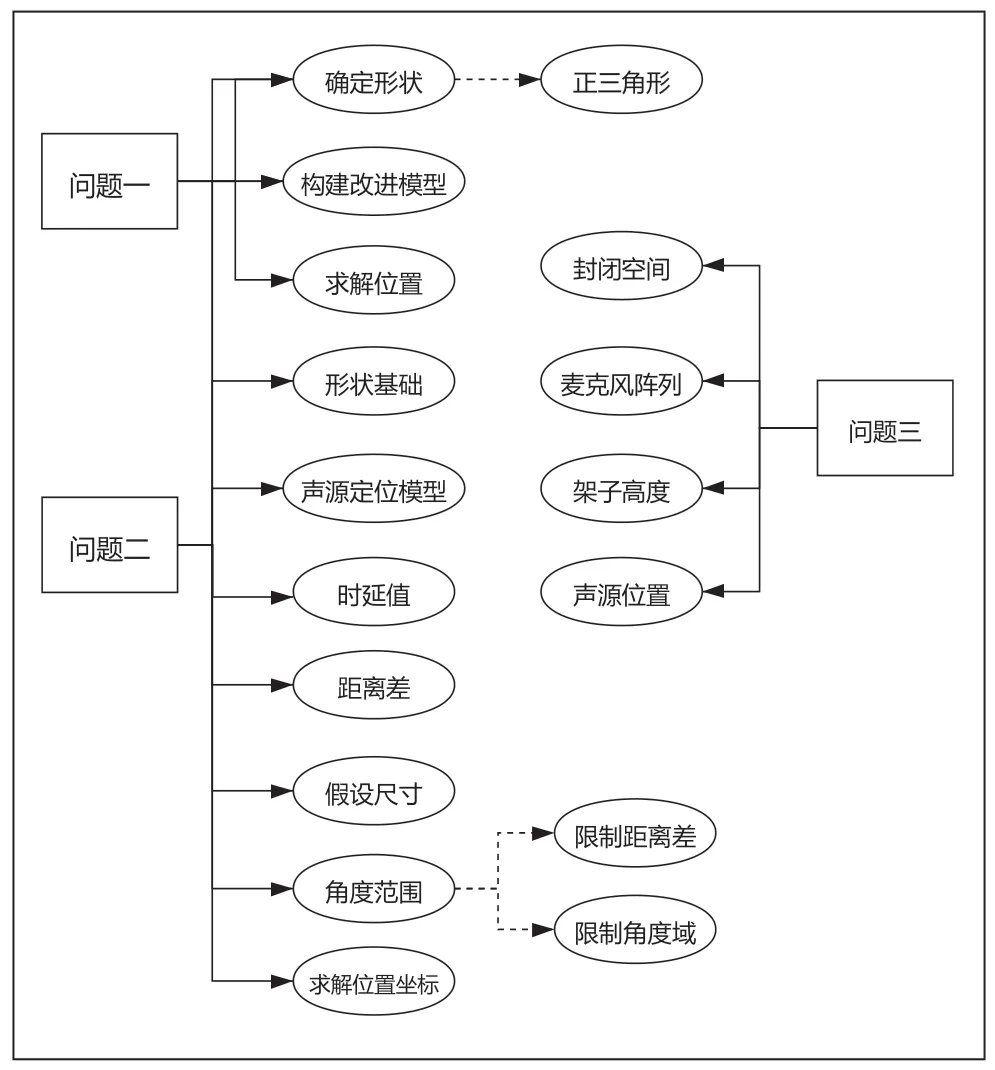
图1 问题分析示意图
3 构建麦克风阵列仿真模型
确定麦克风树的几何排列形状,为了更好地用麦克风阵列,对声源进行识别。本文针对不同的阵列形状对声源识别性能展开对比,可以得到最佳的麦克风阵列几何形状。麦克风树组成的二维坐标系中的平面基阵模型如图2 所示。

图2 麦克风平面基阵示意图
声源坐标为p(x,y,z),声速为常数c,声波的传播形式以直线传播为主,声源距离原点得距离是:平面基阵模型是由若干个阵元Si 组成。S0 为坐标原点并且是参考阵元,组成的平面基阵图中得几何关系进行定量表示为:
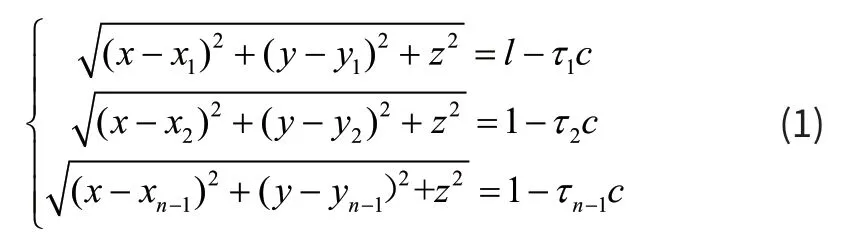
经过化简可得:
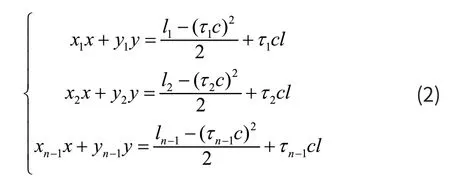
二元基阵是在平面基阵的基础之上,坐标原点仍然为参考阵元,其中另一阵元s1 的坐标设置为(x1,y1)。
在平面基阵的基础上,可以列出二元基阵的时延估计方程为:

由上述式子可以看出,在二元基阵中对声源进行定位时,在一个方程中出现了两个未知量,因此这表明当使用二元基阵对声源进行定位时,声源位置的结果将会呈现线性分布状态。
■3.1 三元基阵
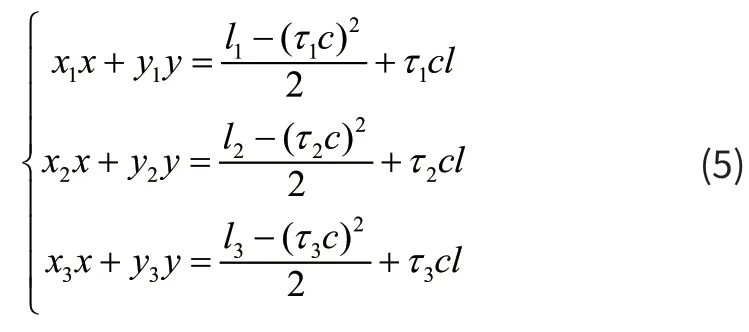
和上述前提相似,同样将坐标原点作为参考阵元,而在二元基阵的基础上,新增阵元s3 的坐标为(x3,y3),并且s0,s1,s2,s3 不在同一条直线上,在平面基阵的基础上,三元基阵的表达式为:

由三元基阵方程可以得,可以通过求解矩阵方程准确的确定声源的具体位置。但是在实际当中,由于受到环境因素的影响,定位的结果和实际的声源位置会产生一定的出入。而经过不同学者通过对数值模拟进行计算分析,得到了不同形状下特征三元阵的目标定位误差。得出了下面结论,如果要使整个平面的定位准确度不会出现较大的误差,那么就应该优先考虑使用正三元基阵结构,也就是正三角形基阵结构。
■3.2 四元基阵及其多元基阵
坐标原点s0 依旧为参考阵元,其余三个阵元依旧不在同一条直线上,由平面基阵模型可得四元基阵的定位方程式为:
在上述方程组当中可以看出该式子存在约束条件。因此也就是说,在实际的定位计算过程当中,对两两不同的方程组进行求解时将会出现不同的解。这也将会使它的定位结果会偏离实际的声源位置,会产生使定位结果面积扩大,也就是误差增大的现象。
■3.3 对比分析确定阵列形状
麦克风阵列有时会以某种规则的形式进行排列,而有时则是随机的散布在某些区域当中。阵列的选取对声源定位的精度影响非常大。常见的阵列形式主要是有直线形和十字形,还有线型。其中线型结构较为简单,通过适当的计算可以准确的检测出声源的位置。
分别采用由二元,三元,四元及多元基阵组成的直线形三角形矩形和圆形麦克风数进行声源定位识别测试。采用二元、三元、四元及其多元基阵组成的形状分别为直线型、三角形、矩形和圆形对声源进行识别。假设采样时间为20s,采样间隔为0.5s,运用MATLAB 求得多元基阵的声源定位特点和准确度。
由表1 可以看出,由二元基阵构成的直线型阵列成线性分布,这也同时验证了二元基阵推导式的正确性,四元基阵组成的矩阵阵列相较于二元基阵构成的直线形阵列的声源定位功能更准确,偏移距离更小,误差更小。因此四元及多元基阵组成的矩形阵列比二元基阵组成的直线形阵列更有优势。

表1
而以三元基阵组成的正三角形阵列和其他三种基阵阵列相比,偏移距离更小,声源定位区域更精确。因此三元基阵组成的正三角形阵列结构是声源识别定位中最稳定,最准确的基阵.三元麦克风的几何排列形状如图3 所示。

图3 三元麦克风基阵排列图形
4 构建基于TDOA 和AOA 算法改进的声援定位模型
TDOA 法又称为双曲线定位法,通过监测信号到达麦克风的时间可以算出麦克风和声源的距离。利用声源到各个麦克风之间的距离,可以计算出声源的具体坐标。
而无论是采用TDOA 法还是AOA 算法,都会存在定位过程中测量值误差较大的问题。因此单独使用声源定位方法对目标进行定位时,都达不到理想的定位精度。为了更好更精确地计算出声源的具体位置,可以将定位方法的某些结合起来使用,用一种定位方法的优势之处来填补另外一种定位方法的不足,从而达到互补的效果,以取得更精确的定位结果。
将TDOA 定位方法与AOA 定位方法结合起来,假设各个麦克风的坐标分别为:mic1(x1,y1),mic2(x2,y2),mic3(x3,y3)。
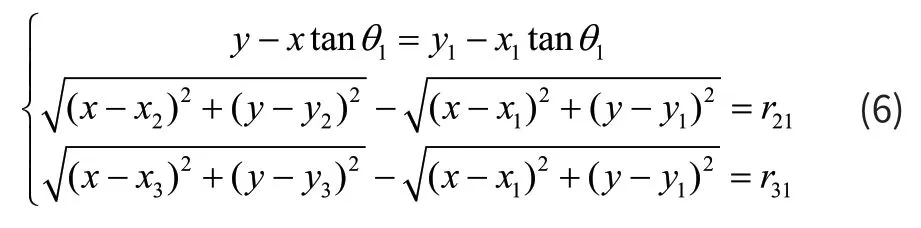
分别测试声源到达各个麦克风的距离和到达参考麦克风的距离差,计算出声源和麦克风角度。
为了将人和麦克风的位置范围限制在房间内,我们采用AOA 定位与TDOA 定位结合使用的方法构建模型。假定封闭空间的具体长宽高分别为20m、10m、10m。
极限情况1:假设声源位于(10,20,0)时,麦克风1位于(0.05,0.15,1.8),麦克风2 位于(0.1,0,1.8),麦克风3 位于(0,0,1.8)时,取得最大AOA 角85.4°。此时声源与麦克风1 之间的距离为22.26 米,与麦克风2 之间的距离为22.36 米,与麦克风3 之间的距离为22.43 米,此时可以明显看出,麦克风1 与声源距离最短,因此为基准麦克风。则声源到达麦克风2 与到达基准麦克风的距离之差为0.1 米,声源到达麦克风3 与到达基准麦克风的距离之差为0.17 米。
极限情况2:当声源位于麦克风树正下方时,仍设麦克风1 位于(0.05,0.15,1.8),麦克风2 位于(0.1,0,1.8),麦克风3位于(0,0,1.8),此时声源应位于(0.05,0.05,0),此时取得最小AOA 角0°。计算求得声源与麦克风1 之间的距离为1.803 米,与麦克风2 之间的距离为1.803 米,与麦克风3 之间的距离为1.803 米。
以上考虑了当AOA 角处于极限大小的两种情况,在MATLAB 实际仿真中,当限制麦克风树与人的范围为假定房间的长宽高时,首先得出AOA 角的有效范围能对人的位置做出更加精准的判断。在假定情况下,我们实际算得,当AOA 角为85.4°时,声源的估计位置为(8.77,17.96,0)。当AOA 角为0°时,声源的估计位置为(8.77,17.96,0)。这与实际位置的偏差值为6%左右,在误差允许范围内,对于其他位置均可结合AOA 角与TDOA 算法进行较为精准的位置估计。
最终求解出当AOA 角最小为0 时的声源坐标为(0.026,0.015,0),当AOA 角最大为85.4 度时的声源坐标为(8.77,17.96,0)。
5 模型的优缺点
■5.1 模型的优点
将TDOA 算法和AOA 算法相结合,取长补短,弥补了各自算法的短板,将两个算法进行结合。减免了计算过程的冗长复杂,有效地节省了数据的传输量和传输时间。不仅提高了运算效率,而且也提高了运算准确度。为后续的声源定位算法奠定了坚实的基础。
■5.2 模型的缺点
采用的声源定位方法,其定位准确度主要取决于定位过程当中距离差的大小和范围以及角度的范围。这造成了麦克风阵列的空间分辨率不足可导致生源的混叠。从而造成对生源未知的错误估计。
使用的麦克风阵列定位算法计算量大且不便于移植。再者由于互相关函数是建立模型的基础 并且是在没有环境噪音的影响下产生的。因此对实际环境的考虑不全面,所求的数值较为理想,忽略了环境因素对声源定位的影响。
6 模型的推广
(1)对TDOA 模型算法进行改进之后,由于其在实际过程当中不受麦克风阵列位置的不确定性影响,故可以将三元麦克风阵列应用到移动机器人声源定位过程中。
(2)改进后的模型具有敏感性大的特点。可以利用感知信息对特定目标进行识别和跟踪。这不仅是机器人领域的内容,同时也是军事领域关注的重要热点。
(3)由于模型可以准确地获取目标声源的位置信息,包括方位角、俯仰角和距离。而在实际应用过程当中,传感器的噪声干扰和声源目标本身都具有较强的不确定性和未知性,这给定位精度带来很大的困难。而改进后的模型恰好巧妙地避免了这一缺点。因此可以将模型运用到对听觉感知的研究和语音辨别理解等领域上。
7 结束语
声源定位技术不论是在日常生活中或是工业生产中应用都十分广泛,可以用于声音的识别和噪声声源的定位等问题,目前声学产品也进入大规模的研发模式,声源检测和定位系统也逐渐成为热门的研究课题,这对于我国声学领域的研究起到了积极的推动作用。
