水下机器人密封电子舱漏水检测系统设计
2021-07-07朱明明辛绍杰邓寅喆
朱明明,辛绍杰,邓寅喆
(上海电机学院机械学院,上海201306)
水下机器人具有体积小、安全稳定等性能,逐渐成为海洋水文勘探与水下资源探索的重要工具,成为当今的热门研究领域[1]。水下机器人在水下执行工程项目时,最重要的是保证水下机器人密封舱的密封性良好,密封舱密封性良好是水下机器人在水下安全作业的前提保障。因为密封舱是水下机器人观测云台设备和控制电路的载体,内部包含载体控制板、电子罗盘、云台、摄像机、深度传感器等电子元器件[2-3]。目前用于水下机器人密封舱漏水检测的传感器多为水浸传感器、温湿度传感器、电压传感器等[4-7]。但对于传统的传感器检测方式,由于水中湿度大,导致水下机器人密封舱相对比较潮湿,水浸传感器检测探头可能会发生误操作,并且水下温度基本恒定,变化范围不明显,温湿度传感器可能无法准确地检测出由于漏水产生的温度以及湿度变化。而基于电压传感器设计的漏水检测系统,其探头未触水时水下机器人控制器也有可能检测到高电平,进而发生误报指令,导致检测失败。
针对以上问题,对于水下机器人电子舱密封性监测,本文设计了一种基于视觉传感器检测的漏水检测方案,所设计方案简单易实现、实时性强、误警率低,并且监测结果可靠,可用于水下机器人密封舱的漏水检测。
1 漏水检测系统设计
基于视觉模型的漏水检测系统,视觉模块与水下机器人主控芯片通过UART串口进行通信。实现过程为:首先在密封舱头尾球罩与筒体的接口处粘住试纸,该试纸遇水变红;然后在水下机器人密封舱筒体合适的位置固定放置视觉模块,保证密封舱头部、尾部与筒体之间的接口处在摄像机的视场内,通过视觉模块观察目标,利用视觉处理技术监测密封舱是否漏水。若水下机器人运行中检测到试纸变红,则密封舱漏水,此时视觉传感器UART串口输出为“1”,主控制器接收数据同时执行上浮命令;若UART串口未输出“1”,则密封舱密封正常,水下机器人正常执行作业任务。图1所示为密封舱体结构图。图中,1为压盖,2为亚克力半球罩,3为硅胶密封垫圈,4为法兰,5为O形橡胶密封圈,6为尼龙舱筒体[8]。图2所示为密封舱筒体贴纸实物图。
图1 密封舱体结构图

图2 密封舱筒体贴纸实物图
根据视觉模块进行漏水检测的系统软件设计,系统软件主要完成从物体图像采集识别到水下载体漏水检测控制的全过程[9]。首先采集视频图像,通过目标识别与跟踪得到目标的图像色彩,借助视觉传感器颜色识别技术完成水下机器人密封舱漏水检测。由图3可知,漏水检测传感器与水下机器人主控制器通过UART串口进行通信,通过设置串口以及波特率(设置为115200),使检测传感器嵌入主控制器上,以实现漏水检测传感器向主控制器发送数据。为实现漏水检测控制系统的实时性和快速性,设置检测传感器串口输出“1”时,表示漏水检测传感器检测到密封舱发生漏水,即密封舱内部渗水导致检测试纸变红。水下机器人的控制系统以此为控制量形成闭环,控制水下机器人继续作业还是立即上浮,达到漏水检测的目的。系统软件分别运行在视觉传感器和主控制器上,整个密封舱检测系统软件流程如图4所示。
图3 漏水检测系统设计实物图
图4 系统软件流程图
2 漏水检测传感器颜色分割算法研究
颜色模型在视觉图像处理的研究领域中,最为常见的是以红、绿、蓝3个颜色分量为主色的RGB模型,其颜色模型在三维坐标系中用单位正方体表示[10]。而在实际情况中,会有多因素导致相近颜色区域的各分量值出现较大的差别。选取合适的颜色空间模型和分割方法,漏水检测的结果才更佳。在水下机器人漏水检测系统中从视觉角度考虑,LAB颜色空间模型相比RGB颜色空间模型更具有直观性。因此,本文以LAB颜色空间作为研究对象进行视觉传感器目标识别的阈值设定。
2.1 RGB颜色空间模型
颜色模型中红、绿、蓝3个原色通道可以组成RGB颜色模型,其中R为红色、G为绿色、B为蓝色,自然界中的其他颜色可以通过三原色的叠色实现,其包含了人类视觉所能感知的所有颜色[11],并且每个颜色通道都有256个色阶亮度,产生不同的灰度调。其中黑色调(0,0,0)对应三通道的灰度值均为0,反之白色调(255,255,255)对应三通道的灰度值均为255。图5所示为三维坐标系中的空间模型。

图5 RGB颜色空间模型
2.2 LAB颜色空间
LAB颜色模型色彩空间的色域最宽,理论上包含了人眼所能看到的所有色彩的色彩模式,其每一组色值和一种色彩一一对应[12],可以将人的视觉感应通过数字化的方式描述出来。相比RGB颜色空间的不同在于其每个通道既有明度又包含有颜色[13]。LAB是一种独特的色彩空间,L、A、B3种参数可以表示任何一种颜色。其中L取值为[0,100],用于描述像素的亮度,主要负责水下机器人视觉传感器采集到的图片明暗度,即采样图片的黑白版;A取值为[127,-128],表示从红色到绿色的范围;B取值为[127,-128],表示从黄色到蓝色的范围;A和B共同决定了水下机器人视觉传感器采集到的图片颜色的多少[14]。
2.3 LAB颜色空间转换
为实现密封舱漏水时漏水检测传感器采集到的图像能有效分割,选择适合的颜色空间。本节将图像的RGB非均匀颜色空间转换到LAB均匀颜色空间,实现颜色空间分割的选择[15]。由于RGB颜色空间不能直接转换为LAB颜色空间,所以借助XYZ颜色空间,把RGB颜色空间转换到XYZ颜色空间,然后再把XYZ颜色空间转换到LAB颜色空间。
首先将RGB颜色空间转换到XYZ颜色空间,如下式所示:
式中:X、Y、Z为RGB颜色空间转XYZ颜色空间后计算出来的值,变换后的颜色空间使用X,Y,Z为三基色。这样,每种颜色都可以表示成X,Y,Z的混合,其中:

由 式(1)可 知,其 中 的X=0.4124R+0.3576G+0.1805B,各系数相加为0.950 5,接近于1。因为RGB的取值范围为[0,255],若系数和相加为1,则LAB的取值范围也在[0,255],因此等比修改各系数,即X,Y,Z分别除以0.950 47,1.0,1.088 83,使其系数和等于1,使XYZ颜色空间和RGB颜色空间在同等范围内映射,然后再将XYZ颜色空间转换到LAB颜色空间,有

式中:L、A、B为最终LAB颜色空间的3个通道值。
2.4 颜色分割算法实现
对于本文所设计的水下机器人密封舱漏水检测系统,由于识别的目标固定,故提前设定阈值即可检测目标的变化,判断密封性能是否良好。图6所示为视觉传感器采集到的源图像以及经过颜色分割算法识别出来的二进制图。图6(a)为实验所用水下机器人的取样图,因为其表面为红色,故可检测视觉传感器识别效果;图6(b)为通过LAB设定阈值后的效果图,可见所设计的算法能够将红色与其他颜色分割出来,可将算法用于密封舱筒体所贴的试纸变红检测。表1给出了LAB各通道的最大值和最小值,将设定好的阈值写入程序,即可实现传感器的漏水检测算法程序。

图6 漏水检测传感器目标识别
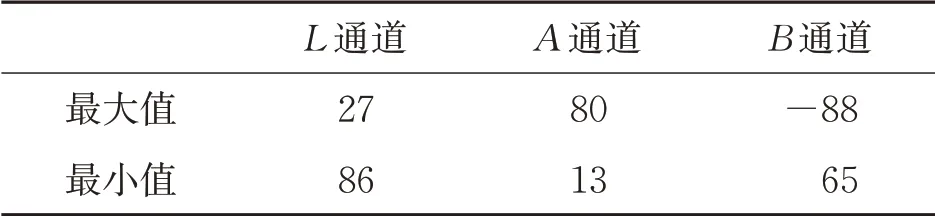
表1 LAB阈值取值
3 实验验证
由于水下机器人密封电子舱内部含有控制器、摄像机、云台以及各类外设传感器等,所以工程作业型水下机器人无法对其进行漏水时密封舱检测实验。因此,本文在实验室采用水盆实验法,以实验开发型水下机器人对漏水检测系统进行验证,并且简化密封舱内部结构,使其只含有漏水检测传感器,以确保漏水检测实验的安全性。通过实验测得水下机器人密封舱漏水检测系统效果,表明所设计的系统可达到应用于作业型水下机器人密封舱检测的目的。
为了证明检测效果,防止漏水检测传感器误操作带来的影响,分别进行了完全密封实验和漏水实验。根据上文设计,在漏水实验中,视觉传感器串口应该输出“1”,而密封状态良好情况下,视觉传感器无任何输出结果。通过对两种状态的实验结果进行对比,说明在密封舱完全密封状态下,漏水检测传感器输出结果正常,不会与漏水时检测到的结果一致,保证了漏水检测系统的准确性,相比传统传感器检测效果而言降低了传感器误警率。图7所示为水下机器人密封舱漏水检测实验。

图7 水下机器人密封舱漏水检测实验
水下机器人密封舱漏水检测实验中,在密封舱漏水时传感器输出结果通过串口显示输出为“1”,并且显示当前时刻的时间戳。实验结果如图8所示,表示漏水检测传感器检测到密封舱发生漏水现象,此时将结果传输给主控制器,主控制器立即停止水下机器人当下任务,执行上浮指令。在密封舱密封良好时的实验输出结果如图9所示,可见密封良好时串口无任何输出结果,此情况表明水下机器人密封舱无漏水情况发生。由图8和图9可知,本文所设计的漏水检测系统可实现对水下机器人密封舱的漏水检测。
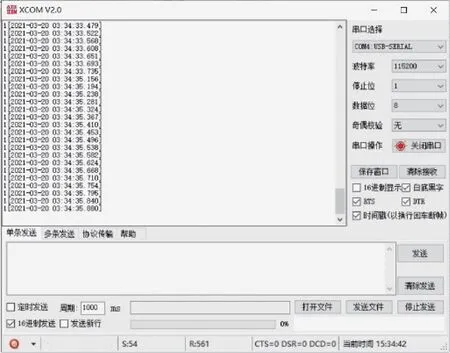
图8 漏水状态的串口输出结果
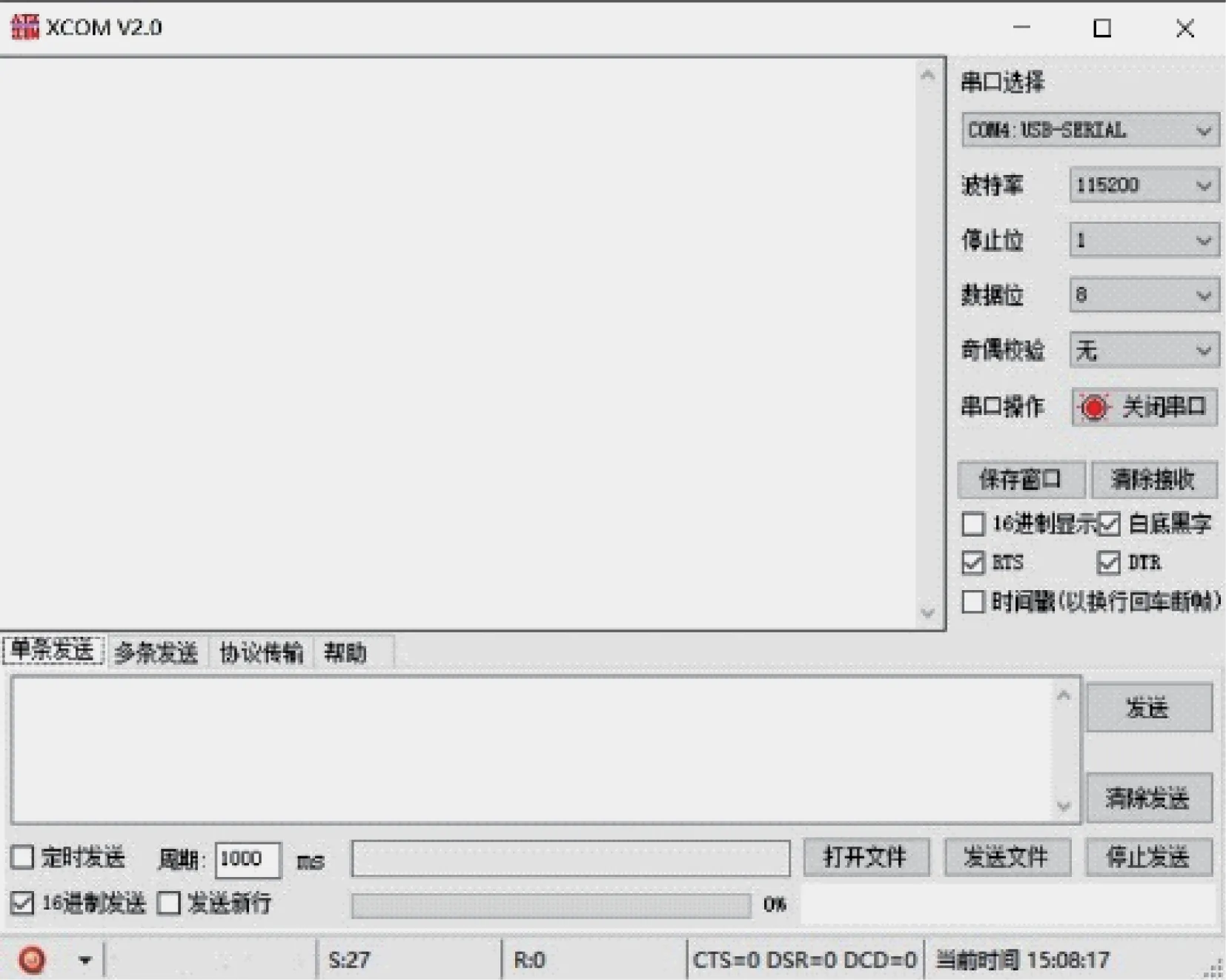
图9 完全密封状态的串口输出结果
4 结 语
通过硬件平台搭载漏水检测传感器,对密封舱进行密封良好实验以及漏水实验,验证本文所设计的漏水检测系统的实用性和准确性。通过对设计的漏水检测系统进行实验验证,表明设计的漏水检测系统能够实现对密封舱密封性的检测,可以用于企业工程项目型水下机器人密封电子舱的密封性监测,这对于水下机器人在水下复杂环境下作业的安全性问题又多了一层保障。
