半球谐振陀螺的结构参数对工作模态以及进动系数的影响*
2021-07-07李毅轩
李毅轩,周 怡,苏 岩
(南京理工大学 机械工程学院·南京·210094)
0 引 言
半球谐振陀螺(Hemispherical Resonator Gyroscope,HRG)是继传统的机械陀螺、激光陀螺和光纤陀螺之后发展起来的一种新型高精度陀螺,具有高精度、长寿命和高可靠性的特点,是高精度惯性器件的主要研究目标之一。国外半球谐振陀螺,以美国Northrop Grumman公司研发的HRG130R型半球谐振陀螺为代表。其零偏稳定性小于0.0015(°)/h,并且可靠性极强。目前,应用该半球谐振陀螺的空间方位测量系统已被成功应用于航空、航天和制导武器等多个领域。在国内,由中电二十六所研发的半球谐振陀螺已在通信卫星试验技术二号上得到了成功应用。由于半球谐振陀螺独特的性能优势,加快国内半球谐振陀螺的研究进度,对国家空间技术的发展有着极其重要的意义。
半球谐振陀螺通常由半球谐振子、激励罩和敏感基座三部分组成。为了加强半球谐振子的振动稳定性,同时确保其高精度的性能,加工材料可选用低热膨胀系数、高品质因数(Q-Factor)的熔融石英。半球谐振陀螺的工作原理基于振动的半球谐振子在绕其对称轴转动时所产生的哥氏效应(Coriolis effect),即使谐振子振动的振型相对于谐振子反方向旋转的物理机制。具体而言,当绕半球谐振子对称轴有角速率Ω
输入时,经过一段时间,谐振子以角速率Ω
绕对称轴转过角度φ
。此时,谐振子的驻波振型的振动波腹将相对于谐振子向相反的方向进动角度θ
。理论与实验证明,θ
= -Aφ
。其中,A
为陀螺仪的进动系数,A
的值只取决于陀螺的材料属性和几何参数。为实现半球谐振陀螺的高精度性能,本文基于建立的半球谐振子的有限元模型,结合谐振子振动的动力学方程,分析了半球谐振子的主要结构参数对振动模态、固有频率以及进动系数的影响规律,为半球谐振子的结构优化设计提供了理论参考。
1 半球谐振陀螺进动系数的计算理论
进动系数是陀螺仪的关键性能指标,它与陀螺仪的灵敏度正相关,而进动系数受陀螺仪结构参数的影响,因此分析半球谐振陀螺几何参数的波动对进动系数的影响具有十分重要的意义。半球谐振陀螺的工作模态是具有四波腹和四波节的酒杯模态(wineglass mode),故其进动系数为哥氏耦合系数k
的1/
2,而k
的表达式为
(1)
式中,m
为半球谐振子工作模态的等效质量,m
为半球谐振子的哥氏耦合质量。对于音叉陀螺而言,计算这些参数是非常简单的,因为在几何运动模式(平移或扭转)中,提供弹性刚度的梁和提供敏感质量的质量块是有非常明确的区分的。但是,对于连续质量的陀螺(如半球谐振陀螺)而言,其谐振子同时充当着质量和弹簧,这导致其弯曲和扭转运动更为复杂。为求解半球谐振陀螺的等效质量和哥氏质量,需要将半球谐振陀螺的动力学方程简化为质量-弹簧二维运动方程,等效质量和哥氏质量可以分别从其中的惯性力项和哥氏力项前的质量系数中提取出来。简化复杂谐振结构的运动形式一般采用拉格朗日方程

(2)

(3)
式中,q
和q
代表广义坐标;T
为系统的动能;V
为势能;D
为阻尼能;F
和F
是外力。对于半球谐振子这种连续性的振动结构,T
是整个谐振子上一个有限微元p
的动能的积分
(4)
式中,ρ
为密度,(p
) 为微元p
的绝对速度。考虑一个位于旋转坐标系位置的陀螺,如图1所示。该旋转坐标系相对于惯性坐标系以角速度Ω
旋转和以速度平移。当位于传感器坐标系位置的有限元p
的运动位移为(p
)时,该微元的绝对速度(p
)可以表示为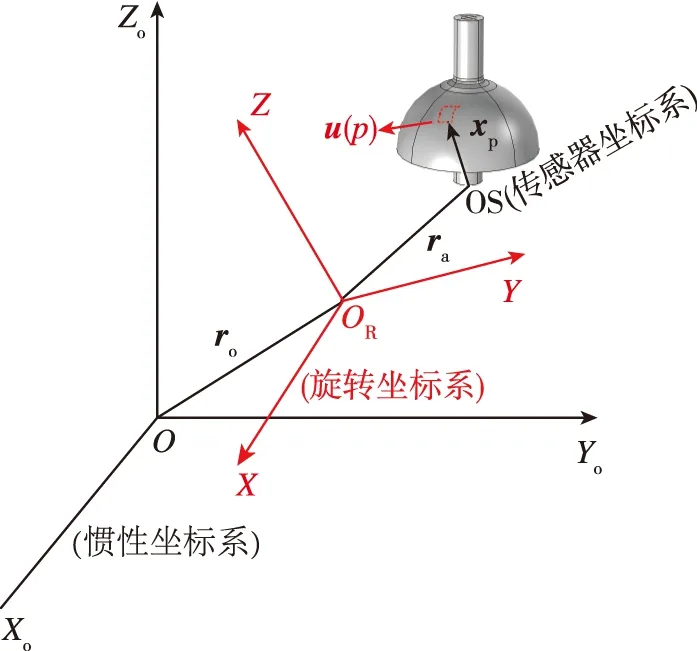
图1 半球谐振陀螺有限元p的运动坐标系Fig.1 Motion coordinate system of finite element p of HRG

(5)

(6)
对于固体波动类型的陀螺,当陀螺振动中的谐振子受到角速度输入时,它的运动由两个相对位置为45°的酒杯模态组成,因此可以用酒杯模态参数表示半球谐振子上有限元p
的运动。这两个酒杯模态的振幅可以由模态坐标(q
,q
)表示。在酒杯模态中,陀螺谐振子上不同位置的微元的振动幅度不同,故将q
和q
定义为两个酒杯模态的最大位移,陀螺谐振子在其他位置上的振动幅度用q
和q
归一化处理。这些归一化的振幅可组成陀螺酒杯模态的振型函数,(φ
1,φ
1,φ
1)为驱动酒杯模态的振型函数,(φ
2,φ
2,φ
2)为检测酒杯模态的振型函数。此外,定义陀螺有限元p
在两种酒杯模态下的位移分别为(u
1(p
)、u
1(p
)、u
1(p
))和(u
2(p
),u
2(p
),u
2(p
)),表达式如下
(7)
(8)
那么,(p
)的表达式为两个酒杯模态位移矢量的叠加
(9)
将式(9)代入式(6),可以得到半球谐振陀螺有限元p
的绝对速度(p
)的表达式,将该式平方后得到



Ω
(y
+y
+u
)-Ω
(x
+x
+u
)](10)
式中,u
(p
)=φ
1(p
)q
+φ
2(p
)q
;u
(p
)=φ
1(p
)q
+φ
2(p
)q
;u
(p
)=φ
1(p
)q
+φ
2(p
)q
。最后,将式(10)代入动能T
的表达式(式(4) )进行积分。虽然结果包含许多项,但其中某些项在经过式(2)和式(3)微分后为零,从而可被消除。此外,根据半球谐振陀螺酒杯模态的对称性和正交性,结果表达式还可进一步简化,半球谐振子的等效质量m
和哥氏质量m
的表达式分别为

(11)

(12)
在有限元计算中,通过提取半球谐振子两个酒杯模态在笛卡尔坐标系下的位移分量,构成多维数组=[,,]和=[,,],然后分别提取两个模态所有单元的位移向量和,随后提取最大位移p
和p
,最后提取由每个有限元体积所构成的向量。根据提取的数据,在数值计算软件中通过编译如下两个表达式,计算得到等效质量m
和哥氏质量m
(13)

(14)
式中,N
为网格单元总数。2 半球谐振陀螺有限元建模
建立精确的有限元模型是半球谐振陀螺结构优化设计的基础,半球谐振陀螺的主要结构参数及其网格模型分别如图2(a)和图2(b)所示。在图2(a)中,R
代表半球壳半径,t
代表半球壳厚度,r
代表支撑柱半径,L
代表总支撑柱长度,L
代表上支撑柱长度。设置一组初始的半球谐振子结构参数,参数数据如表1所示,然后仿真出半球谐振子前10阶的模态分布,如图3所示。
表1 半球谐振陀螺初始结构参数 (单位:mm)
(a)半球谐振子的结构参数
(b)半球谐振陀螺的网格模型
图3 半球谐振陀螺的模态分布Fig.3 Modal distribution of HRG
从图3可以看出,随着半球谐振子模态频率的增加,模态振型的波腹点数也随之增加。处于第1阶的是没有波腹的拉压振动模态,在研究半球谐振陀螺动力学问题时一般不考虑此运动;处于第2、3阶的是半球谐振子的摆动;处于第4、5阶的是半球谐振子具有4个波腹最低阶的弯曲模态,也是半球谐振子的工作振型;第6、7阶为半球谐振子和支撑柱的同时振动;第8、9阶为半球谐振子具有6个波腹的弯曲模态;第10阶为半球谐振子沿支撑柱的上下振动。
3 半球谐振子结构参数对工作模态以及进动系数的影响
为了探究半球谐振子的结构参数对工作模态频率、模态位阶和进动系数的影响,为半球谐振子的频率、灵敏度等性能指标的优化设计进行理论铺垫,分别选取半球谐振子的球壳半径R
、球壳厚度t
和支撑柱直径r
作为研究对象,仿真这些参数在不同数值下对半球谐振陀螺固有特性的影响。仿真结果分别如表2、表3和表4所示。
表2 不同球壳半径下的仿真结果
表3 不同球壳厚度下的仿真结果
表4 不同支撑柱半径下的仿真结果
4 仿真结果分析
结合表2、表3和表4的仿真结果,可以得出如下结论:
(1)半球谐振陀螺的工作频率随半球谐振子球壳半径的增大而减少,随球壳厚度和支撑柱半径的增加而增大;
(2)半球谐振子球壳半径的变化对陀螺工作频率的位阶不产生影响,而当球壳厚度与支撑柱半径的比例大于1/3时,陀螺工作模态的固有频率位于第4阶和第5阶。当球壳厚度与支撑柱半径的比例小于1/3时,陀螺工作模态的频率位阶位于第1和第2阶。由于工作模态频率位于容易激发的低阶模态,这能够有效提高陀螺敏感特性;
(3)增加半球谐振子球壳的半径能够拉开陀螺工作模态与干扰模态之间的频差,降低由陀螺干扰模态带来的影响,但其降低程度远小于改变球壳厚度与支撑柱半径所带来的改变。此外,在保持半球谐振子球壳半径不变的情况下,当球壳厚度与支撑柱半径的比例为1∶3时,陀螺工作模态与干扰模态之间的频差最小;
(4)改变半球谐振子球壳半径、球壳厚度和支撑柱半径,对陀螺的进动系数的影响波动很小,基本维持在0.27~0.28内。
5 结 论
本文研究了半球谐振陀螺的结构参数对其工作模态频率、模态频率位阶以及进动系数的影响。在陀螺进动系数计算理论研究的基础上,对半球谐振陀螺的进动因子进行了理论计算;之后,对具有不同结构参数的半球谐振子进行了模态仿真分析,发现在半球谐振子设计过程中,当球壳厚度和支撑柱半径之比小于1/3时,能够将陀螺的工作模态设置于最容易被激发的第1和第2阶模态,大大提高了陀螺敏感特性。同时,能够极大拉开陀螺工作模态与干扰模态之间的频差;最后,发现半球谐振陀螺的进动系数受结构变化而产生的波动非常小,进动系数的波动范围维持在0.27~0.28内。
