滚摆导引头视线角速率提取技术
2021-07-06王帅为梁益铭郑建强杨姝君马季容
王帅为,梁益铭,郑建强,杨姝君,马季容
滚摆导引头视线角速率提取技术
王帅为,梁益铭,郑建强,杨姝君,马季容
(西安现代控制技术研究所,陕西 西安 710065)
滚转摆动式导引头采用滚转摆动两轴极坐标控制形式,外框为滚动框,内框为摆动框,视场可覆盖整个前半球,具有结构简单、重量轻、体积小、成本低等特点,因此非常适用于近程红外防空导弹。本文讨论了滚摆式导引头与偏仰式导引头视线角速率存在的差异,阐述了滚摆式导引头视线角速度存在轴分量的原因。并给出了半捷联式滚摆导引头角速率的获取方式,推导了其简化形式,分析了简化公式使用的条件。仿真结果表明,该简化公式具有较好的近似精度,具有一定的工程应用前景。
滚摆式导引头;偏仰式导引头;视线角速率
0 引言
随着科技的发展,目标的高机动性及大离轴角发射能力对防空导弹提出了更高的要求。滚转摆动式导引头采用滚转摆动两轴极坐标控制形式,外框为滚动框,内框为摆动框,视场可覆盖整个前半球,具有结构简单、重量轻、体积小、成本低等特点,因此非常适用于近程红外防空导弹。但是由于滚摆式导引头不能直接测量视线角速率,因此研究其视线角速率获取方式显得极为重要[1-2]。文献[3-4]对滚仰导引头跟踪平台进行了建模并做了仿真,文献[5-6]指出了滚仰式导引头存在奇异性的原因。文献[7]提出需要用滤波的方法得到目标视线角速度。
本文对滚摆式导引头的视线角速率进行研究,讨论了滚摆式导引头与偏仰式导引头视线角速率存在的差异,推导了角速率的提取公式,并对其做了简化,分析了简化公式的使用条件。
1 坐标系定义
载体基座系bbbb与弹体固连,原点选在外框与内框的交点。bb沿弹轴方向,bb在导弹纵向对称面内与bb垂直,bb通过右手定则确定。
滚摆导引头外框与传统的偏仰式导引头不同的是外框为滚动框,内框为摆动框,如图1所示。外框坐标系wwww与外框固连,描述外框的运动。内框坐标系nnnn与内框固连,描述内框的运动。载体基座系绕其bb轴旋转n到达外框坐标系,外框系绕其轴ww摆动n到达内框坐标系。在导引头稳定跟踪的条件下,可认为内框坐标系nn指向目标。同理,对于偏仰式导引头,如图2所示,两个框架角分别为:k,k。
视线坐标系ssss原点与内框系重合,ss指向目标,ss在铅垂面内与ss垂直,ss通过右手定则确定。定义视线系与惯性系的夹角为目标的高低和方位角记为q与q。

图1 滚摆导引头
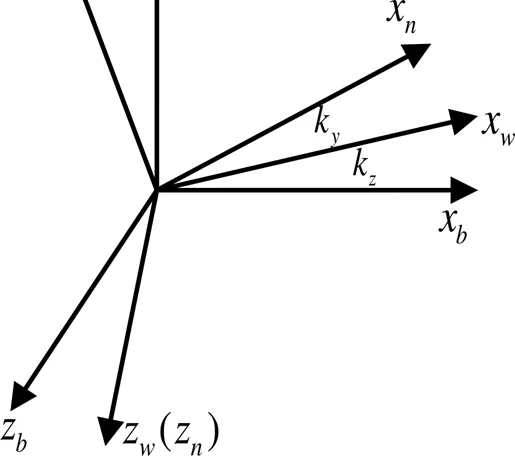
图2 偏仰导引头
2 滚摆式导引头视线角速度绕x轴旋转问题
滚摆导引头跟踪过程中,导引头通过测量目标相对于光轴的像素差,将其转化为滚动框指令与摆动框指令,驱使光轴指向目标。
对于偏仰式平台导引头,由于在内框上安装有速率陀螺,可以测量得到光轴相对于惯性空间的角速度,在导引头稳定跟踪的条件下,即可将此角速度用于制导。但滚摆导引头由于滚动框剧烈滚动,内框系与视线系存在沿视线方向的旋转,导致视线系ss轴与内框系nn轴并不重合,内框系测量的角速度不能直接用于制导,下面详细分析这个问题。

弹目相对量在惯性空间的单位矢量为:

将其投影到弹体系下,得到:


图3 坐标系转化关系
若采用滚摆式导引头,弹目相对量在弹体系也可表示为:

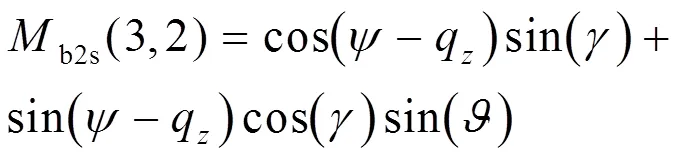
其中:

或:

由于弹体系到视线系的转化矩阵为:

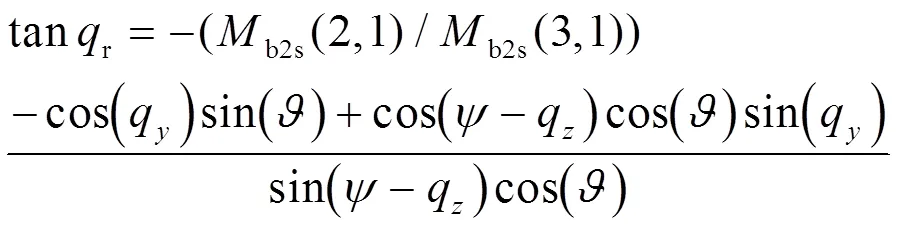
则易得视线系和内框系的扭角r为:

导弹滚转角和导引头滚转框架角之和+n为:

若制导方式采用比例导引:

若采用偏仰式导引头,视线系和内框系的扭角r为:

其中:

若≫t,则®0,故q≈。即扭角近似等于导弹滚转角。
由上述分析可知,当采用偏仰式导引头,弹体采用三通道倾斜稳定控制时,导弹滚转角很小,故导引头测量系输出的角速度可以近似认为等于视线系角速度。
但采用滚摆式导引头时,由于滚动框高速转动,导引头测量系与视线系差别很大,故不能直接用测量系的视线角速度制导。
3 滚摆式导引头视线角速度获取方式
若滚摆导引头内框上未安装速率陀螺,只能通过码盘获得框架角,需要综合弹上惯导信息对视线角速度进行重构。
内框系测量的角速度包含3部分,一是弹体相对惯性空间的角速度,二是外框相对于弹体的角速度,三是内框相对于外框的角速度,将其都投影到内框系,即:

故:

non又可用q、q、q表示为:

由于制导需要的是视线系视线角速度,即:

沿视线的旋转不影响角速度的俯仰偏航分量,故可将内框角速度按r做逆向分解,即可用于制导。

由表达式可以看出,r与q、q-q-相关。
由图4可以看出,当俯仰跟偏航框架角很小时,用+n近似r有很高的精度。当俯仰视线角在20°以内,俯仰偏航框架角在10°以内时,误差角(+n)-r不超过5°。随着框架角的绝对值增大,误差角逐渐增大。随着俯仰视线角的增大,误差角也逐渐增大。当俯仰视线角增大到40°时,误差角最大到16°左右。此时俯仰姿态角已经接近60°。因此在大部分情况下,应用上述公式近似的误差角不超过15°。

4 仿真验证
设目标高度4500m,速度400m/s,交汇距离10000m,航路捷径2000m。导弹平均速度600m/s,导航比=4。仿真结果如图5、图6所示。
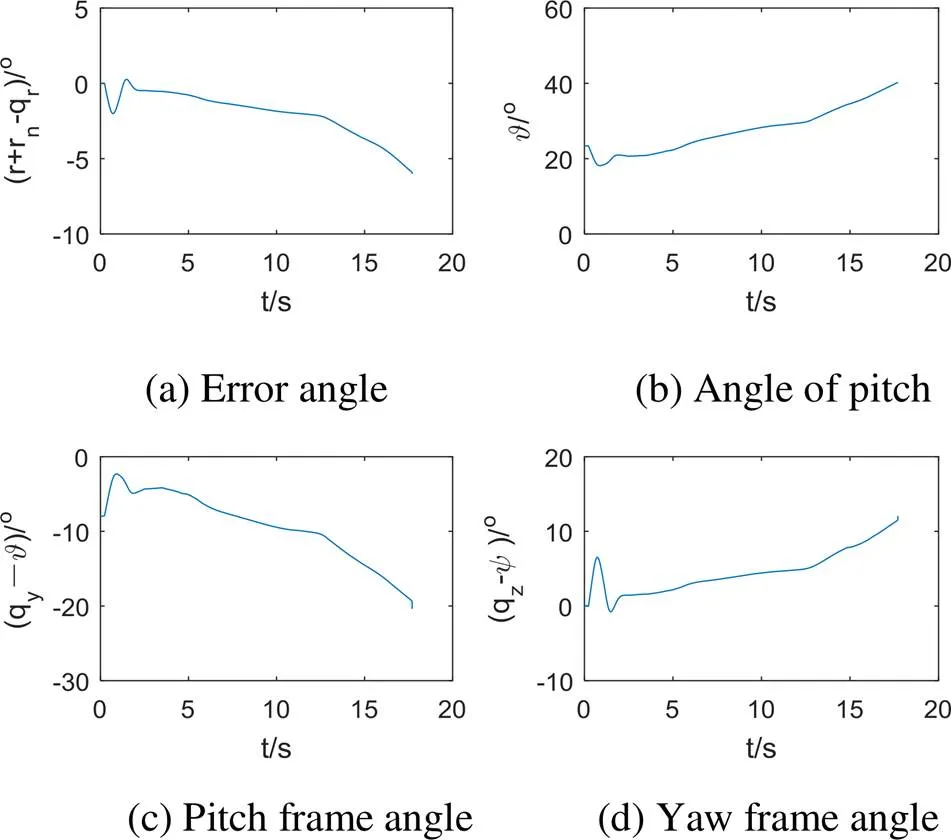
图5 误差角、俯仰角、框架角与时间的关系

图5中(a)为r与+n之差,(b)为导弹姿态角,(c)为俯仰框架角,(d)为偏航框架角。由图可知,导弹俯仰姿态角最大为40°,俯仰框架角绝对值最大为-20°,偏航框架角最大为10°左右,误差角最大不超过6°。由图6可知理想的视线角速度跟近似的相差无几,表明简化公式r≈+n在一定条件下是适应的。
5 结论
本文讨论了滚摆式导引头与偏仰式导引头视线角速率存在的差异,阐述了滚摆式导引头存在绕轴角速度的原因。并给出了半捷联式滚摆导引头角速率的获取方式,推导了其简化形式,分析了简化公式使用的条件。经过数字仿真,对比了理论视线角速度和简化公式求取的视线角速度,结果表明该简化公式具有较好的近似精度,有一定的工程应用前景。
[1] 祁载康. 制导弹药技术[M]. 北京: 北京理工大学出社, 2002.
QI Zaikang.[M]. Beijing: Beijing Institute of Technology Press, 2002.
[2] Glasgow B, Bell W. The future of anti-aircraft imaging infrared seeker missile threats[C]//1999, 1999, 4: 457-465.
[3] 肖任鑫, 张聘义. 滚俯仰式红外导引头稳定平台控制与仿真[J]. 红外与激光工程, 2007, 36: 363-365.
XIAO Renxin, ZHANG Pinyi. Control and simulation of stabilization platform for roll-pitch infrared seeker[J]., 2007, 36: 363-365.
[4] 王志伟, 祁载康, 王江. 滚-仰式导引头跟踪原理[J]. 红外与激光工程, 2008, 37(2): 274-277.
WANG Zhiwei, QI Zaikang, WANG Jiang. Tracking principle for roll-pitch seeker[J]., 2008, 37(2): 274 -277.
[5] 林德福, 王志伟, 王江. 滚仰式导引头奇异性分析与控制[J]. 北京理工大学学报, 2010, 11(11): 1265-1269.
LIN Defu, WANG Zhiwei, WANG Jiang. Singularity analysis of roll- pitch seeker and its control strategy[J]., 2010, 30 (11): 1265-1269.
[6] 孙志朋, 赵世明, 孙致月. 红外成像制导半实物仿真安装误差分析与修正[J]. 红外技术, 2020, 42(2): 139-143.
SUN Zhipeng, ZHAO Shiming, SUN Zhiyue. Infrared imaging guidance semi-physical simulation, installation error analysis, and correction [J]., 2020, 42(2): 139-143.
[7] 王霞, 朱妍, 钱帅, 等. 一种红外导引头注入式试验中目标场景复杂度的评估方法[J]. 红外技术, 2019, 41(9): 874-881.
WANG Xia, ZHU Yan, QIAN Shuai, et al. Target scene complexity metrics based on digital image injection test for IR imaging seeker[J]., 2019, 41(9): 874-881.
Method of LOS Rate Extraction for Roll-Pitch Infrared Seekers
WANG Shuaiwei,LIANG Yiming,ZHENG Jianqiang,YANG Shujun,MA Jirong
(,710065,)
Roll-pitch seekers adopt the polar coordinate control form of rolling and pitching two axes. The outer frame is the rolling frame, the inner frame is the pitching frame, and the field of view can cover the entire front hemisphere. They have a simple structure, light weight, small volume, and low cost; therefore, they are very suitable for short-range infrared air defense missiles. This paper discusses the difference between the line-of-sight rates of roll–pitch seekers and pitch–yaw seekers and expounds the reason why roll–pitch seekers rotate around theaxis. The method of obtaining the line-of-sight rate of the roll–pitch seeker is given, the simplified form is deduced, and the conditions for using the simplified formula are analyzed. The simulation results show that the simplified formula has good approximation accuracy and certain engineering application prospects.
roll-pitch seeker, pitch-yaw seeker, line of sight rate
TJ765.1
A
1001-8891(2021)06-0592-05
2020-07-15;
2021-05-28.
王帅为(1992-),男,陕西渭南人,助理工程师,硕士,研究方向:导航制导与控制。E-mail:2504715546@qq.com。