基于TMS320F28075的永磁同步电机无位置传感器控制
2021-07-02尹胜利王春秀
尹胜利,王春秀
(1.贵州航天林泉电机有限公司,贵阳550081;2.北京航天时代激光导航技术有限责任公司,北京100094)
0 引言
近年来,永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)因其结构简易、功率密度高、效率高等突出优点而被广泛应用于家电、工控、导航等领域[1-3]。PMSM双闭环控制需利用位置传感器提供转子位置信息,常用的位置传感器分为光电编码器、霍尔传感器、旋转变压器等。然而,位置传感器有可能发生损坏,在部分有容错控制需求的特殊应用中,要使用无位置传感器算法代替出现故障的位置传感器完成实时获取转子位置信息的功能。此外,无位置传感器算法也能完全取代位置传感器,从而有效降低系统成本与体积。
近年来,无位置传感器控制方法始终是PMSM控制领域的研究热点。无位置传感器控制方法主要可分为两类:一类是基于反电动势或磁链估计,主要适用于中高速范围,如滑模观测器、非线性观测器、Kalman滤波器、磁链观测器等[4-7];另一类则是基于凸极效应的高频注入方法,主要适用于较低速范围,如脉振高频注入法、旋转高频注入法、方波高频注入法等[8-10]。目前,还没有能够适用于全速度范围的方法。一般的解决方式是在零低速段使用高频注入法或I/f起动等方法,在中高速段则切换至基于反电动势或磁链的方法。切换过程中可能会出现抖动等问题,可在过渡区间对两类方法所得位置或速度信息进行加权处理。
在基于反电动势或磁链观测的策略中,反电动势滑模观测器是一种较为简单实用的方法,但反电动势是通过滤波方式获取,所以需要对位置信息估计值进行相位补偿。部分改进方法则利用了反电动势的扩展状态模型,构造全阶观测器,以达到不使用相位补偿的目的,但缺点是需要多进行一部分运算,而且算法中会使用速度估计值,这增加了算法复杂度。
本文在实现以德州仪器公司的浮点型DSP产品TMS320F28075为控制核心的永磁同步电机控制系统的基础上,使用了一种非线性观测器,然后通过反正切运算提取位置与速度信息,该观测器具有结构简单、无需使用速度估计信息等优点。本文对一台750W的电机进行了实验测试,实验结果验证了该非线性观测器的有效性。
1 控制系统设计
1.1 硬件设计
图1为永磁同步电机无位置传感器控制系统的硬件设计框图。本文采用TI公司生产的浮点型DSP产品TMS320F28075作为数字控制器,数字控制器的主要功能为接收转速控制指令、监测电流信号、完成所有软件算法等。本文选用霍尔电流传感器采集三相电流信号,电流采样信号经过信号调理电路后输入至DSP的模-数转换器(ADC)外设。其中,信号调理电路使用运算放大器及其外围电路实现低通滤波与放大等功能。由DSP输出6路PWM信号,经驱动单元放大后,控制IGBT器件通断,从而生成电压信号。
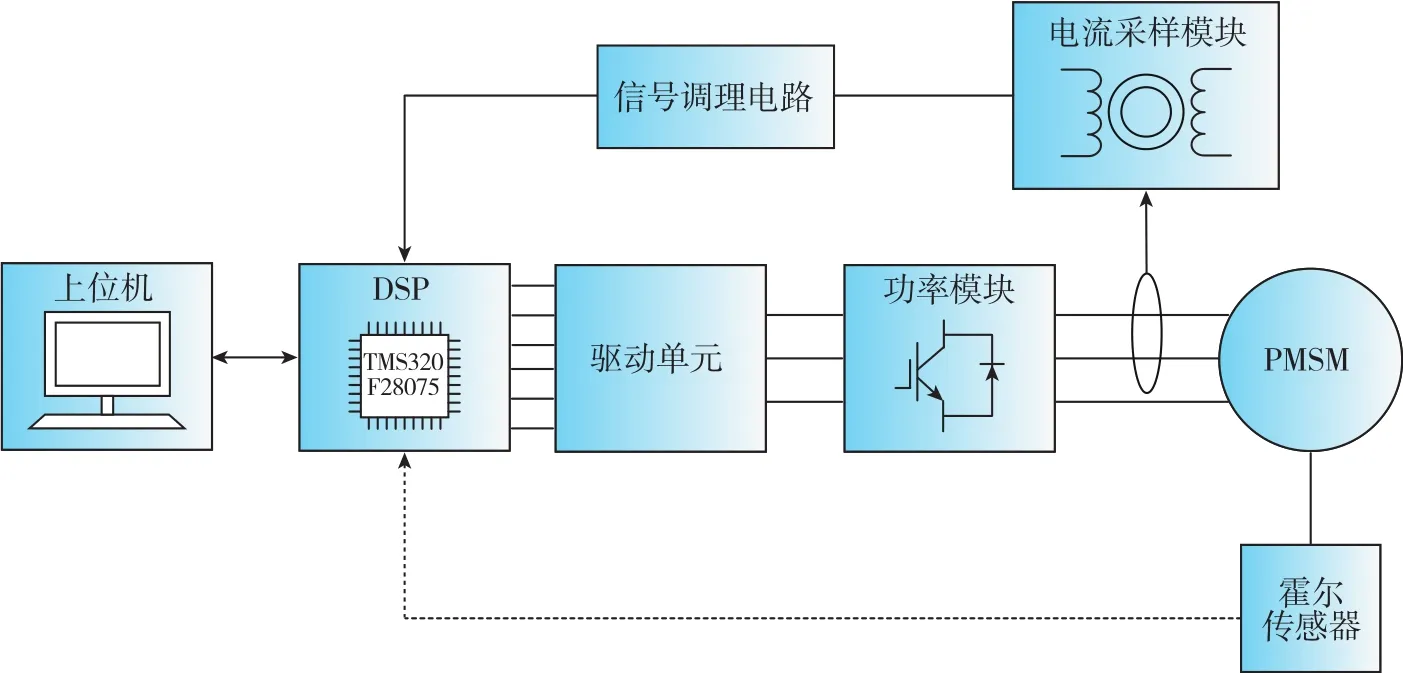
图1 永磁同步电机无位置传感器控制系统硬件框图Fig.1 Hardware block diagram of the sensorless control system for PMSM
1.2 软件设计
ADC有多种触发方式,要保证电流值尽量准确,应选择在PWM计数器发生上溢时触发SOC单元,然后再进行采样。为保证两路电流信号采集的同步性,分别在ADCA与ADCB的SOC0通道对两路信号进行转换。电机控制信号为三组互补PWM波,所以需要设置三组周期相同且同步输出的ePWM外设。ePWM外设为同步链式结构,为保证三组PWM波的同步性,通过软件配置使ePWM7、ePWM8、ePWM9与 ePWM4模块同步,并由ePWM4模块触发ADC外设的电流采样程序,而ePWM4模块本身并不输出PWM信号。
矢量控制程序在ADC中断中执行,算法流程图如图2所示。首先,通过ADC进行电流信号采样,同时获取位置与转速信息,进行矢量变换得到旋转坐标系下的电流值。然后,进行速度环与电流环运算。最后,经过反Park变换后,电流环输出的电压指令输入到SVPWM模块中计算电压矢量作用时间,并由ePWM模块输出PWM调制波,通过功率器件生成电压控制信号。由于无位置传感器算法相当于低分辨率的位置传感器,一般情况下,在速度环与电流环参数调试过程中,应设置较低的带宽。
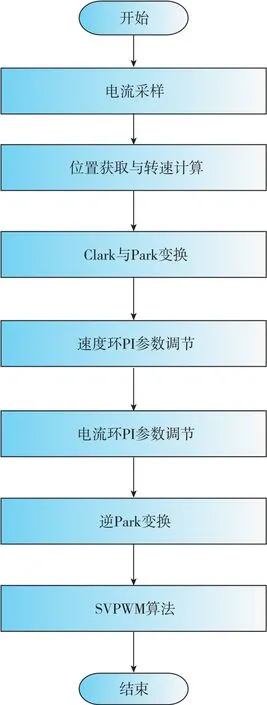
图2 PMSM矢量控制方法流程图Fig.2 Flowchart of the vector control method for PMSM
2 无位置传感器控制方法
2.1 永磁同步电机模型
PMSM在静止坐标系下的电气模型为

式(1)、 式(2)中,uα、uβ分别为α轴、β轴的电压(V),iα、iβ分别为α轴、β轴的电流(A),eα、eβ分别为α轴、β轴的反电动势(V),Rs为定子电阻(Ω),Ls为定子电感(H)。
静止坐标系下的反电动势方程为

式(3)、 式(4)中,ψf为永磁体磁链(Wb),ωe为转子电角速度(rad/s),θe为转子电角度(rad)。 由式(3)、式(4)可知,反电动势模型中包含速度信息。因此,如果以扩展反电动势方程为基础构造无位置传感器算法,则要将速度估计值迭代到算法中,这增加了算法复杂度。
2.2 非线性观测器算法及其离散化
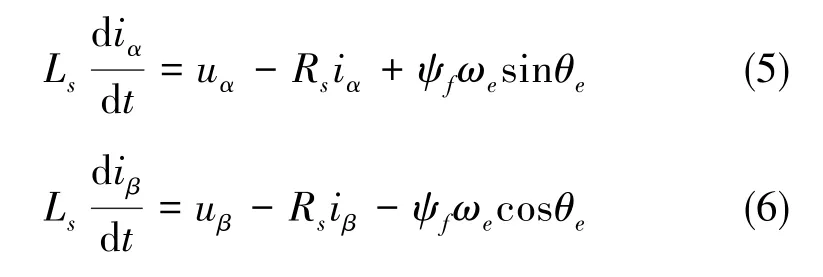
本文使用的非线性观测器仅利用电机模型,不直接使用反电动势的扩展状态方程,所以不会出现速度项。 将式(3)、 式(4)分别代入式(1)、式(2)中, 则式(1)、 式(2)变换为
定义非线性观测器中的状态变量


对式(7)、 式(8)求导, 有

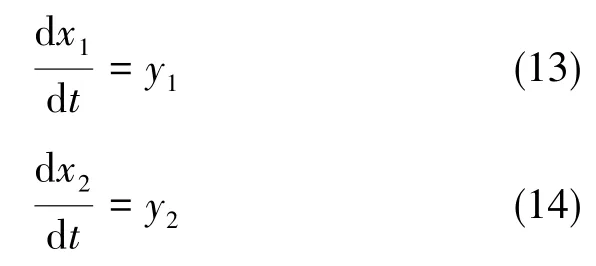
定义新变量y1与y2

将式(9)、 式(10)代入式(5)、 式(6)中, 可得如式(13)、式(14)所示的微分方程关系,该微分方程作为构造非线性观测器的基础模型。
定义如下映射关系
根据式(7)、 式(8)、 式(15)、 式(16), 可得

以式(13)、 式(14)所构造的模型为基础, 非线性观测器可表示为式(19)、式(20)的形式。该观测器以时变系数为增益,永磁体磁链平方值作为输出,文献[11]证明了该类非线性观测器结构的稳定性。

式(19)、 式(20)中, 符号 “^” 表示该变量的估计值,λ为观测器中唯一需要调节的参数(λ>0)。
本文不使用锁相环、速度观测器等复杂方法,而是直接使用反正切方法获取位置与速度信息。根据式(18),可得如下关系


综上所述,无位置传感器估算方法框图如图3所示。

图3 无位置传感器估算方法框图Fig.3 Block diagram of the sensorless estimation method
下面对观测器算法进行离散化处理,以符合数字控制要求。设Ts为系统采样频率,使用前向差分法对式(19)、式(20)进行变换,可得如下关系
对式(21)、 式(22)进行离散化, 最终得到位置与速度的数字计算方式

3 实验验证
3.1 实验平台介绍
基于TMS320F28075型DSP的永磁同步电机实验平台如图4所示。实验用电机功率为750W,相电阻为0.72Ω,相电感为3.93mH,永磁体磁链为0.06Wb,极对数为5。使用观测器法估计转子位置并参与矢量控制算法,观测器参数λ取2000,PWM斩波与中断频率均为10kHz。
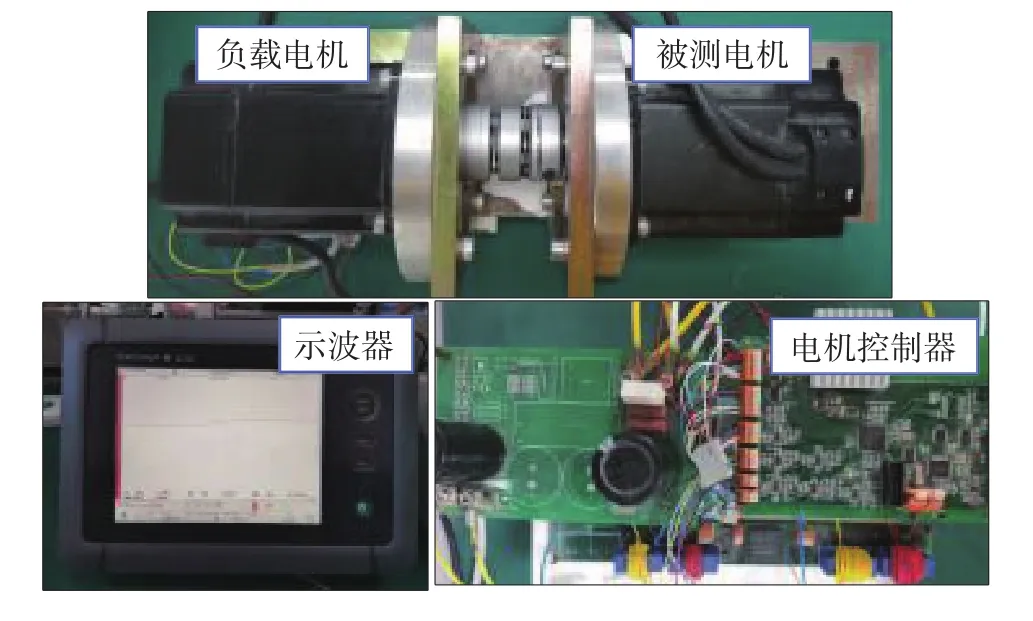
图4 实验平台示意图Fig.4 Diagram of experiment setup
同时,使用三个开关型霍尔传感器获取电机转子位置并估计速度,但不参与矢量控制,仅用作与非线性观测器法所得结果进行比对,利用DSP自带的DAC(数-模转换器)外设将实验数据发送至示波器中。
3.2 实验结果及分析
所使用的观测器法无法较为稳定地实现零低速区双闭环控制,因此在实验测试中使用了I/f启动方法。首先,利用电流环与位置角给定令电机定位于电角度为0的位置;然后,通过电流环设置转矩分量,通过位置角给定使电机逐步加速,当加速至一定转速后,此时观测器已经较为稳定,再切换至基于观测器的双闭环无位置传感器控制模式。
图5为电角速度分别为300rad/s与450rad/s时霍尔传感器与无位置传感器算法所得电机转子位置估计值对比。由实验结果可知,两种方法所得位置估计值较为相近。因此,基于该非线性观测器的方法能够较为准确地获取转子位置信息。图6为电角速度分别为300rad/s与450rad/s时两种估计方式的速度估计偏差。由实验结果可知,两种方法所得速度估计值较为接近,且估计偏差在15rad/s内,说明该观测器具有良好的速度跟踪能力。综上分析,由图5、图6的实验结果,该非线性观测器能够较好地跟踪电机转子的位置与速度,并将估计结果用于矢量控制算法。


图5 霍尔传感器与观测器法估计位置对比Fig.5 Comparison of positions estimated by Hall sensors and observer-based method

图6 霍尔传感器与观测器法速度估计偏差Fig.6 Deviations of speed estimated by Hall sensors and observer-based method
为验证该非线性观测器的暂态响应能力,测试了速度指令由300rad/s阶跃为450rad/s时的速度状态,图7为速度响应波形测试结果。可以看出,电机速度能够响应速度阶跃指令,并在200ms内由300rad/s上升到450rad/s,经暂态过程后可继续保持稳定。因此,该观测器具有一定的暂态响应能力,能有效应对转速变化情况。
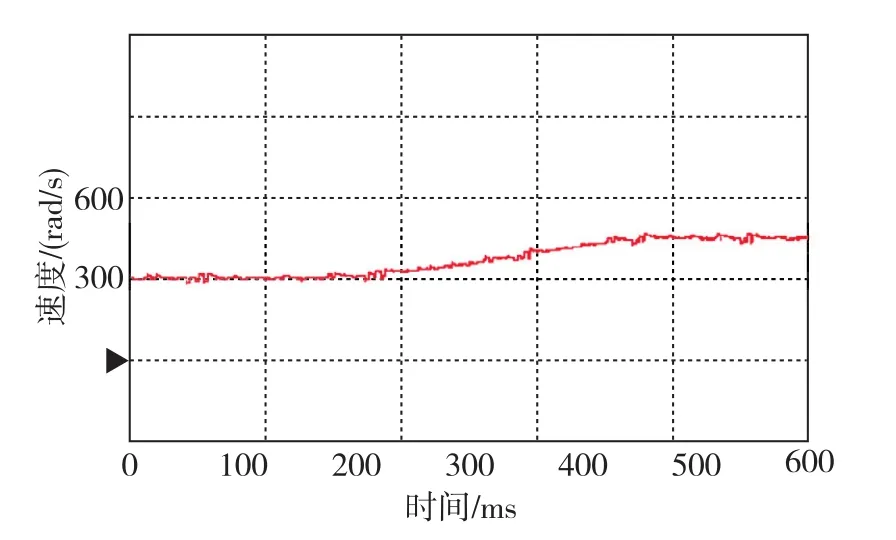
图7 速度响应波形Fig.7 Waveform of speed response
4 结论
无位置传感器控制由于取消了位置传感器,使得系统结构更加简单,安装更加方便,成本低、可靠性高、抗干扰能力强等优点越来越受到重视,并得到迅速发展。本文对利用非线性观测器法实现无位置控制技术进行了研究,基于德州仪器DSP产品TMS320F28075,使用了一种基于非线性观测器的方法实现了永磁同步电机的无位置传感器控制。与一般的全阶观测器相比,该非线性观测器无需使用转子速度信息,所以观测器结构简单,且易于数字化实现,转子位置与速度信息可通过反正切及微分计算获取。最后,使用750W电机实验平台验证了无位置传感器算法,实验结果表明:该观测器能够较准确地估计出电机转子的位置与速度,并用于闭环矢量控制结构。
