基于传感器融合技术的自动感应寻车系统设计
2021-07-01邱小红
邱小红
摘 要:传统寻车系统的自动感应寻车时间较长,寻车效果较差,因此本文设计基于传感器融合技术的自动感应寻车系统。选择STM32F103主控芯片与AD9854信号发生芯片,设计车辆传感器与超声波传感器;建立自动寻车功能模块,细化系统功能;基于传感器融合技术预测用户停车行为,提高寻车时间;集成自动寻车终端,进而实现自动感应寻车效果。通过对比实验验证新系统的寻车时间更短,寻车效果更佳,达到了系统设计目的。
关键词:传感器融合技术;自动感应;寻车系统;主控芯片
中图分类号:U121 文献标识码:A
1硬件设计
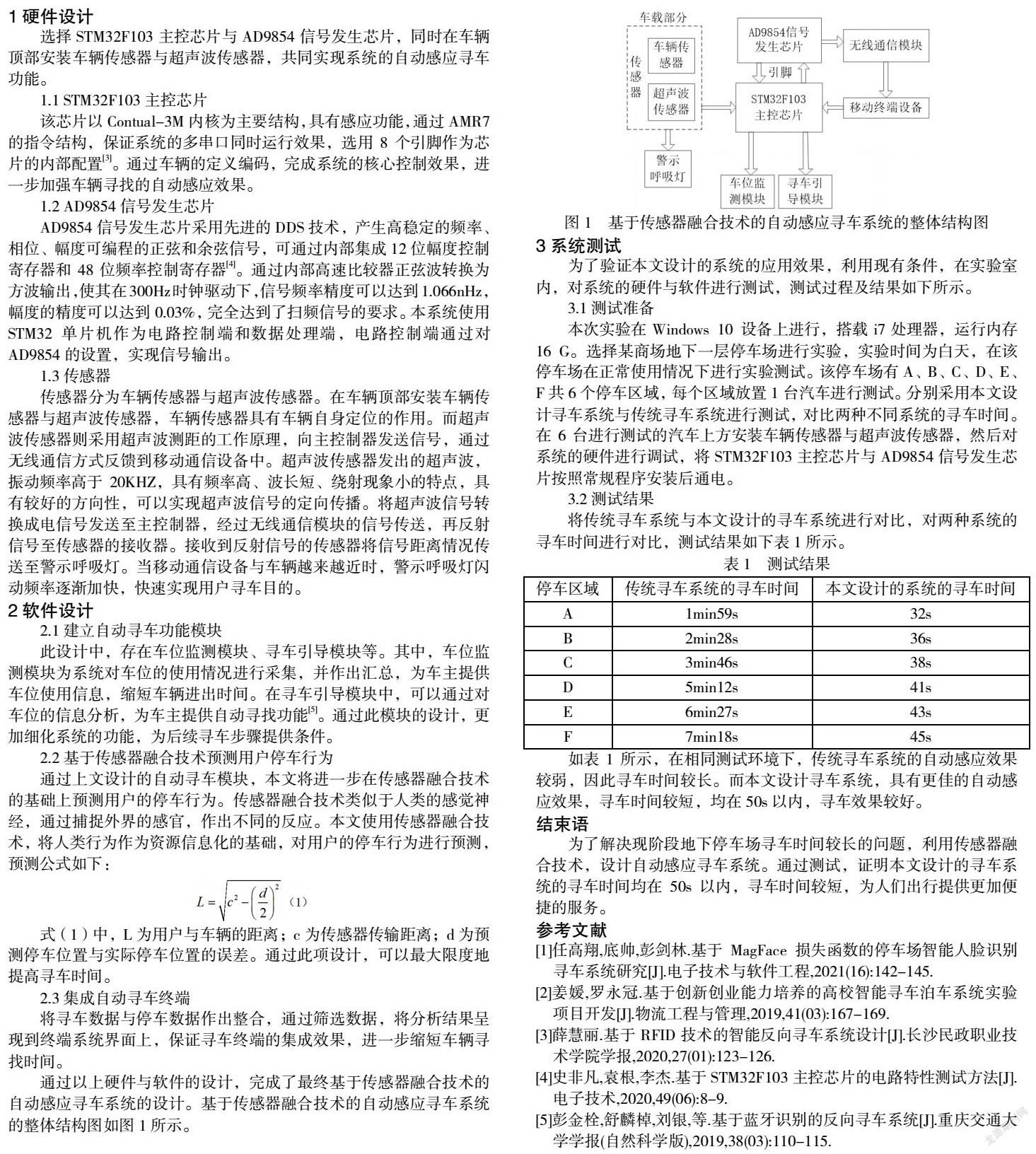
选择STM32F103主控芯片与AD9854信号发生芯片,同时在车辆顶部安装车辆传感器与超声波传感器,共同实现系统的自动感应寻车功能。
1.1 STM32F103主控芯片
该芯片以Contual-3M内核为主要结构,具有感应功能,通过AMR7的指令结构,保证系统的多串口同时运行效果,选用8个引脚作为芯片的内部配置[3]。通过车辆的定义编码,完成系统的核心控制效果,进一步加强车辆寻找的自动感应效果。
1.2 AD9854信号发生芯片
AD9854信号发生芯片采用先进的DDS技术,产生高稳定的频率、相位、幅度可编程的正弦和余弦信号,可通过内部集成12位幅度控制寄存器和48位频率控制寄存器[4]。通过内部高速比较器正弦波转换为方波输出,使其在300Hz时钟驱动下,信号频率精度可以达到1.066nHz,幅度的精度可以达到0.03%,完全达到了扫频信号的要求。本系统使用STM32单片机作为电路控制端和数据处理端,电路控制端通过对AD9854的设置,实现信号输出。
1.3传感器
传感器分为车辆传感器与超声波传感器。在车辆顶部安装车辆传感器与超声波传感器,车辆传感器具有车辆自身定位的作用。而超声波传感器则采用超声波测距的工作原理,向主控制器发送信号,通过无线通信方式反馈到移动通信设备中。超声波传感器发出的超声波,振动频率高于20KHZ,具有频率高、波长短、绕射现象小的特点,具有较好的方向性,可以实现超声波信号的定向传播。将超声波信号转换成电信号发送至主控制器,经过无线通信模块的信号传送,再反射信号至传感器的接收器。接收到反射信号的传感器将信号距离情况传送至警示呼吸灯。当移动通信设备与车辆越来越近时,警示呼吸灯闪动频率逐渐加快,快速实现用户寻车目的。
2软件设计
2.1建立自动寻车功能模块
此设计中,存在车位监测模块、寻车引导模块等。其中,车位监测模块为系统对车位的使用情况进行采集,并作出汇总,为车主提供车位使用信息,缩短车辆进出时间。在寻车引导模块中,可以通过对车位的信息分析,为车主提供自动寻找功能[5]。通过此模块的设计,更加细化系统的功能,为后续寻车步骤提供条件。
2.2基于传感器融合技术预测用户停车行为
通过上文设计的自动寻车模块,本文将进一步在传感器融合技术的基础上预测用户的停车行为。传感器融合技术类似于人类的感觉神经,通过捕捉外界的感官,作出不同的反应。本文使用传感器融合技术,将人类行为作为资源信息化的基础,对用户的停车行为进行预测,预测公式如下:
式(1)中,L为用户与车辆的距离;c为传感器传输距离;d为预测停车位置与实际停车位置的误差。通过此项设计,可以最大限度地提高寻车时间。
2.3集成自动寻车终端
将寻车数据与停车数据作出整合,通过筛选数据,将分析结果呈现到终端系统界面上,保证寻车终端的集成效果,进一步缩短车辆寻找时间。
通过以上硬件与软件的设计,完成了最终基于传感器融合技术的自动感应寻车系统的设计。基于传感器融合技术的自动感应寻车系统的整体结构图如图1所示。
3系统测试
为了验证本文设计的系统的应用效果,利用现有条件,在实验室内,对系统的硬件与软件进行测试,测试过程及结果如下所示。
3.1测试准备
本次实验在Windows 10 设备上进行,搭载i7处理器,运行内存16 G。选择某商场地下一层停车场进行实验,实验时间为白天,在该停车场在正常使用情况下进行实验测试。该停车场有A、B、C、D、E、F共6个停车区域,每个区域放置1台汽车进行测试。分别采用本文设计寻车系统与传统寻车系统进行测试,对比两种不同系统的寻车时间。在6台进行测试的汽车上方安装车辆传感器与超声波传感器,然后对系统的硬件进行调试,将STM32F103主控芯片与AD9854信号发生芯片按照常规程序安装后通电。
3.2测试结果
将传统寻车系统与本文设计的寻车系统进行对比,对两种系统的寻车时间进行对比,测试结果如下表1所示。
如表1所示,在相同测试环境下,传统寻车系统的自动感应效果较弱,因此寻车时间较长。而本文设计寻车系统,具有更佳的自动感应效果,寻车时间较短,均在50s以內,寻车效果较好。
结束语
为了解决现阶段地下停车场寻车时间较长的问题,利用传感器融合技术,设计自动感应寻车系统。通过测试,证明本文设计的寻车系统的寻车时间均在50s以内,寻车时间较短,为人们出行提供更加便捷的服务。
参考文献
[1]任高翔,底帅,彭剑林.基于MagFace损失函数的停车场智能人脸识别寻车系统研究[J].电子技术与软件工程,2021(16):142-145.
[2]姜媛,罗永冠.基于创新创业能力培养的高校智能寻车泊车系统实验项目开发[J].物流工程与管理,2019,41(03):167-169.
[3]薛慧丽.基于RFID技术的智能反向寻车系统设计[J].长沙民政职业技术学院学报,2020,27(01):123-126.
[4]史非凡,袁根,李杰.基于STM32F103主控芯片的电路特性测试方法[J].电子技术,2020,49(06):8-9.
[5]彭金栓,舒麟棹,刘银,等.基于蓝牙识别的反向寻车系统[J].重庆交通大学学报(自然科学版),2019,38(03):110-115.
