基于改进ResNet残差网络模型的交通标志识别
2021-06-29黄尚安
黄尚安
(江门职业技术学院,广东 江门529090)
伴随着人工智能技术的发展和普及,汽车工业正在经历一场深度的智能化技术革命。车辆对于交通现场的智能化理解能力尤为重要,而实现交通标志的识别又是其重要的技术环节。根据交通标志的特征,研究构建一种新的交通标志识别方法,力求在控制模型计算量的基础上,进一步提高交通标志的识别精度。
A Marchisio等人提出一种低延迟节能胶囊网络,采用非占优排序遗传算法,能够在保证交通标志高精度识别的基础上,控制模型的计算量[1];O Araar等人为了避免标记数据的繁琐过程以及模型计算量的增加,提出了一种使用合成交通标志图像的CNN卷积神经网络模型,取得了不错的成绩[2];M Singh等人提出了一种基于输入空间对齐的鲁棒性训练方法,他们在输入图像与解释映射之间的空间相关性上给出了属性脆弱性的上线,并且使用软边缘三重态损失最小化这个上限来学习稳健的特征,最终在交通标志识别GTSRB数据集得到了99.52 %的好成绩[3];A Bouti等人提出一种改进的LeNet卷积神经网络模型,GTSRB数据集的测试精度达到了99.61 %,但模型训练迭代的时间有待优化[4];A Hechri等人提出了一种“两阶段”交通标志识别模型,首选通过HOG和支持向量机进行交通标志检测,然后构建CNN模型进行识别,识别精度达到99.7 %,但模型的计算量依然有待进一步控制[5]。
如何能够在保证交通标志识别精度的基础上,依然可以很好控制模型训练迭代的时间以及计算量是研究人员一直以来要攻克的技术难点。本文根据交通标志本身的特点,研究构建一种基于改进ResNet残差网络的交通标志识别方法,并通过计算机训练网络模型,得到本模型在交通标志识别公共数据集GTSRB上的结果。
1 方法设计
1.1 ResNet残差学习单元
构建基于CNN卷积神经网络的目标分类模型,会伴随网络的深入出现一系列问题,其中就有模型梯度爆炸、消失的问题,而ResNet残差网络的出现,能很好地解决这个问题,如图1为模型中的残差学习单元以及瓶颈结构示意图[6]。

图1 残差学习单元、瓶颈结构示意图
如图1所示,如果首个卷积层的权重是W[m],且有偏置参数b[m]、加权输入Z[m],则有:

把下一个加权输入Z[m+1]令成F(x),既有:

在瓶颈结构中,如果引入一个映射,且这个映射为W[s],则有:

1.2 构建八块结构的ResNet残差网络模型
如何能够加深提取数据集图像的特征信息,是进一步提高交通标志分类精度的关键所在,图2为本文设计构建的“八块结构的ResNet残差网络模型”,且使用卷积核大小、网络层数及像素大小等相关参数都已在图中标明。研究根据交通标志本身的特点,合理搭建包含批量标准化层、激活函数层、卷积层、池化层等网络层,并引入残差学习单元,是构建此模型的重点。

图2 八块结构的Re s Ne t残差网络模型
第一、二块为模型的图像预处理部分,在模型的数据入口,重点使用批量标准化层(Batch Normalization层)[7],能够让图像的特征数据在一开始就拥有较为一致的分布,其核心是计算批量上面的均值及标准差,从而调整网络层的数据输出,为后续结构的特征提取奠定基础。
第三、四块为模型特征提取的初步阶段:且开始引入残差学习单元,并且着重使用PReLU激活函数(Parametric Rectified Linear Unit)[8]。ReLU激活函数会使得卷积层的特征提取变得冗余,而PReLU就可以很好解决这个问题。实际上ReLU激活函数经过相关参数的调整就可以得到PReLU,故通过增加较少且可控的计算量,就可以优化ReLU激活函数带来的问题。
第五、六块为模型特征提取的核心阶段:在继续引入残差学习单元的基础上,进一步引入最大池化层[9]及dropout层[10]。引入最大池化层首先可以完成图像特征图下采样的工作;其次可以对提取的特征图信息进行压缩,将相关不必要的冗余信息进行删除,降低模型计算量;最后还可以扩大卷积层提取特征图信息的感受野,由于交通标志识别需要提取更多细节特征,故最大池化层可以在特征提取的核心阶段较好完成这三项工作。而第六块中增加的dropout层,可以更好地配合ResNet残差学习单元,防止过拟合的情况出现。在网络模型的多次训练迭代中,dropout层可以更新相关参数,从而保证特征图信息提取的效率,代价是增加模型的计算量,但是这些额外的计算量可以通过批量标准化层及最大池化层等模型整体设计而控制。
第七、八块为模型特征提取的收尾阶段:依然在引入残差学习单元的基础上,反复使用卷积核参数为1×1及3×3的卷积层,梯次配置,加深对交通标志特征图的信息提取。收尾阶段的残差学习单元,可以在保证卷积层特征提取效率的基础上,进一步获得更深层次的信息,提高对交通标志的识别精度,最终通过全连接层和Softmax完成数据输出。
构建此模型的设计思想是:“梯次配置、分段提取、步步加深、相辅相成”。经过图像的预处理部分,后续特征提取的网络结构,全部引入残差学习单元,避免伴随网络的加深,出现过拟合及梯度爆炸、消失的问题。且反复使用的批量标准化层及最大池化层,能较好控制模型计算量,避免出现模型训练迭代时间过长,参数量过大的问题,力求让模型在获得优秀分类精度的基础上,还可以减少模型训练迭代的耗时。
1.3 对数似然代价函数
构建模型使用对数似然代价函数,如果样本的数量用M表示,则样本用x表示,标签用y表示,权重向量用θ表示,则有:

对数似然代价函数在梯度下降的过程中,计算量可以得到较好控制,会使得所提模型训练迭代的耗时进一步缩短。
2 实验结果及分析
2.1 计算机仿真平台及配置
提出模型使用深度学习框架-Caffe[11]来完成计算机仿真测试,此实验使用的计算机平台配置:操作系统:Ubuntu 18.04 ,处理器:Intel酷睿i7 11700K,显卡:8G GeForce GTX1080,内存条的大小是32G。
2.2 实验数据集
实验使用交通标志识别公共数据集GTSRB[12],数据集共包含43种不同类型的交通标志图像,图像中最小的像素为15×15,最大的像素为222×193,且交通标志所处环境各不相同,有阳光下的、过度遮光的、过度曝光的、雨雾天气下及遮挡的,如图3所示。

图3 GTSRB公共数据集
2.3 实验结果及分析
数据集图片进入构建的网络模型之前,将像素大小统一调整为28×28,且采用Adam算法来完成模型的训练迭代。学习率的设置如果过大,则模型刚开始训练时容易损失相关数值,发生数据的振荡;设置如果过小,则模型训练容易出现过度拟合的现象,且模型训练迭代的收敛速度会变慢。本实验刚开始训练时,学习率设置为0.01 ,往后第10轮设置为0.001 ,再往后第15轮设置为0.0001 ,图4为模型迭代次数达到150次时的收敛情况曲线。
如图4所示,当模型训练迭代至30次左右时,代价函数曲线已经得以收敛,可以迅速降下来;训练迭代至90次以后,代价函数值向横轴靠拢。实验结果表明,构建模型能够获得非常优秀的训练结果。模型在Caffe上的测试精度达到了99.74 %,图5为模型迭代次数与测试精度之间的关系图。

图4 模型代价函数曲线图
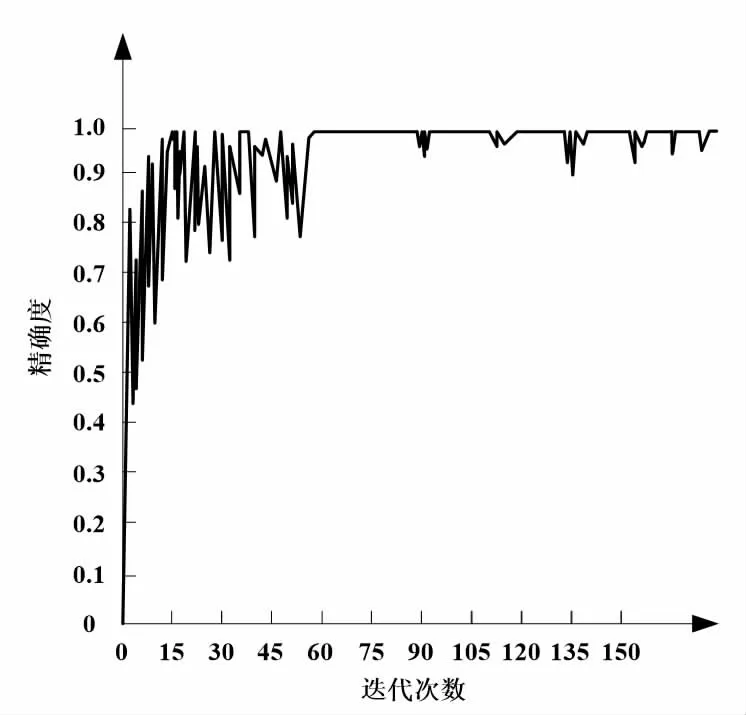
图5 模型精确度与迭代次数关系图
本文方法和当前其它算法精确度对比,如表1所示。

表1 与当前其他方法的结果比较
通过和当前较多方法实验结果的对比,本文提出的算法模型获得了较为优秀的结果,模型较好控制了计算量大小,同时获得了优秀的分类精度。
3 结论
本文提出了一种基于改进ResNet残差网络的交通标志识别方法。根据交通标志本身的特点,构建“八块结构的ResNet残差网络”模型,并结合对数似然代价函数,层层递进,加深特征图信息提取。所提模型可以在较快训练迭代的基础上,获得优秀的分类精度。下一步,还将继续研究基于CNN卷积神经网络的交通标志识别,以期获得更快的识别速度,更高的分类精度。
