电动飞机气动焦点辨识及飞行试验研究
2021-06-28李亚东张子军张钧尧杨凤田
李亚东,张子军,张钧尧,杨凤田
(1.沈阳航空航天大学 辽宁省通用航空重点试验室,沈阳110136)
(2.沈阳飞机设计研究所 飞行控制部,沈阳110035)
0 引 言
随着人们环保意识的提高,使用电力驱动的小型通用飞机逐渐进入大众的视野,电动飞机能源利用率高、噪音低、无直接环境污染,世界多国纷纷投入大量资源进行电动飞机研制工作。在电动飞机设计研制过程中,气动参数的准确性是保障飞机具有较好飞行性能和飞行品质的前提和基础。由于其搭载乘客,需要的安全系数较高,更应确保气动参数计算的准确性。
目前,飞行器气动力及动导数的获取方法一般有三种:CFD数值模拟仿真计算、风洞试验以及气动参数辨识试验[1]。气动参数辨识试验是根据飞行试验实测数据辨识飞机所需的气动参数、操纵性和稳定性动导数,其得到的参数更接近真实物理特性[2-3]。采用参数辨识方法来确定飞机的气动参数,能够准确、快速地将真实性能和品质特性从试验结果中分离出来[4],不仅缩短了飞行器设计、改型及性能和品质分析的周期,还具有CFD模拟仿真计算或风洞试验不具备的优点。
目前常用的气动参数辨识方法有极大似然法、最小二乘法、遗传算法、卡尔曼滤波等。上述四种参数辨识方法在理论上已相对成熟,但也有其固有的缺陷。在实际飞行中,激励信号是靠飞行员操纵飞机实现的,即激发飞机的飞行模式需要严格的飞行操作,这对飞行员提出了更高要求。如果机动动作不能充分激发,可能需要反复进行飞行试验,增加试验成本。同时,由动力激励法得到的参数往往受到物理意义的限制,在工程上亦会受到很多的限制,实现起来有一定的困难。
因此,国内外进行了许多采用参数辨识方法来确定飞机气动参数的研究。例如,于雪梅等[5]以Y 12飞机飞行试验实测数据为例,建立了飞机起飞性能模型,利用极大似然法对飞机起飞性能参数进行研究;崔平远等[6]结合飞行器的全弹道仿真数据,使用极大似然法研究了闭环飞行状态下传感器的非线性因素对气动参数辨识的影响;P.Lichota等[7]根据飞行数据记录器存储的参数在MATLAB中通过极大似然法对飞机动导数进行识别,研究了初始值对解决方案的影响;简兆圣等[8]建立了某飞机刚体运动的六自由度非线性动力学模型,使用拆分进化算法辨识该型飞机的纵向气动力参数,并与最小二乘法、普通粒子群算法的辨识结果进行对比;宋屹旻[9]针对稳态控制状态下的有控飞行器,采用极大似然估计等统计方法估值姿态信息,利用气动特性的先验知识和有约束最小二乘估值的方法进行气动参数辨识;K.S.Hatamleh等[10]介绍了一种飞行模型参数辨识方法,该方法可以识别出未知的无人机惯性参数;杜昌平等[11]提出一种基于遗传算法的航空器气动参数辨识算法,该算法采用两层实数编码遗传算法嵌套形式,并采用该算法进行某型导弹阻力系数辨识计算;王永骥等[12]为了减小辨识过程中由滤波器参数选择引起的辨识误差,设计了一种参数选择策略并利用最小二乘法对气动参数进行辨识;王锟等[13]为了提高气动参数辨识的准确性,采用遗传算法对导弹气动参数进行辨识;Liu Jiaxi等[14]提出了一种基于纵向动力学模型的参数辨识方法,设计了卡尔曼滤波器进行数据预处理,利用最小二乘法对发动机的动力特性和转速特性进行识别并与试验数据进行对比;G.Chowdhary等[15]采用三种递推参数估计算法对两架飞机实际飞行数据进行气动参数估计,并对比了这三种递推参数估计算法的优劣;李正楠等[16]将卡尔曼滤波融合于极大似然参数估计中,利用极大似然函数渐进一致性、无偏性、收敛性,对气动参数进行辨识并详细叙述了进行气动系数辨识的基本步骤。
上述文献使用物理辨识法对飞机气动参数开展了一系列研究,但目前使用物理辨识模型对飞机气动焦点进行辨识的研究鲜见报道,国内几乎没有;同时电动飞机大多采用大展弦比机翼,飞行中机翼弹性变形较大,风洞试验测试的焦点结果不能较好地反映实际飞行要求。因此,本文结合某型双座电动飞机飞行试验和工程应用,建立基于平飞和盘旋机动的纵向气动参数辨识模型,利用物理解算法进行飞机焦点的参数辨识,以期为飞行器后重心范围的设置起到参考性作用。
1 数学模型建立及分析
1.1 定常直线平飞基本数学模型
飞机作对称定常直线平飞时,作用于其上的力有重力、升力、阻力、螺旋桨拉力[17-19]。由这些力所构成的合力和力矩等于零的条件可以得出如下平衡方程[20-21]:
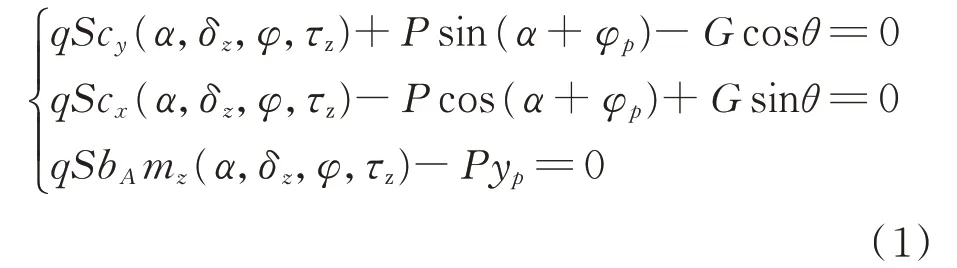
式中:q为飞机速压;α为迎角;δz为升降舵偏角;φ为平尾安装角;τz为升降舵调整片偏角;φp为拉力作用线与水平线的夹角;P为螺旋桨拉力;cy为升力系数;G为飞机重力;cx为阻力系数;θ为航迹倾角;b A平均气动弦长;S为参考面积;y p为发动机推力线偏离飞机重心的距离。
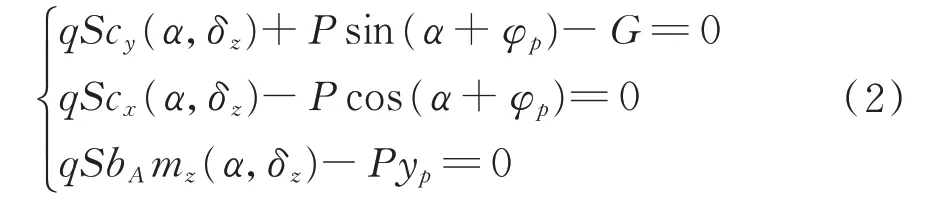
在计算中,通常将影响很小或者不存在的因素略去不计,某型电动飞机的平尾安装角为零,未安装升降舵调整片,故φ和τz不在计算范围内。作为定常直线平飞,其θ=0。故式(1)可以简化为
1.2 定常盘旋机动飞行数学模型
定常盘旋机动飞行中力矩平衡关系为

式中:mz为力矩系数;为俯仰阻尼导数;γ为飞机坡度角;ωz为俯仰角速度。
2 气动焦点参数辨识方法
气动焦点参数辨识分两步:第一步进行飞机平飞配平状态的飞行,在同一速度下得到前后限重心的升降舵偏角;第二步进行固定盘旋飞行,在同一速度下得到盘旋机动前后重心的升降舵偏角。为了保证飞行安全,一方面前后重心的设置应尽量远离临界重心;另一方面增加整机降落伞。气动焦点辨识流程如图1所示。
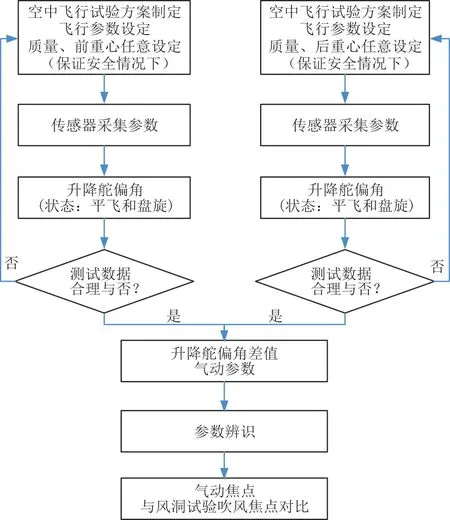
图1 通过飞行试验辨识气动焦点的流程图Fig.1 Flow chart of identification aerodynamic focus through flight test
2.1 平飞配平迭代法
计算过程中,需要进行迭代计算,才能找到合适的配平迎角和舵偏角。风洞试验数据如图2~图4所示。

图2 升力系数随迎角的变化曲线Fig.2 Curve of lift coefficient with attack angle

图4 阻力系数随迎角的变化曲线Fig.4 Curve of drag coefficient with attack angle
第一次进行迭代计算:令P=0,由式(2)的第一式可得cy的第一次近似值为cy=G/qS,据此计算得到cy。根据cy找到对应的α和δz(如图2所示),根据α和δz用插值法查得mz=0(如图3所示)和cx值,再按式(2)中的第二式,求得对应的P=qScx/cos(α+φp)。

图3 力矩系数随迎角的变化曲线Fig.3 Curve of moment coefficient with attack angle
第二次计算,由上述的计算结果需用拉力P,根据式(2)的第一式,根据上述步骤,再次进行迭代计算。
对于一般工程计算,经过迭代两次的步骤可以得出满意的解。
2.2 盘旋解析法
在气动力特性的线性范围内,采用解析法研究定常盘旋的机动飞行。

联立式(6)~式(8)求解以上方程,并且考虑到飞机的相对密度μ=2m/ρSb A,得到:

3 参数辨识应用
以某型大展弦比双座电动飞机为例,其参数如表1所示。电动飞机在空中飞行时,由于消耗能量为电能,在飞行过程中,重心的位置未发生改变,无需修正重心位置,有利于气动焦点参数辨识。

表1 某型电动飞机主要参数[22]T able 1 Main parameters of an electric aircraft[22]
在进行气动焦点参数辨识飞行试验前,要选定飞机需要的构型,然后实际测量其质量,称重前保证飞机为飞行试验前的技术状态,测量所用的仪器和设备,应在检定合格的有效期内,并有合格标识,称重的精度不低于±0.1%,被称质量的范围应在称的最大量程的2/3左右。
对机载数据采集系统(采集频率50 Hz)、飞参记录仪、地面数据处理系统(GDAS)以及地面监视系统进行联调,保证各个记录设备的协调和正常工作。
基于通用电动飞机的飞行构型状态,在飞行试验前,不管重心前限还是重心后限,为确保获取的试验数据准确、可靠,要求飞机在平稳大气环境中飞行,整个飞行试验采用同一质量528 kg,始终保持同样的速度V,对飞机的飞行状态,操纵要求为:
(1)选定飞机的重心前限位置29.88%MAC,飞机平飞速度为V,测量飞机升降舵偏角度δ1;
(2)保持初选的飞机重心前限位置29.88%MAC以及设定的飞机平飞速度V不变,设定飞机的盘旋坡度角为γ(γ的范围为30°~60°),测量飞机升降舵偏角度δ2;
(3)选定飞机的重心后限位置37.44%MAC,飞机保持平飞速度为V,测量飞机升降舵偏角度δ3;
(4)保持飞机重心后限位置37.44%MAC不变以及设定的飞机平飞速度V不变,飞机的盘旋坡度角为γ,与要求(2)的坡度角一致,测量飞机升降舵偏角度δ4。
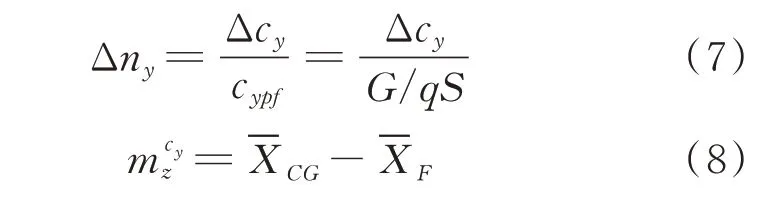
按照上述要求获取的试验数据,由式(9)可以得到式(10)和式(11),式(10)除以式(11),得到式(12),通过物理解算的方式获得飞机焦点:
式中:Δδz1、Δδz2为升降舵偏差值,Δδz1=δ1-δ2,Δδz2=δ3-δ4。
通过模型的多次迭代,减少了中间环节变量,对参数辨识的结果更有利。俯仰阻尼导数的准确度对辨识结果影响较大,本文计算时俯仰阻尼导数是通过飞行试验采取最大似然法得到的。需要注意的是,通常俯仰阻尼导数辨识需要专门的试验设计,否则辨识结果精度偏低,在工程中可以采用工程估算值。
4 飞行试验辨识结果与风洞试验结果对比
为了确定飞机焦点位置进行多次飞行试验,将其中一组有效数据作为算例,结合上述计算方法,得到实际飞行的气动焦点位置。最终结果取多次辨识结果的平均值。
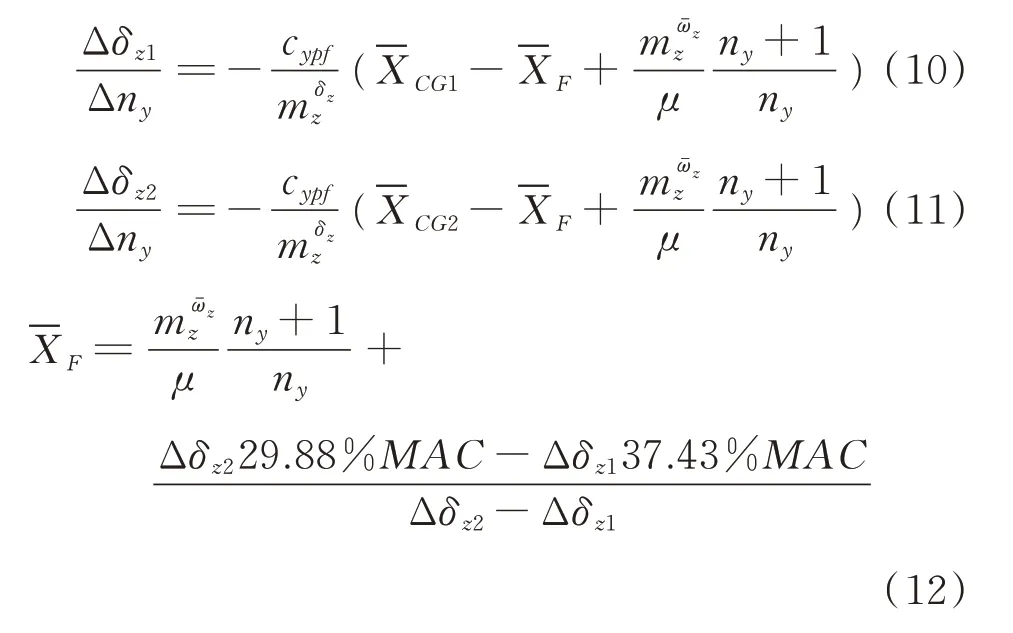
其中一组有效试验数据如图5~图8所示。

图5 重心前限平飞飞行Fig.5 Ahead of gravity center flight
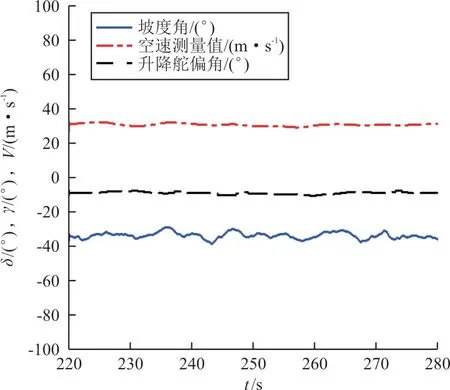
图6 重心前限盘旋机动飞行Fig.6 Limited circle maneuver ahead of gravity center
图7 重心后限平飞飞行Fig.7 Back limit of gravity center flight
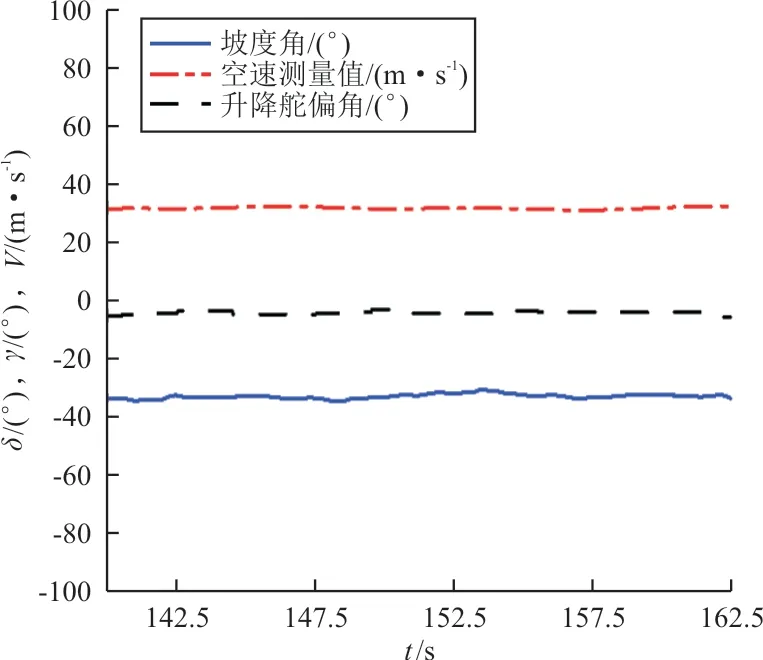
图8 重心后限盘旋机动飞行Fig.8 Circle maneuver back limit of gravity center
通用电动飞机风洞试验模型基本上属于刚体,在风洞试验过程中,风洞试验速压较小,整个模型在风洞试验过程中变形量较小,故测试的数据属于理想状态数据。但在实际飞行中,某型电动飞机由全复合材料制造,且为大展弦比气动布局,飞行过程中,弹性变形较大,其气动数据不能完全按照风洞试验的数据执行,通过本文气动焦点辨识,实际的焦点位置比风洞试验数据靠前4.5%MAC,如表2所示。
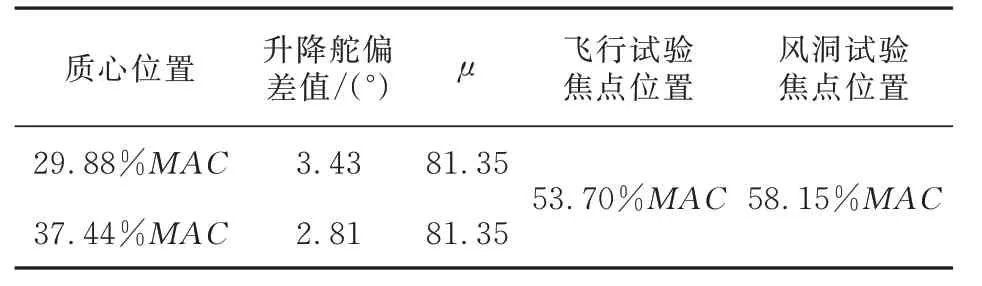
表2 飞行试验焦点与风洞试验焦点对比Table 2 Comparison of flight test focus and wind tunnel test foucs
5 结 论
(1)对于展弦比较大且采用了大量复合材料的电动飞机而言,在飞行过程中的实际焦点位置与风洞试验结果有一定差距。
(2)本文采用物理解算法辨识得到的焦点位置更接近于实际状态,并且利用该物理解算方法参数辨识飞机气动焦点所需参数个数较少,易于实现。此方法辨识的气动焦点为通用飞机,特别是对于大展弦比弹性变量较大的飞机来说更有价值,为飞机的重心后限布置奠定了良好的基础。