临近空间高超声速目标滑跃式轨迹Sine-AIMM跟踪算法
2021-06-25王国宏张翔宇于洪波薄钧天
李 林,王国宏,张翔宇,于洪波,薄钧天
(海军航空大学信息融合研究所,烟台 264001)
0 引 言
近年来,随着临近空间高超声速飞行器技术的日益成熟,以美、俄为首的世界大国正在全面推进高超声速飞行器的发展,新旧项目交替推进,总体状态呈井喷式发展。临近空间高超声速飞行器以其高速、高机动的特性,无论是在攻防对抗,还是在战略博弈中都有着与常规飞行器不同的独特优势,对我国的防御体系和空天安全形成了严重挑战[1-3]。因此,研究如何有效探测跟踪临近空间高超声速目标对我国的国防安全有着重要意义。
滑跃式轨迹作为临近空间高超声速飞行器的一种主要飞行轨迹,利用助推-滑翔状态的反复切换,使得滑跃式机动目标具有低能耗、远距离、强突防的巨大优势,已成为高超声速飞行器进入临近空间进行巡航的常用方式[4-5]。
临近空间高超声速滑跃式目标的跟踪问题属于机动目标跟踪的范畴,但又比一般常规机动目标的跟踪问题更为复杂,根据滑跃式轨迹的特性,跟踪常规机动目标时所采用的Singer模型[6]、当前统计模型[7]、Jerk模型[8]等已很难与滑跃式目标轨迹准确匹配。因此,文献[9]在对周期性滑跃式轨迹特性分析的基础上,提出了一种将目标加速度建模为具有正弦波自相关随机过程的Sine模型,实现了对滑跃式运动目标有效跟踪;随后,文献[10]和文献[11]分别在Sine模型的基础上进行了进一步的研究和拓展,完善了利用Sine模型对滑跃式运动目标进行跟踪的算法体系,均取得了较好的匹配跟踪效果。
但是对于临近空间高超声速滑跃式机动目标的跟踪问题而言,最大的挑战来自目标运动模式的不确定性,其轨迹往往并非为理想的周期性滑跃式轨迹,因此单一跟踪模型很难与目标轨迹准确匹配实现精确跟踪,一旦先验选择的模型与目标的真实运动失配,将导致目标跟踪精度下降,甚至出现目标丢失的现象[12-13]。
目前,对机动目标进行跟踪的方法中最有效的方法为交互多模型算法[14-15],(Interactive Multiple Model,IMM)算法通过多个模型之间的交互来对目标进行跟踪,相对于单模型而言,对目标的机动具有更强的适应性[16]。但通过分析可以发现,现有的IMM算法存在模型集与临近空间高超声速目标滑跃式轨迹匹配度不高,模型转移概率矩阵固定等问题,使得算法对目标状态的估计精度不高,跟踪效果不佳[17-19]。
针对上述问题,本文在文献[9]所提Sine模型的基础上,提出一种基于多重贝叶斯准则的自适应交互式Sine模型(Adaptive Interactive Multiple Sine Model,Sine-AIMM)临近空间高超声速滑跃式目标跟踪算法。算法在确定滑跃式目标机动角速率变化区间的前提下,选取多个机动角速率不同的Sine模型对滑跃式轨迹进行匹配,并利用多重贝叶斯准则在线调整各模型权重和模型转移概率矩阵,实现对临近空间高超声速滑跃式目标轨迹的有效匹配跟踪。
文章接下来的内容安排如下:第1节对临近空间高超声速目标滑跃式轨迹进行介绍;第2节对本文所采用的跟踪算法原理进行阐述;第3节根据仿真结果对算法性能进行分析;第4节得出本文结论。
1 滑跃式目标运动特性分析
对于临近空间高超声速滑跃式运动目标,以上推段和滑翔段的检测跟踪最为重要,而对于目标最终的制导阶段,由于该阶段时间短、距离近、目标机动复杂,因此本文主要针对动力上推段和无动力滑翔段轨迹进行分析和跟踪。
假设地球为均匀球体,在不考虑地球自转、大气扰动的情况下,参考文献[20-21],临近空间高超声速滑跃式目标运动方程可以表示为:
(1)
式中:r表示目标与地心之间的距离;θ和φ分别表示目标的经度和纬度;γ、ψ和σ分别表示航迹倾角、航迹方位角和滚转角;v表示目标运动速度;F表示发动机推力;α表示攻角;g表示重力加速度;m表示目标质量;L和D分别表示空气升力和空气阻力。
由式(1)可知,目标在空间中的运动是发动机推力、空气动力和自身重力作用效果的累加,其中空气动力又可分为空气升力L和空气阻力D,其计算公式为:
(2)
式中:ρ表示大气密度;S表示目标参考面积;CL和CD分别表示升力系数和阻力系数;CL和CD通常为攻角α和速度v的函数。
对式(1)所表示的临近空间高超声速目标的滑跃式轨迹进行进一步细分,又可分为动力上推阶段和无动力滑翔阶段两个主要运动状态。在动力上推阶段,认为目标不发生滚转,即σ=0,且由于燃料消耗,上推阶段目标质量随时间不断变化,因此上推阶段需要在式(1)的基础上补充一个质量方程:
(3)
式中:I表示发动机比冲。
对于无动力滑翔阶段,此时发动机停止工作,发动机推力F=0,同时目标质量也不再发生变化,目标依靠自身重力和空气动力进行纵向运动并通过自身的滚转来实现横向机动。
2 Sine-AIMM算法原理
根据临近空间高超声速滑跃式目标运动特性,本文提出一种以Sine模型为主体,利用多重贝叶斯准则的Sine-AIMM模型机动目标跟踪算法,以实现对高超声速滑跃式目标的匹配跟踪处理,算法的具体流程如图1所示。

图1 Sine-AIMM算法处理流程Fig.1 Sine-AIMM algorithm processing flow
2.1 Sine模型
目前,Sine模型作为临近空间高超声速目标一种常用的跟踪模型,在临近空间高超声速滑跃式机动目标的跟踪上具有较好的跟踪效果。与常用的将目标加速度建模为指数自相关零均值随机过程的Singer模型不同,Sine模型将目标加速度建模为与滑跃式目标运动特性更加匹配的正弦波自相关零均值随机过程,其自相关时间函数Rr可表示为:
(4)

对于由目标x轴位置、速度、加速度和第二加速度所构成的状态向量X:
(5)
可得目标状态方程为:
X(k+1)=F(T,ω0)X(k)+W(k)
(6)
式中:X(k)表示k时刻的状态向量,F(T,ω0)表示状态转移矩阵,满足:
F(T,ω0)=
(7)
W(k)表示过程噪声序列,其对应的过程噪声协方差阵Q(k)满足:
(8)
式中:
(9)
目标量测方程可表示为:
Z(k)=H(k)X(k)+V(k)
(10)
式中:Z(k)表示无偏转换后的量测数据,H(k)表示量测矩阵,满足:
H(k)=[1, 0, 0, 0]
(11)
V(k)表示量测噪声序列,其对应的量测噪声协方差R(k)可以表示为:
(12)
式中:ρ,φ,ε分别表示目标的斜距、方位角和俯仰角;σρ表示测距误差;σφ表示方位角误差;σε表示俯仰角误差,且:
A=

(13)
2.2 自适应交互多Sine模型
假设临近空间高超声速目标进行滑跃式运动时其转弯角速度的机动范围为[ωmin,ωmax],选定3个Sine模型进行交互,若3个Sine模型的角速度参数集合为W=[ω1,ω2,ω3]T,行则设定初始时刻参数集合W0=[ωmin,0.5(ωmin+ωmax),ωmax]T。
根据设计的3个Sine模型,搭建与之匹配的3条目标跟踪通道,并将不同跟踪通道构建为可实时跳变的闭合回路。
1) 利用贝叶斯准则,对后验模型切换权重进行更新,将当前时刻模型i→j的后验模型切换权重构建为前一时刻先验模型切换权重和模型权重的函数。
若k-1时刻模型i的权重为μi(k-1),k-1时刻模型i→j的先验模型切换权重为P[Wj(k)|Wi(k-1)],则k时刻模型i→j的先验模型切换权重P[Wi(k-1)|Wj(k)]可表示为:
P[Wi(k-1)|Wj(k)]=
(14)
其中:i=1,2,3且j=1,2,3。
2)将当前时刻各通道的输入构建为前一时刻各通道的输出和当前时刻后验模型切换权重的函数。

(15)
其中:i=1,2,3。

(1)在滤波过程中,对模型似然进行更新,将当前时刻模型似然构建为雷达截获信息的函数。

(16)
其中:i=1,2,3。
(2)利用贝叶斯准则,对模型权重进行更新,将当前时刻各模型的权重构建为当前时刻模型似然、前一时刻先验模型切换权重和前一时刻模型权重的函数。
k时刻模型i的权重μi(k)可表示为:
(17)
其中:i=1,2,3。
(3)利用贝叶斯准则,对先验模型切换权重进行更新,将当前时刻模型i→j的先验模型切换权重构建为当前时刻模型似然、前一时刻先验模型切换权重和前一时刻模型权重的函数。
k时刻模型i→j的先验模型切换权重P[Wj(k+1)|Wi(k)]可表示为:
(18)
其中:i=1,2,3且j=1,2,3。
综上所述,本文所提Sine-AIMM算法的实现主要包括以下几个步骤
1)在对高超声速滑跃式运动目标跟踪前,利用Sine模型结合目标机动角速度的变化范围设计多个跟踪通道,以匹配目标所有可能的运动形式;
2)对于各跟踪通道,利用后验模型切换权重和各时刻的输入、输出函数,将其设计为可实时跳变的闭合回路;
3)利用第一重贝叶斯准则,将不同通道后验模型切换权重的更新方式设计为模型权重和先验模型切换权重的函数;
4)利用第二重贝叶斯准则,将不同通道模型权重的更新方式设计为模型似然,先验模型切换权重和模型权重的函数;
5)利用第三重贝叶斯准则,将不同通道先验模型切换权重的更新方式设计为模型似然,先验模型切换权重和模型权重的函数;
6)利用各通道的滤波跟踪算法,将不同通道模型似然的更新方式设计为雷达截获信息的函数。
2.3 算法稳定性分析
为进一步分析算法在滤波过程中的稳定性,下面将根据文献[7],结合卡尔曼滤波对算法模型状态更新的系统误差进行分析。
根据卡尔曼滤波算法,对于连续时间、目标的状态估计为:


(19)

设初始状态为零,对式(19)两边进行拉普拉斯变换可得:

(20)

(21)
根据目标量测方程Z(t)=HX(t)+V(t),可将式(21)进一步整理得:
(sI-F+KH)-1V(s)
(22)

KH)-1KH]X(s)+(sI-F+KH)-1V(s)
(23)

对于Sine模型,其系统状态矩阵为:
(24)

(25)
式中:
det(sI-F+KH)=s4+k1s3+(k2+ω2)s2+
(k1ω2+k3)s+k2ω2+k4
(26)
B=s4+k1s3+(ω2+k2)s2+(k1ω2+k3)s+k2ω2
(27)

(28)
(29)
(30)
(31)
由式(28)~(31)可以看出,若使用单一的Sine模型对目标进行跟踪滤波,目标状态估计的收敛性存在风险,想要实现Sine模型对目标的稳定跟踪,需要对模型参数进行合理控制以限制动态误差的稳态值。而本文所提Sine-AIMM算法利用多个不同参数的Sine模型进行交互,并根据滤波过程适时调整各模型权重和模型转移概率矩阵,可以实现模型参数的自适应调整以匹配目标轨迹参数,限制动态误差的稳态值,实现稳定有效跟踪。
3 仿真与分析
3.1 仿真参数设置
假设临近空间高超声速飞行器依据式(1)~(3),在发动机推力、空气动力和自身重力的共同作用下,在三维空间内进行滑跃式运动,其初始运动参数见表1。

表1 目标初始运动参数Table 1 Target initial motion parameters
相应的,观测雷达的相关参数见表2。

表2 雷达仿真参数Table 2 Radar simulation parameters
设定目标转弯角速度的机动范围为[0.02, 0.2] rad/s,Sine模型集初始权重U(0)=[1/3,1/3,1/3]T,初始Markov模型概率转移矩阵为:
(32)
在上述仿真条件下,进行Monte-Carlo仿真实验,对本文所提算法的跟踪性能进行仿真验证。本文所有仿真均是在Intel Core I7-6700,3.4 GHz,8 GB RAM,Matlab R2014a环境下完成的。
3.2 仿真结果与分析
实验1为对本文所提Sine-AIMM算法跟踪临近空间高超声速滑跃式目标的性能进行验证和分析,在上述初始条件下,通过表3方式控制发动机工作时间,可得到如图2所示的目标滑跃式运动轨迹。

表3 飞行器轨迹控制参数Table 3 Aircraft trajectory control parameters
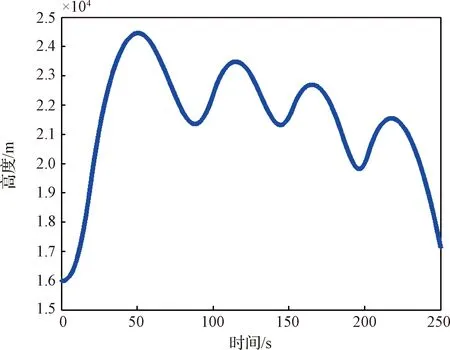
图2 目标滑跃式运动轨迹Fig.2 Target slippage leap trajectory
为验证本文所提算法较单模型算法和现有IMM算法在跟踪性能上的优越性,同时利用下面4种算法对图2所示滑跃式轨迹进行跟踪,200次Monte-Carlo仿真实验后,其仿真结果如图3和图4所示。其中,模型1为本文所提Sine-AIMM算法,模型2为文献[9]中基于Sine的单模型算法,模型3为文献[11]中基于ANM-SW的单模型算法,模型4为文献[17]中基于CA-CV-Sine的IMM-QB算法。

图3 位置估计误差Fig.3 Position estimation error

图4 速度估计误差Fig.4 Velocity estimation error
通过对仿真结果的分析可知:1)本文所提算法较模型2、模型3和模型4算法具有较小的位置和速度估计误差,跟踪精度较高;2)就目标跟踪的稳定性而言,本文所提算法的位置和速度误差曲线较另外三种算法更为平稳,对临近空间高超声速目标的非周期滑跃式轨迹具有更好的适应性。为对本文所提算法的优越性进行更为直观的展示,下面对目标的位置和速度估计误差求统计平均进行定量分析,具体见表4。

表4 目标跟踪误差统计平均Table 4 Statistical average of target tracking error
通过表4对平均估计误差的定量分析可知,就模型2和模型3算法而言,模型3算法是在模型2算法基础上的改进,其位置和速度跟踪精度较模型2算法更优;对于模型4算法而言,模型2与模型3算法的平均位置跟踪精度优于模型4算法,而模型4算法的平均速度跟踪精度则优于模型2和模型3算法,但本文所提Sine-AIMM算法无论是在位置跟踪精度还是在速度跟踪精度上均优于以上三种算法。
实验2为对本文所提算法跟踪性能进行进一步验证,通过调整目标发动机工作时间对目标滑跃式轨迹进行调整,得到如图5所示的目标滑跃式运动轨迹,并针对该轨迹利用上述4种跟踪算法进行跟踪,200次Monte-Carlo仿真实验后,仿真结果如图6、图7和表5所示。
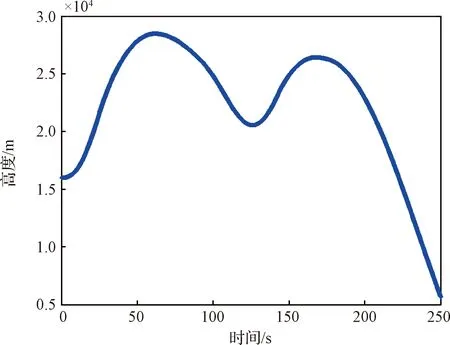
图5 目标滑跃式运动轨迹2Fig.5 Target slippage leap trajectory 2

图6 轨迹2位置估计误差Fig.6 Position estimation error of trajectory 2

图7 轨迹2速度估计误差Fig.7 Velocity estimation error of trajectory 2

表5 轨迹2跟踪误差统计平均Table 5 Statistical average of target tracking error of trajectory 2
通过对上述仿真结果的分析可知,本文所提算法对调整后的轨迹仍能实现有效跟踪且跟踪性能优于模型2、模型3和模型4算法。但同时通过将实验1与实验2的仿真结果对比可知,随着目标滑跃次数的减少,本文所提算法较模型2、模型3和模型4算法性能的提升也随之降低,这主要是由于目标轨迹的机动复杂度降低,使得基于Sine和ANM-SW的单模型算法以及IMM-QB算法对目标轨迹的失配度降低,跟踪性能有所提升,但是这也正说明了本文所提Sine-AIMM算法对临近空间高超声速目标滑跃式轨迹具有较好的匹配性。
通过上述分析可以发现,本文所提Sine-AIMM算法可以较好的匹配临近空间高超声速目标滑跃式轨迹,实现对临近空间高超声速滑跃式目标的有效稳定跟踪,且与单模型算法和现有IMM算法相比,本文所提算法跟踪性能更优。
4 结 论
本文研究了临近空间高超声速目标滑跃式轨迹的跟踪问题,针对单模型算法匹配度不高,现有IMM算法模型选择和交互方式不合理的问题,结合Sine模型和IMM思想,提出了一种基于多重贝叶斯准则的临近空间高超声速目标滑跃式轨迹Sine-AIMM跟踪算法。仿真结果表明,本文所提算法对非周期滑跃式轨迹具有较好的适应性,能够实现对临近空间高超声速滑跃式运动目标的有效稳定跟踪,与单Sine模型算法和IMM算法相比跟踪性能更优。
