面向在轨服务的舱段间机电连接接口研究
2021-06-22孙涛李娟李伟达
孙涛,李娟,李伟达
(苏州大学 机电工程学院,江苏 苏州 215000)
0 引言
大型复杂的航天器具有较高的经济和社会应用价值,但其成本昂贵、使用价值高,一旦在轨发生故障,损失巨大[1]。而在轨服务技术缓解了这一个困境,不但可以增强航天器在轨自主能力,延长在轨寿命,而且可以保持航天器所执行任务的可持续性。
连接接口作为航天器连接的重要部件,可以保证航天器之间快速、可靠地连接与分离。随着航天技术迅猛发展,在轨服务任务也趋向于复杂化,其对连接接口的功能和性能要求也逐渐提高。如日本研制的工程试验卫星(ETS-VII)完成了与空间站自主对接并补给有效载荷的飞行任务,采用抓手-碰锁式连接接口,主动部分安装有抓手,被动部分安装把柄[2];国防科技大学完成了一种反对称异体同构中心式对接接口的设计,主、被动部分上同时安装捕获枪及容纳孔[3];Michigan空间公司开发了类杆锥式连接接口ARD、ASDS、AMDS[4]以及SPHERES项目的小型异体同构式连接接口[5]。
为了满足舱段对接与更换的在轨服务任务需求,本文对一种合作卫星舱段间的机电连接接口进行了研究。
1 方案设计
合作卫星舱段间对接与更换在轨任务顺利执行,需要连接接口具备快速连接与分离的能力。首先,连接接口应具备捕获、调姿、定位、紧固等功能。另外,还应具备电气连接功能,来实现信号与数据的传输。
图1为新型机电连接接口,分为主动部分与被动部分,分别装在主动舱段与被动舱段上。机电连接接口主要包括4个模块:捕获模块(用于对被动舱段的抓捕),其基本构形为新型类锥杆式对接接口[6];精对准模块(用于舱段对接过程的调姿及定位),其主要为销孔-锥面配合定位方式;电动螺钉紧固模块(用于舱段对接完成后的紧固),其主要为螺纹连接紧固方式;浮动电气连接接口模块(用于电气接口的连接),其连接方式为螺纹传动方式。每个单模块同样分为主动部分与被动部分,分别装在主动舱段与被动舱段上。
对接的策略如下:在视觉与测距系统的作用下,辅助机械臂将被动舱段捕获并使它满足捕获容差,中心杆球头伸入接受腔里与捕获锁碰撞后实现捕获锁紧,中心杆完成对被动舱段的捕获动作。中心杆球头缩回拉近被动舱段,在精对准模块的作用下,逐步实现两舱段间姿态偏差的减小并完成精定位;然后,电动螺钉紧固模块动作实现对被动舱段的锁紧,两舱段在机械上完成连接与力封闭;最后,浮动电气连接接口模块动作,实现电气接口的连接。分离过程为上述动作的逆过程,具体而言,就是切断电气连接—螺钉解锁—中心杆伸出、球头解锁这一系列动作[7]。
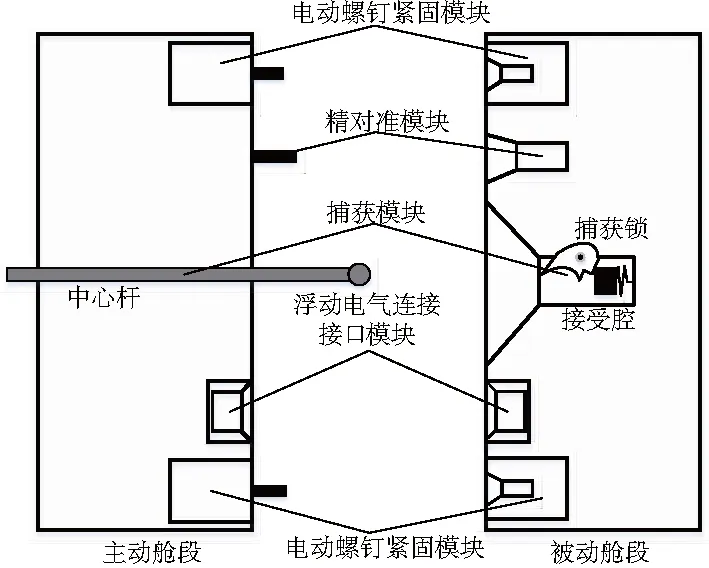
图1 机电连接接口总体方案图
2 连接接口容差及指标
容差是指主动舱段能够对被动舱段进行成功捕获的合理工作范围,对于连接接口,应当满足舱段对接与更换任务中需求的容差指标:径向位置偏差≮±40mm;角度偏差≮±2°。本文中的容差主要分为位置偏差和角度偏差,容差设计是受几何外形尺寸直接影响的。如图2所示,若x轴为接口主动对接方向,被动舱段坐标系相对于主动舱段坐标系分别沿Ox、Oy、Oz轴位置偏差为dx、dy、dz,被动舱段坐标系绕Ox、Oy、Oz轴转过的角度偏差分别为dθx、dθy、dθz。其中,轴向位置偏差:0≤dx≤l;径向位置偏差:dy=dz=(D-d)/2;自旋方向角度偏差:dθx=[(k-m)/a]×(180°/π);俯仰、偏航方向角度偏差:dθy=dθz=min[arctan(2h/D),arcsin(l/2L)]。
图2中l为两舱段端面初始对接距离;L为舱段外接圆的半径;d为球头直径;D为接受腔锥底直径;h为接受腔锥体高度;a为精对准柱销分布圆周半径;m为精对准柱销球头直径;k为精对准销孔锥底直径。
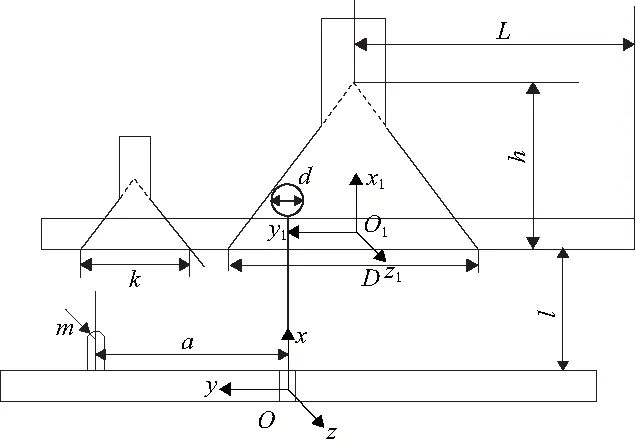
图2 机构容差描述
3 捕获过程动力学仿真
3.1 仿真模型建立
本文捕获过程动力学仿真的目的:用于验证机构具有一定的捕获及容差能力,能够满足容差指标要求,以此证明机构设计的合理性。
首先,假设主动舱段、被动舱段、中心杆及球头、接受腔的小变形可以忽略,且都为刚体;将主、被动舱段简化为结构简单的立方体结构;将捕获模块的主动部分简化为中心杆和球头,将捕获模块主动部分的直线伸缩运动等效为中心杆与主动舱段之间的直线运动。最后,将捕获模块中的抓捕机构简化为捕获滑块,捕获滑块通过弹簧与接受腔末端连接,可以沿接受腔末端轴向运动,中心杆球头通过撞击滑块实现捕获[8]。
建立符合表1 参数的简化后的几何模型并导入Adams软件做动力学仿真分析。导入的模型是无材料特性、无质量、无约束关系的,如图3所示。首先对模型各零部件添加材料,本接口绝大部分选取铝合金材料,中心杆和球头选取不锈钢材料,质量参数如表2所示。其次,对模型各零部件之间添加约束关系,将中心杆与主动舱段之间添加移动副,捕获滑块与接受腔之间添加移动副,并在捕获滑块末端与被动舱段端面之间添加弹簧阻尼器,将中心杆球头与接受腔、捕获滑块之间添加接触力。
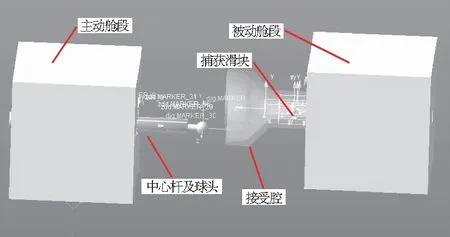
图3 捕获过程仿真示意图
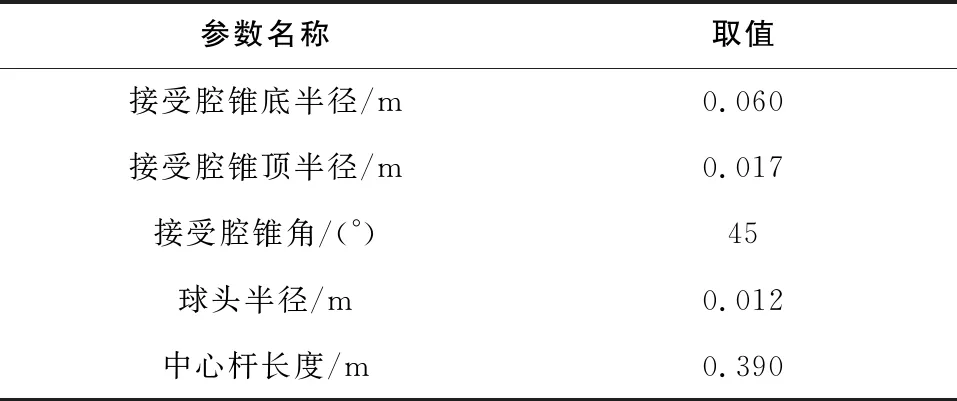
表1 中心杆与接受腔几何参数
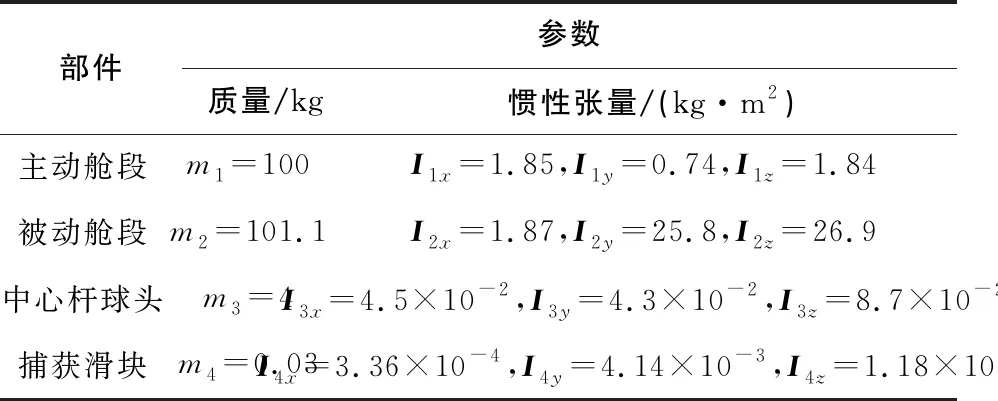
表2 对接系统的质量参数
3.2 工况及分析方法
理想的对接状态是两舱段间保持相对静止状态且无相对角度和位置偏差。由于本文中的捕获过程为被动舱段已被辅助机械臂事先控制并送到对接的停靠区域后再由捕获模块对其进行二次捕获的过程,所以在本文中不考虑轴向位置偏差dx,假设dx始终为150mm;因为仿真研究重点为捕获碰撞过程,不涉及精对准模块的位姿校正,所以自旋方向的角度偏差dθx也可不考虑。在理想对接状态下,定义两舱段间无轴向对接初速度,控制中心杆伸出速度为5mm/s的工况为标准工况[11]。根据容差指标要求,在标准工况的基础下分别给出了6种工况进行仿真,分析接口的捕获及容差能力,仿真工况如表3。
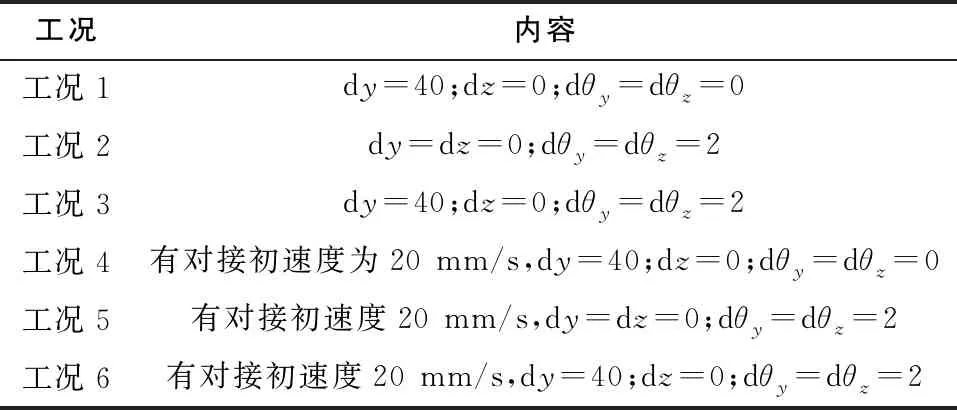
表3 仿真工况
判断主动舱段能够捕获成功的标准是:中心杆球头沿接受腔内壁滑入捕获区域且撞击捕获滑块,捕获滑块的位移达到5mm后中心杆球头被锁紧,捕获成功。在仿真软件中给捕获滑块添加传感器[12],用来监测捕获滑块受到撞击后的位移,位移达到5mm后即刻让仿真停止。
3.3 仿真结果分析
图4为不同工况下仿真结果曲线变化图。综合分析图4可得,对于全部工况,被动舱段都能够被成功地捕获。从图4(a)可以看出,随着中心杆的伸出,捕获距离在持续下降,但由于对接初速度的不同导致曲线下降速率也不同,相应捕获时间也不同。其中,对于工况1-工况3在球头未与接受腔发生接触碰撞之前曲线下降的速率是一样的,但在接触碰撞之后由于不同偏差的存在,曲线下降的速率发生变化;从3条曲线对比来看,在接触碰撞之后工况1与工况3的曲线几乎重合,工况2与工况3的曲线相比而言差别较大,说明位置偏差对捕获的影响比角度偏差的影响大。对于工况4-工况6亦是如此,但由于对接初速度的存在,工况4-工况6曲线下降的速率比工况1-工况3曲线下降的速率要快;从3条曲线对比来看,同样可以说明位置偏差对捕获距离的影响比角度偏差的影响程度大。
从图4(b)可以看出,对于全部的工况,中心杆球头都能撞击捕获滑块并使其位移达到5mm,此时中心杆球头被锁紧,捕获成功。其中,对于无对接初速度时的工况1及工况3,由于中心杆球头与接受腔之间碰撞使得捕获滑块产生了振动和冲击,但滑块振幅相对较小;对于有对接初速度时的工况4及工况6,对捕获滑块产生了更大的振动和冲击,滑块振幅相对较大。虽然主、被动舱段之间加大对接初速度会大大缩短捕获时间,但这同时也给被动舱段造成了更多的振动与冲击。
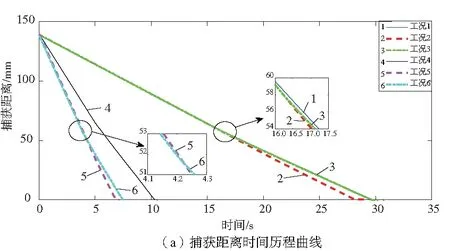
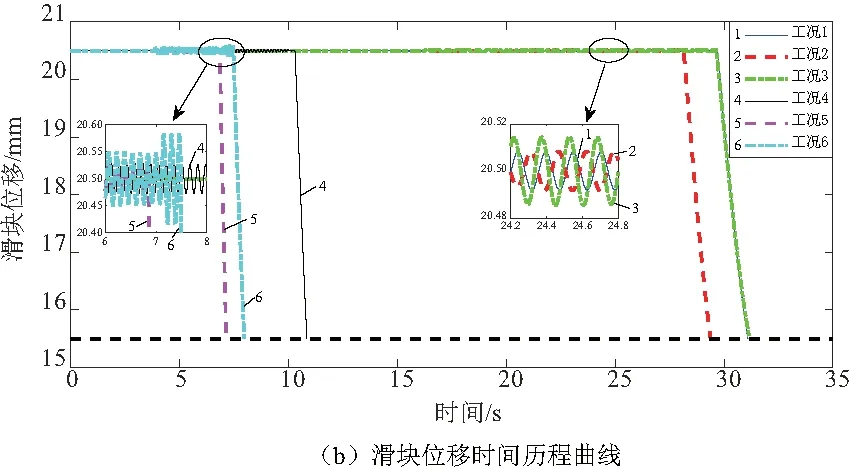
图4 不同工况下仿真结果曲线变化图
图5(a)所示为仅存在位置偏差的对接工况下的容差范围,位置容差最大可以达到53mm。图5(b)所示为仅存在角度偏差的对接工况下的容差范围,角度容差最大可以达到11°。如图5(c)所示,对接状态不可能只存在单一偏差,若同时存在综合偏差时容差的范围分析比较困难,所以只考虑了在接受腔轴截面内的容差范围。综合分析可以得出:此种对接状态下,在位置容差为±50mm、角度容差为±7°的容差范围内可以确保被动舱段被成功捕获。
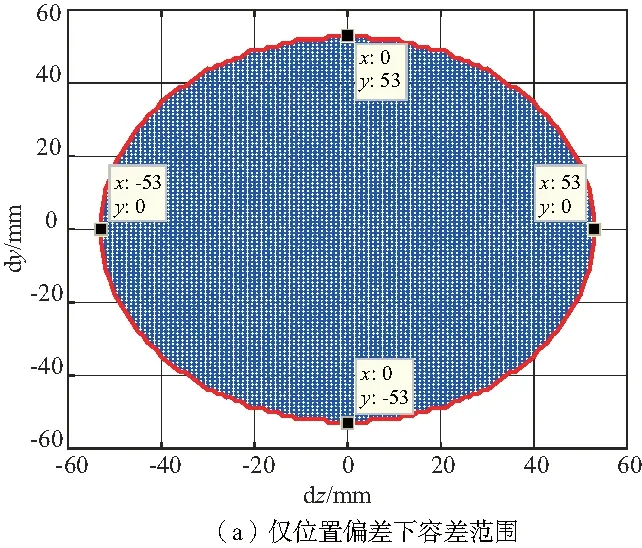
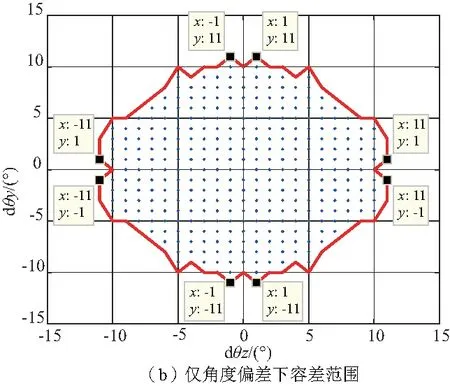
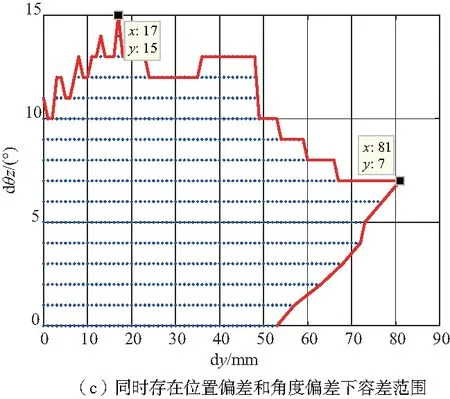
图5 接口容差范围仿真结果
4 结语
针对合作卫星舱段间的对接与更换任务,介绍了一种新型机电连接接口。根据容差指标要求给出了连接接口方案设计,通过动力学仿真分析得到了位置容差±50mm、角度容差±7°的容差范围,验证了连接接口具有一定的捕获及容差能力且满足容差指标要求。
