工业机器人半实物虚拟仿真系统设计
2021-06-17杜志强李凯宋中越邵帅李文欣韦泽坤
杜志强,李凯,宋中越,邵帅,李文欣,韦泽坤
(天津中德应用技术大学,天津,300000)
0 引言
《中国制造2025》战略规划借鉴了德国“工业4.0”,以“智能制造”为主攻方向,为我国发展成现代化工业强国描绘了清晰的路线[1]。工业自动化是推动工业4.0的重要前提之一,也是必要因素,而工业自动化主要体现在机械制造和电气工程领域,导致众多机械和电气相关厂商纷纷开展了智能制造方面的研究。
目前全球众多优秀制造企业都开展了数字化工厂建设的实践。FANUC公司实现了机器人和伺服电机生产过程的高度自动化和智能化;施耐德电气实现了电气开关制造和包装过程的全自动化。国内也涌现出海尔、美的、东莞劲胜、尚品宅配等智能工厂建设的样板,如海尔佛山滚筒洗衣机工厂、尚品宅配实现了从款式设计到构造尺寸的全方位个性定制等。
但目前数字化工厂仍存在较多缺点[2]:(1)盲目购买自动化设备和自动化产线。认为推进智能工厂就是自动化和机器人化;(2)尚未实现设备数据的自动采集和车间联网,导致依然存在大量信息化孤岛和自动化孤岛;(3)尚未具备快速建厂的技术条件,使得工厂建设过程周期漫长。
究其原因,数字化制造工厂系统复杂,工厂的完善仍需要较长时间。而目前数字化工厂所存在的共性缺陷中、不能快速建厂是其最致命的缺陷,这是数字化工厂高度智能化导致工厂建设漫长与产品为抢占市场需要缩短上市周期之间的矛盾。缩短智能工厂开发周期对提高产品市场占有率具有重要意义。
1 半实物虚拟仿真系统整体设计
目前,市场上已有的工业机器人由于应用场景的不同,种类很多,其特点也是各有千秋。本文拟设计一种基于工业机器人的半实物虚拟仿真系统,通过对市场同类产品的特点分析,在系统控制方面进行了优化设计;在末端夹具方面创新设计了一种通用型多功能抓手[3];在软件仿真和测试环节,该研究采用了Visual C++、CAD和DH模型进行开发。其中DH模型作为工业机器人运动仿真分析的支撑平台,Visual C++和CAD主要用于设计工业机器人的机械臂改进和布局分析。
目前项目已经具备了数字化工厂虚拟互联调试的基础技术,已经可以通过仿真环境下物理的PLC[4]、HMI等自动化设备的结合,完成对PLC程序和机器人程序的联合调试,在施工前即可实现设计和程序的提前验证,具有了虚拟互联调试的基本框架系统。在系统仿真联调方面,本文着重探讨工业机器人机械臂的改进和与实际工厂相同的虚拟孪生系统的呈现。
2 虚拟仿真系统硬件设计
(1)工业机器人系统设计
研究所涉及的工业机器人系统由机器人本体、电气控制系统和能源驱动系统三个基本部分组成[5]。其中机器人本体在工业机器人系统中发挥着关键作用,一般由机器人底座、腰座、大臂、小臂、手腕、末端执行器和驱动系统组成;能源驱动系统为整个机器人本体提供工作动力;末端执行器可根据实际的工作需要,增加各类夹持器(夹手、夹具)或焊枪等设备,以便适用于相应实际作业环境。
工业机器人系统结构如图1所示。
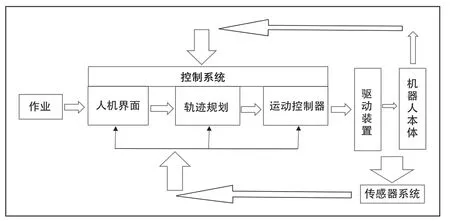
图1 工业机器人系统结构图
工业机器人仿真系统有很多优点,工业机器人仿真[6]是通过计算机对实际的机器人系统进行模拟[7]的技术。机器人仿真系统可以通过单机或者多台机器人从而组成工作站或是生产线。这些工业机器人的仿真软件,可以在制造单机和生产线产品之前模拟出实物,这不仅可以缩短生产的工期,还可以避免不必要的返工。
(2)抓手设计
市场上现有的工业机器人通常分为专用型和通用型,但不论是那种类型,机器人在抓取工件时只能根据工件的形状更换专用的抓手。这样频繁更换抓手除了降低了工作效率,还在一定程度上加快了机械臂的磨损和机器的老化,并且在运输和后期的维护等方面存在着诸多不便。
为了提高机械臂的灵活性,达到提高生产效率和稳定性的目的,本文模仿人手结构,并结合具有柔性抓取及力反馈的设计,设计了一款能够自主随抓取物品调节、灵活度更好的抓手,使其能够实现对更多种类物体的搬运,其结构如图2所示。
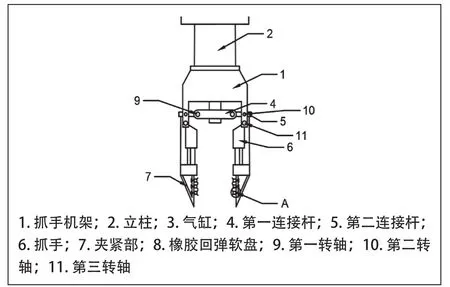
图2 抓手外形示意图
机械臂结构包括机械爪、手臂支架、第一伺服电机、第一丝杠、第一轴承机座、第一丝杠螺母、第一连接件和第二轴承机座;第一丝杠与第一伺服电机的输出轴传动连接;第一丝杠穿设于第一轴承机座内;第一丝杠螺母套设于第一丝杠上并与第一连接件周向固定连接,第一连接件连接抓手;抓手连接手臂支架;第二轴承机座内设置有至少一个第二轴承,第一丝杠穿设于第二轴承内。
3 仿真系统调试与结果
数字孪生的一个重要用途,就是针对系统的调试。智能化的系统往往特别复杂。单纯的算法设计,其运行结果如何,真的难以预知。针对系统调试过程,数字孪生的价值是非常大的。半实物仿真调试系统基于数字孪生概念设计。
数字孪生在化工和冶金领域,往往采用二维的调试画面,而在机械领域,在系统调试、分析故障等场合,则往往采用三维动画,这样设计是采用三维动画不仅更容易被人理解,而且在调试过程中,会对人的分析、管理非常有帮助,其调试效果显著。
基于以上分析,综合目前存在的车间机械电气综合安装调试环节稳定性不好,周期长等方面的缺陷,本文所涉及的模拟仿真调试系统采用:在三维动态[8]设计的基础上融合电气设计,将电气逻辑进行设计后,按照实际工作需求以电气信号作为虚拟工厂动作的触发[9]。这样设计的目的,不仅解决了系统可达性和干涉问题,经过调试,还能生成经过验证的电气控制信号,进而进一步缩短开发周期。
本文所设计模拟过程如图3所示。
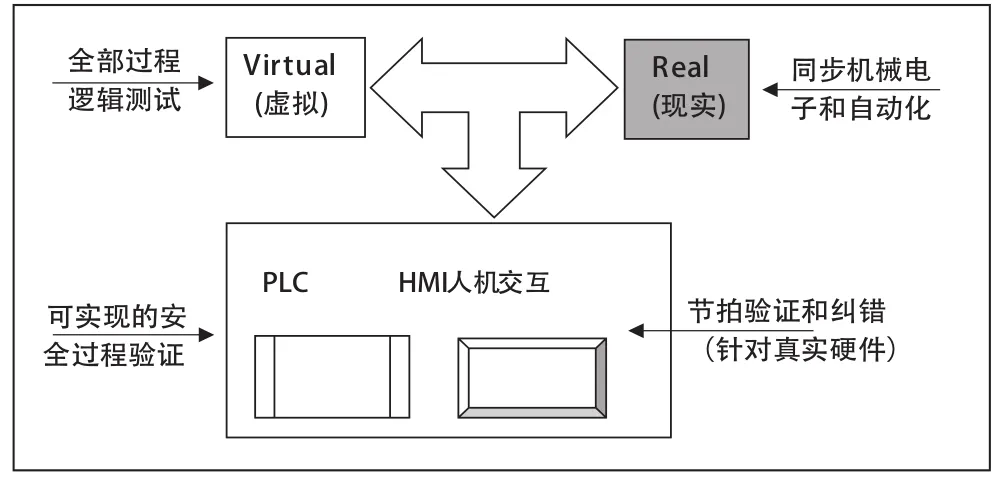
图3 系统模拟流程
实验室系统联调及数据采集实物图如图4所示。
图4 系统联调及数据收集实物图
系统联调所测结果如表1所示。

表1 虚拟调试情况统计
通过对实验数据分析,不难发现,本文所设计的系统实现如下效果:
(1)实现了机械与电气的融合设计,可呈现出与实际工厂相同的虚拟孪生系统;
(2)智能制造工厂一般选用工业机器人作为执行机构,对于复杂生产工序的工厂,应用本方法可大大缩短建设周期,可缩短为现有方法所需时间的15%;
(3)仿真调试系统兼容性强,适用于各生产加工企业,能满足不同行业的定制需求。
4 结语
本文重点对机器人的结构、运动学和动力学进行了分析,该设计的目的是研发出一款工业机器人半实物虚拟仿真系统[10]。其研究的主要内容及效果如下:
(1)实现了机械与电气的融合设计,呈现出与实际工厂相同的虚拟孪生系统。
(2)基于OPC 协议的虚拟调试互联。
根据PS 软件提供的同PLC 连接方式的不同,虚拟调试系统也有不同的互联方式。其中OPC 协议连接的方式是通过在PC 上建立OPCServer,作为信号传递的中转站。
(3)低成本系列化工业机器人开发。
开发的机器人需要具有以下功能,能够与OPC系统通讯,代替实际机器人进行仿真。采用步进电机提供驱动,机身采用模块化组装工艺,机器人本体的设计原则为即减低本体质量又保留较强性能。运动控制采用多轴联动插补控制算法,保证了机械臂具有高精度的控制。LT机器人功能强大,其功能涵盖了现有工业机器人全部的基本功能,同时为机器人配备了视觉功能,更进一步提高了机器人的智能化。
