4LZ-8稻麦收获机拨禾轮辐盘模态分析*
2021-06-16陈秀生薛志原唐怀壮李孟威张同帅吕国栋
陈秀生,薛志原,唐怀壮,李孟威,张同帅,吕国栋
(济南大学机械工程学院,山东济南250022)
0 引言
我国的农业机械化范围比较广泛,其中,粮食作物生产的机械化是重中之重。割台作为收获机的切割部分,应该让小麦粒在收获时减少掉落,同时还应尽量减少收割时造成的破损和机器对谷粒的损伤。而拨禾轮作为割台的关键组成部分之一,其主要作用是将待切割作物的茎秆引向切割器,并在引导过程中扶正倒伏作物。切割时支撑茎秆,完成切割,并将切割后的茎秆推到割台螺旋推运器上,以避免茎秆聚积[1-2]。
拨禾轮的振动容易造成收获时谷物的散落,增加收获损失,同时也会造成零部件的失效和变形,减少机器的使用寿命[3-4]。而拨禾轮辐盘作为拨禾轮的主要部分,其在收割时受振动的影响最为强烈,在稻麦成熟季节集中,收获任务异常繁重,有时收割机需要跨区域作业,需要收割机长时间保持高效作业,在高强度的作业下,收获机拨禾轮辐盘的可靠性显得至关重要[5]。而当前对拨禾轮辐盘的振动分析大多数是自由模态分析或者约束模态分析,因此,文章通过进行线性摄动模态分析,并通过与约束模态进行对比,使分析结果更加准确。
1 拨禾轮结构
拨禾轮主要是由带弹齿的管轴、辐盘、偏心辐盘、主辐条(左、右两组)、偏心辐条、曲柄、拨禾弹齿、拨禾轮主轴等组成,图1中2是固定拨禾轮轴上的辐盘,1是调节用的偏心辐盘。3是拨禾齿轴,其上固定拨禾弹齿4。辐盘上的辐条与拨禾齿轴铰接,在拨禾齿轴的右端有曲柄连接偏心辐盘上的辐条,且右侧辐盘与偏心辐盘的两组辐条是基本相同的,所以其长度也相等。偏心距的长度一般为50~80 mm,由于曲柄与两个轮盘铰接在一起,所以曲柄长度要和偏心距长度相等,保证拨禾轮工作时可以产生偏心运动。偏心辐盘可绕轴心转动,当调整偏心辐盘的位置,就可以改变偏心辐盘与辐盘的相对位置,拨禾轮旋转时,不论转到哪个位置,其曲柄长度始终与其偏心距长度相等,拨禾弹齿也始终保持竖直向下[6-7]。
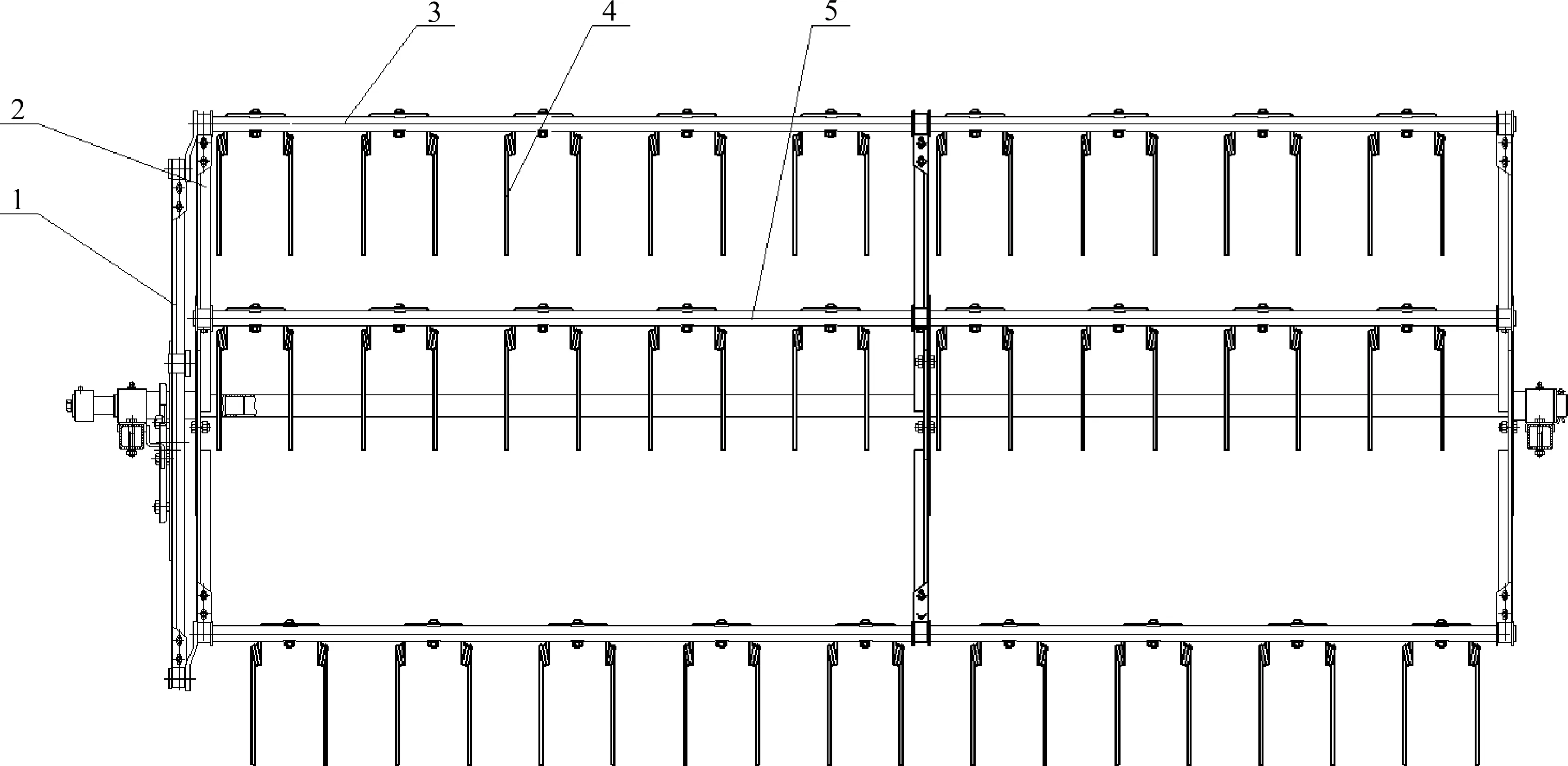
图1 拨禾轮结构Fig.1 Reel structure
拨禾轮的圆周速度Vb与机器前进速度Vm的比值λ称为拨禾速比,拨禾轮是否能够正常运行,取决于它的拨禾速比是否大于1。虽然增大拨禾速比λ将使拨禾轮工作时的作用范围增大,但是如果机器速度Vm恒定,增加拨禾速比λ值将会使拨禾轮的圆周速度Vb增加,这时拨禾轮将会因为转动速度增加而对作物穗的冲击增加,从而增加谷物损失[8-9]。
因此,λ值的选择需要根据收获时作物成熟程度、作业速度等很多条件来确定。如图2对已研制出的4LZ-7智能化联合收获打捆机在山东大启机械公司的“小蒙山”高端智能农业装备示范园和费县胡阳镇水稻田进行水稻和小麦的收割实验,保持稻麦联合收获机作业速度为1.4 m/s,通过改变拨禾轮的圆周速度Vb,观察其不同拨禾轮转速下作物收获时的谷物损失如表1所示,通过结果对比得出拨禾速比λ为1.6时拨禾轮收获条件最佳。

图2 联合收获机收获试验Fig.2 Combine harvester harvest test
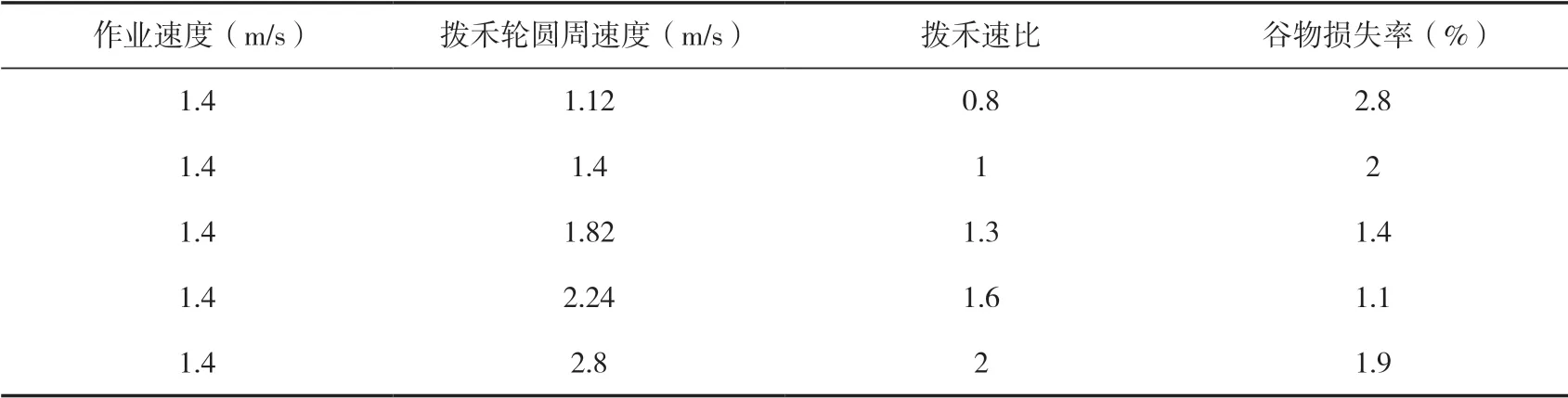
表1 不同拨禾速比下的谷物损失率Table 1 Grain loss rate under different grazing ratios
4LZ-8稻麦联合收获机作业速度Vm为1.1~1.96 m/s,D=1 000 mm代入拨禾轮的转速n的公式为:

式(1)中,n为拨禾轮工作时的转速(r/min);Vm为收割机工作时的速度(m/s);D为拨禾轮的直径(m);λ为拨禾速度比。得出当Vm=1.1~1.96 m/s时,拨禾轮转速n=33.7~60 r/min。
2 拨禾轮辐盘模态分析
2.1 拨禾轮辐盘线性摄动模态分析
拨禾轮辐盘是拨禾轮中受振动影响最严重的部分,为了减少计算量,同时加快计算速度,选择拨禾轮的辐盘,对拨禾轮辐盘进行线性摄动模态分析[10]。
但是结构模型在不同的外载荷下会呈现出不同的动力学特征,当物体受外力作用时,它本身的刚度和固有频率都会改变,所以如果只是对模型进行自由模态分析或者约束模态分析,并不一定能够得出合适的结果。当稻麦联合收获机进行收获时,由于拨禾轮旋转,必然会使拨禾轮辐盘刚度发生变化,从而导致其固有频率发生变化,因此需要给其施加一个预应力进行分析[12]。
对其进行线性摄动模态分析,首先建立一个静力学分析界面,将拨禾轮辐盘材料设置为Q235结构钢,在材料库中添加此材料,并将屈服强度σs设置为235 MPa,密 度ρ设 置 为ρ=7.85×106kg/mm3,并 设 置 弹 性 模 量E=200 GPa,泊 松 比μ=0.3,屈服强度=225 MPa[13]。在模态分析中,一般约束关系都采用绑定和不分离的接触方式,由于拨禾轮辐盘实际状态是焊合的,所以辐条跟辐板采用绑定的约束关系。
在模型分析中,四边形网格与六边形网格对于模型分析结果并不大,但是却能很大地影响运算效率,所以选择用四边形网格进行模型划分,并将Transition调整为slow,使网格划分更加平缓,同时为了保证网格精度以及减小运算量,设置整体网格密度为6 mm,并将辐板和辐条的薄板侧板设置为2 mm,共划分出157 795个节点,77 449个元素。
在拨禾轮实际工作情况中,拨禾轮辐盘z方向的旋转自由度应该是不受限制的。以拨禾轮辐盘中心孔为坐标原点,在拨禾轮辐盘模型内建立一个新的坐标系,并通过displacement约束方式,选择新坐标系将Z方向的旋转自由度释放出来,通过公式(1)计算得到拨禾轮的转速n=33.7~60(r/min),取中间值42.2(r/min),即4.42 rad/s,所以在拨禾轮辐盘的中心孔内施加一个4.42 rad/s的转速,之后对其进行后处理,得到如图3所示静力学分析结果,模型的主要变形表现为沿径向向外扩展,这与实际情况是吻合的。
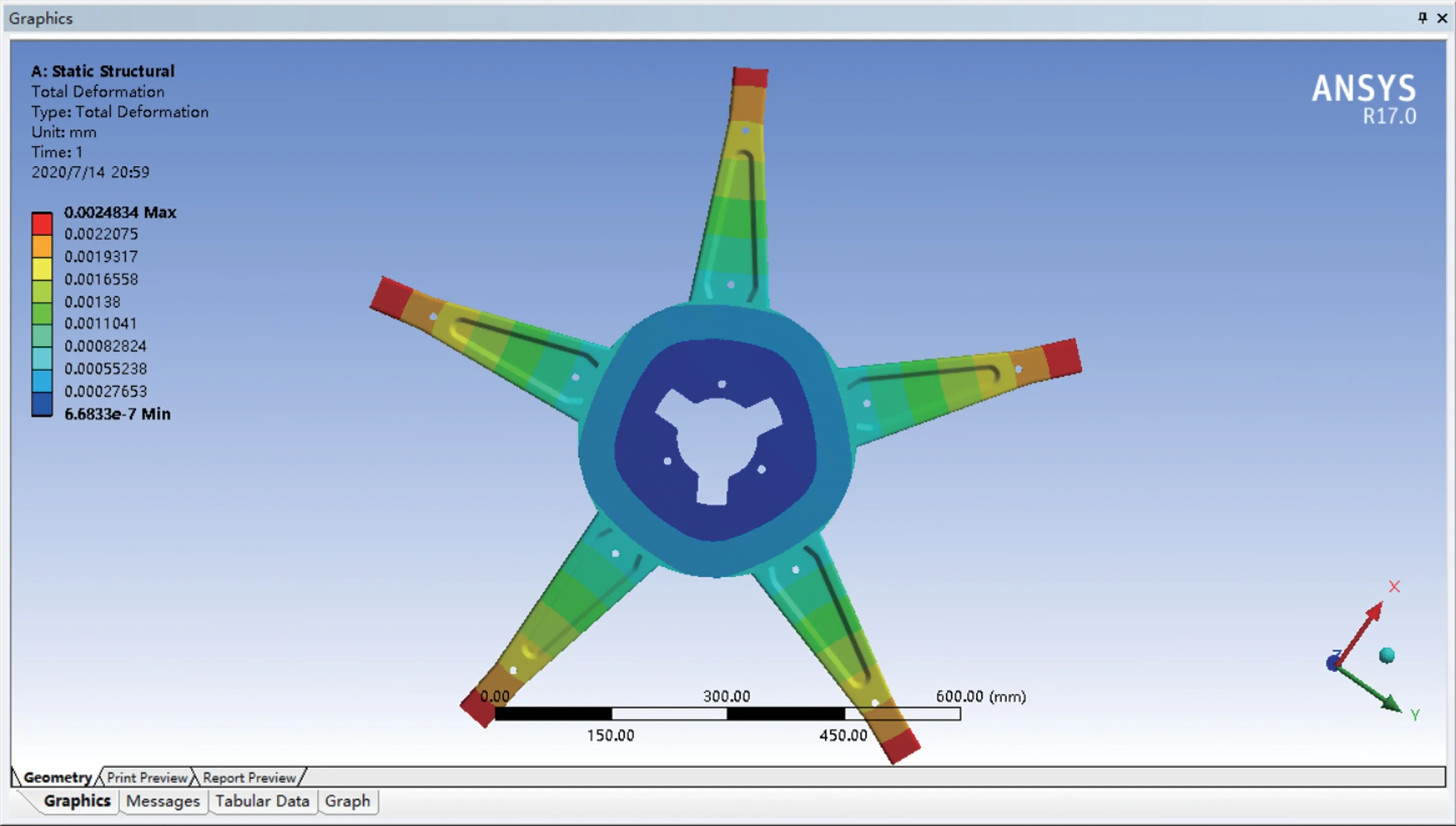
图3 拨禾轮辐盘静力学分析Fig.3 Static analysis results of reel spokes
对模态中的预应力界面进行设置,将预应力通过时间进行定义,并选择读取系统最后的计算刚度,之后在Modal中插入4.42(rad/s)的转速,并打开阻尼设置,通过后处理得出结果如表2所示。
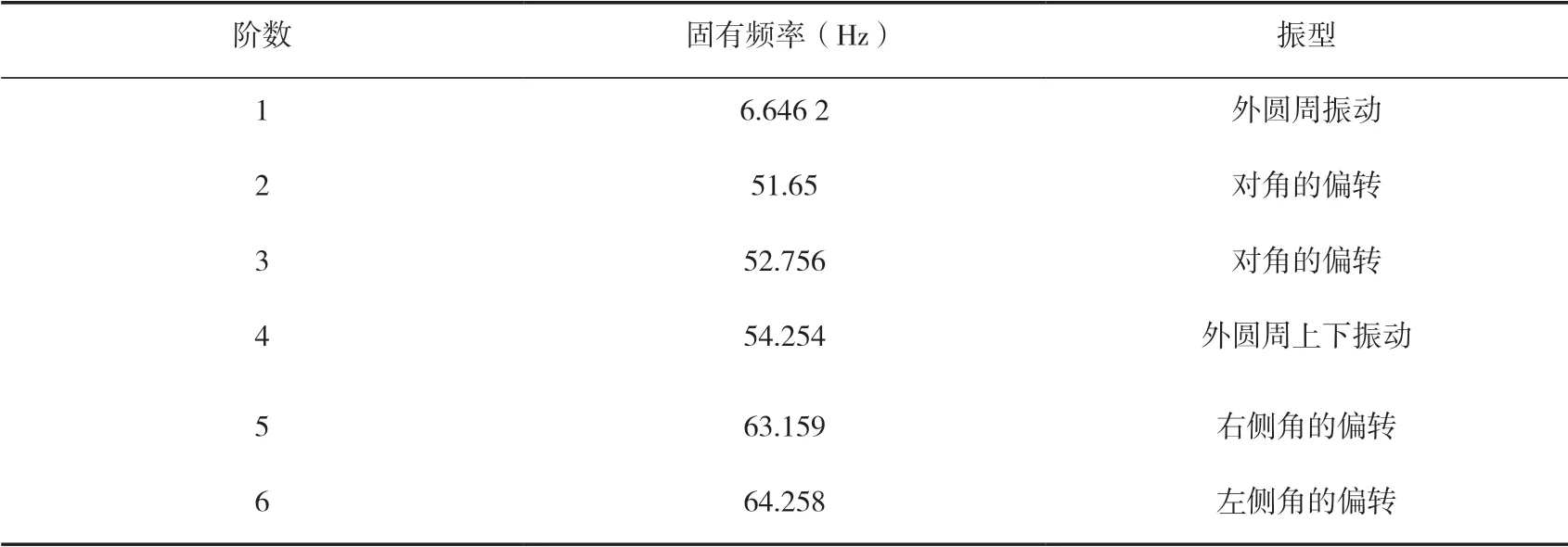
表2 线性摄动模态分析下拨禾轮辐板前6阶固有频率及振型Table 2 The first 6-order natural frequencies and mode shapes of the reel spokes under linear perturbation mode analysis
结合图4所示,拨禾轮辐盘的第1阶模态振型主要表现其旋转特性,主要为从圆心向四周逐渐扩散,固有频率为6.646 2 Hz,第2、3阶模态为对称形式,表现为对角的偏转,固有频率为51.65 Hz和52.756 Hz,第4阶模态振型表现为外圆周上下振动,固有频率为54.254 Hz,第5、6阶模态同样为对称形式,表现为左侧角与右侧角的偏转,固有频率分别为63.159 Hz和64.258 Hz。
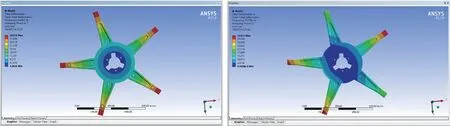
图4 典型线性摄动模态的模态振型Fig.4 Mode shapes of typical linear perturbation modes
2.2 拨禾轮辐盘约束模态分析
为了验证线性摄动模态分析是否正确,对拨禾轮辐盘进行约束模态分析,对比分析结果,看其振型是否应该与实际工作情况相同。
创建一个模态分析界面,将拨禾轮辐板模型导入,按照与线性摄动模态分析相同的材料条件和网格划分条件进行设置,并通过displacement约束方式,选择新坐标系将Z方向的旋转自由度释放出来[14]。最后通过后处理得出6阶模态分析结果如表3。

表3 约束模态下拨禾轮辐板前6阶固有频率及振型Table 3 The first 6-order natural frequency and mode shape of the reel spokes in the constrained mode
将约束模态与线性摄动模态分析进行对比,发现线性摄动模态分析与约束模态分析得出的结果相比,约束模态的固有频率均大于线性摄动模态的固有频率。同时,约束模态分析得出的振型如图5所示,均与线性摄动模态的振型相同,第1阶模态同样主要表现其旋转特性,振型从圆心向四周逐渐扩散,其固有频率为13.609 Hz,其他几阶模态振型也都与相对应的线性摄动模态相同,只有固有频率大于线性摄动模态,这表明拨禾轮辐盘线性摄动模态分析是正确的。当拨禾轮辐盘在旋转时,其旋转所带来的旋转软化现象,使得其刚度会变小,固有频率也会变小[15]。
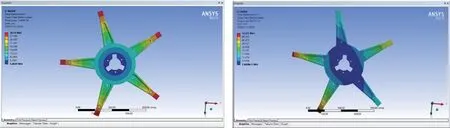
图5 典型约束模态的模态振型Fig.5 Mode shapes of typical restrained modes
3 拨禾轮辐盘振动结果分析
由于稻麦联合收获机在收获时,拨禾轮主要受到割刀的往复运动以及搅龙的转动所带来的振动激励。摆环机构在作业条件下主轴转速大约为500~600(r/min),所以得出割刀往复运动所产生的激励频率大约为6.7~10 Hz。通常认为,当外界激励频率等于固有频率时,系统会发生共振。但是当外界激励频率接近固有频率20%这个共振带时,系统也会发生共振,由于第1阶频率为6.646 2 Hz,即共振带为5.316 96~7.975 44 Hz。但是由于割刀的往复运动主要产生的是沿着拨禾轮轴的轴向激励,即模型坐标系Z方向的激励,所以将拨禾轮辐盘模态数量增加为30阶,得出模态分析信息如图6所示,通过信息可以看出,第1阶振型在Z方向上的参与系数非常小,其振型相差甚远。而第4阶振型如图7所示,主要表现为Z方向上的振动,但是由于第4阶振动频率为54.186 6 Hz,远大于割刀的往复运动所产生的激励频率,所以并不会导致共振。
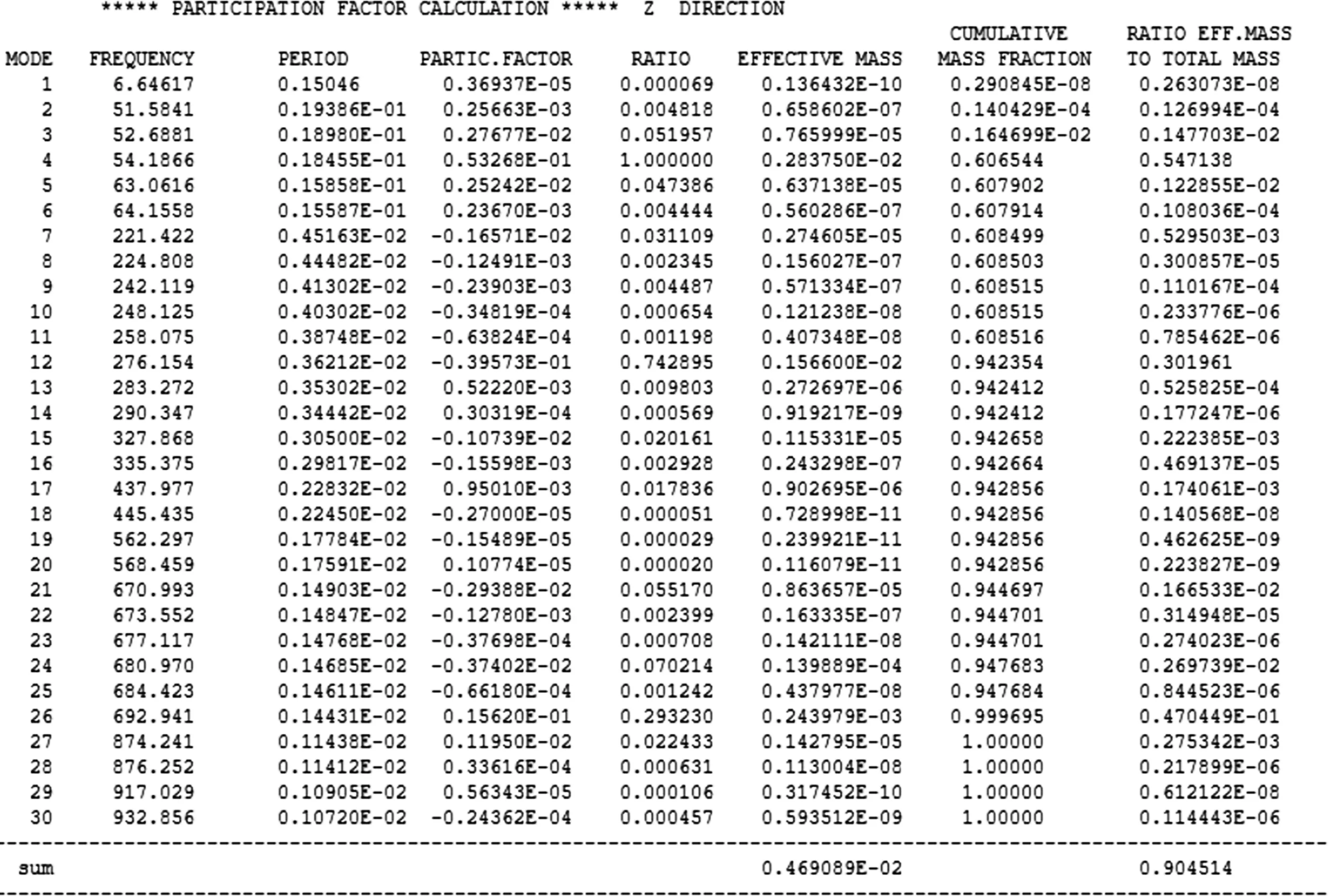
图6 模态分析信息Fig.6 Modal analysis information
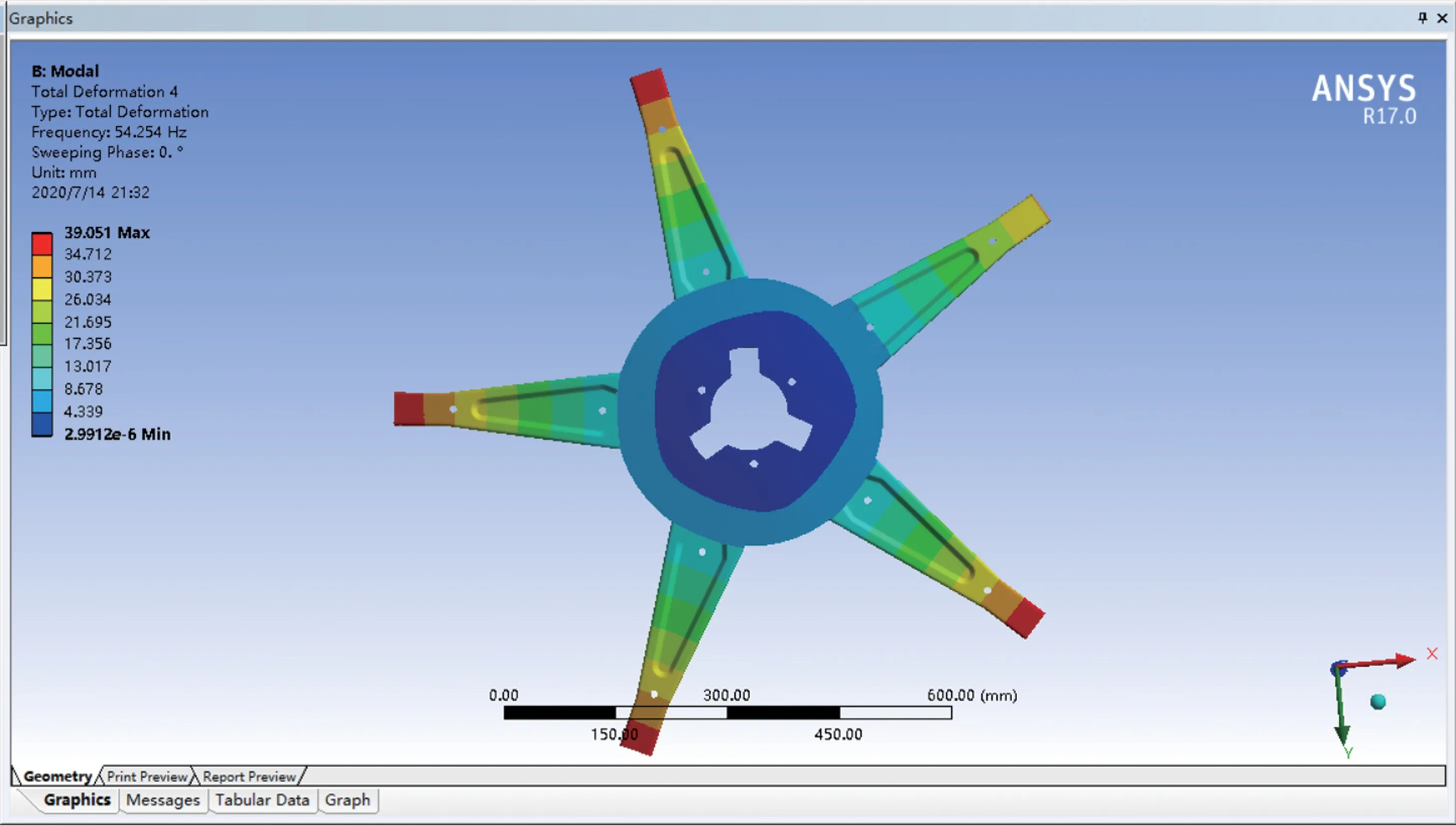
图7 拨禾轮辐盘线性摄动模态的第4阶振型Fig.7 The 4th Vibration Mode of the Linear Perturbation Mode of the Spoke Disk of the Reel
为了防止割台因转速太快而产生振动过大使得输送时掉粒过多,搅龙的转速一般都比较低,转速一般为210 r/min,对应的激励频率约为3.5 Hz,远低于拨禾轮辐盘的固有频率,所以不会导致共振。
4 结论
(1)对4LZ-8稻麦联合收获机拨禾轮结构进行设计分析,明确拨禾轮各部分连接关系,并通过试验得出拨禾轮的最佳拨禾速比λ=1.6,并通过计算得出拨禾轮转速n=33.7~60 r/min 。
(2)通过对模型设置材料、划分网格、添加约束,对拨禾轮辐盘进行线性摄动模态分析,得到6阶模态频率为6.646 2~64.258 Hz,并得出拨禾轮辐盘的第1阶模态振型主要表现其旋转特性,主要为从圆心向四周逐渐扩散,第2、3阶模态为对称形式,表现为对角的偏转,第4阶模态振型表现为外圆周上下振动,第5、6阶模态同样为对称形式,表现为左侧角与右侧角的偏转。之后通过约束模态分析得到6阶模态频率为13.609~71.052 Hz,并与线性摄动模态分析所得到的振型进行对比,发现模态振型都与相对应的线性摄动模态相同,只有固有频率大于线性摄动模态,表明线性摄动模态分析正确。
(3)通过对拨禾轮所受到的割台其他部分的激励分析,得出割刀往复运动所产生的激励频率为6.7~10 Hz,由于第1阶频率为6.646 2 Hz,即共振带为5.316 96~7.975 44 Hz,所以割刀可能会与拨禾轮辐盘发生共振,因此将拨禾轮辐盘模态数量增加为30阶,分析其在模型坐标系Z方向的参与系数,发现第1阶振型在Z方向参与系数很小,不会导致共振。而搅龙激励频率约为3.5 Hz,不在共振带内,也不会导致共振。
