一种基于神经网络的多智能体建模技术
2021-06-16张增辉唐平马若雯
张增辉 唐平 马若雯
(中国电子科技集团公司电子科学研究院 北京市 100041)
在过去的二十年中,人群多智能体建模主要有两种方法:社会力模型和元胞自动机模型。前者是连续的,后者是离散的,通常情况下社会力模型仿真过程中需要进行更多的计算。随着计算机计算水平的增加,社会力模型因其连续性的特点逐渐成为主流[1,2]。社会力模型的最大特点是其普适性,它可以轻松应用于任何场景,但其微观行为和宏观统计数据与真实情况存在一定差距。
目前,越来越多的研究开始专注于使用神经网络来进行人群运动仿真。Ma 和Lee[3]提出了一种基于人工智能的人群运动仿真方法,该方法需要通过马路上的监控收集大量的微观行人运动数据,并通过一个神经网络来学习,他们的结果显示该神经网络可以模拟行人通过人行横道时的微观行为。与此同时,Alahi[4]利用循环神经网络完成了在指定区域内行人轨迹的预测工作,还有许多研究[5-9]表明神经网络模型比社会力模型更能准确的模拟行人行为,但普遍存在场景约束。
本文所设计的行人神经网络模型将在满足多场景仿真要求的同时,力争在准确性方面超过社会力模型,这主要取决用于训练的数据集的质量。
1 人工神经网络的搭建
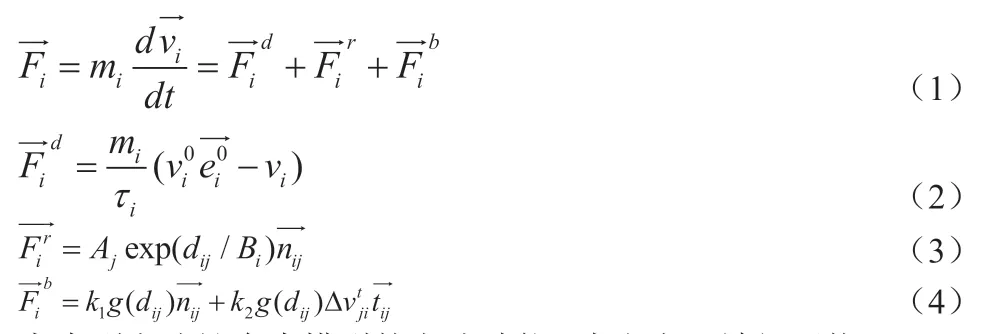
根据社会力模型,行人在t 时刻的速度变化由公式(1)-(4)得到:
考虑到上述社会力模型的上述功能,本文人工神经网络(ANN)的输入设计如下:
(1)本文由A*算法计算出的期望的运动方向由表示。这个运动方向可以代表目标的期望方向和避开障碍的计划方向。它代表
(3)采用数组W,如公式(5)所示,来存储主体人物周围的人群信息。为了实现模型的计算复杂度和保真度之间的平衡,考虑五个最近的邻居来计算 的相互作用力。如图1 所示:
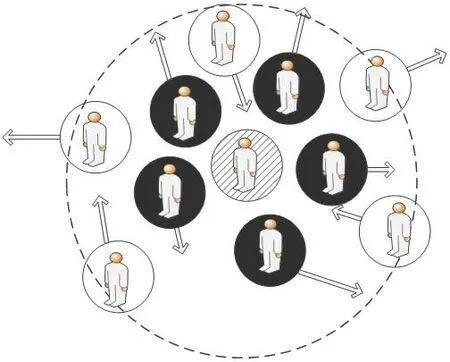
图1:相互作用力计算示意图
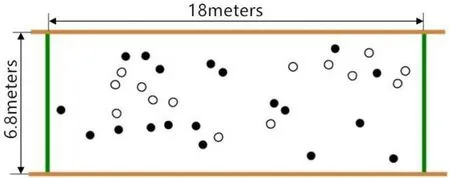
图2:对流现象仿真图

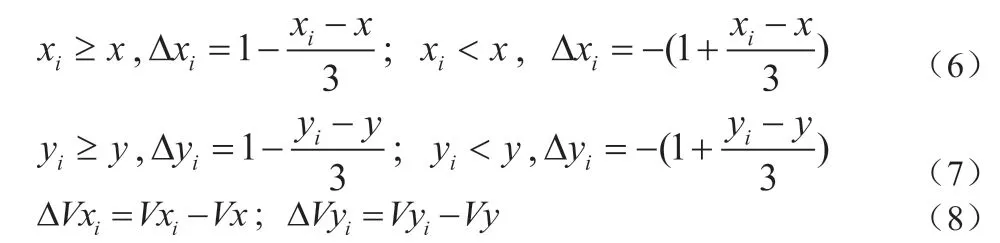
W 是20 个元素的相邻数组。因为人工神经网络需要固定数量的输入,但是邻居数量可能少于5 个。为了解决这个问题,本文使用归一化的 和 来表示该行人与其邻居之间的相对位置。当邻居靠近主体时, 和 接近1。当邻居数目小于5 时,相应空余的为0。W 数组内数据的计算公式如公式(6)-(8)所示。
2 数据采集与网络训练
2.1 数据采集
本文首先利用仿真模拟行人典型行为,并采集数据来验证行人神经网络的有效性。针对典型行为进行的实验如下。

图3:圆形障碍物堵塞
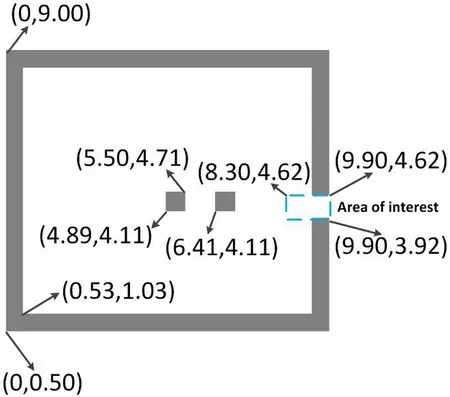
图4:验证场景示意图
2.1.1 对流现象
当人群朝着相反的方向前进时,人群会自行组织创建不同的通道。从图2 可以看出行人被分为黑白两种颜色,分别从两边的入口进入。实验中设置行人生成速率为1 人/秒,测试持续时间为100 秒。
2.1.2 拥挤堵塞
假如在紧急情况下需要从出口逃生,大密度的人群往同一个狭窄出口移动,行人不会自觉排队,那么行人就会在出口处产生如图3 所示的拱形堵塞。实验中设置疏散行人总数为100 人,障碍物尺寸为矩形2 米*2 米,圆半径为1 米,门宽为1.3 米。
2.2 神经网络的训练
本文中人工神经网络输入单元的数量是22 个,输出单元的数量是2 个。该网络有两个隐藏层,都有60 个神经元,主要学习方法是反向传播(BP),它将预测结果与实际数据之间的差异进行反馈,并调整权值以达到误差的最小化。该过程被重复许多次,直至迭代次数达到预定值,或者均方误差(MSE)下降到某个阈值以下。本文中迭代次数的上限为1000次,均方根RMSE误差的阈值为0.05。在所提出的人工神经网络中,90%的样本(36573)作为为训练组,10%为作为测试组。最终,本文所设计的人群神经网络模型的训练均方误差(MSE)为0.050504,测试均方误差为0.06179。
3 仿真与神经网络验证
验证场景为房间疏散场景,如图4 所示。
本文基于验证场景对人工神经网络模型进行了测试,测试效果如图5、图6 所示。左图为行人的运动轨迹图,右图为仿真进行到5s 时的截图。
从图中可以看出,神经网络模型与社会力模型相比,人与人之间的相对距离更加真实,不现实的轨迹波动更少。通过计算每1/15s 步长内两个模型与实际行人位置的误差,社会力模型的平均误差为(x: 0.201m, y: -0.151m),神经网络模型的平均误差为(x: -0.177m, y: -0.160m)。这意味着社会力模型和神经网络模型在垂直(y)方向上有类似的误差,但社会力模型在水平(x)轴上的误差相对较大。

图5:社会力模型测试轨迹图及实验截图

图6:人工神经网络模型测试轨迹图及实验截图
4 结束语
本文设计了一个面向多场景的神经网络人群运动模型,可以既满足普适性的要求,又能在微观表现、准确性和真实性方面超过现有的主流人群模型,如社会力模型。
本节提出的神经网络人群模型是由数据驱动的,将多场景行人行为封装成四层神经网络,从而产生行人的速度和位置。仿真结果表明,本文设计的人工神经网络模型不会像社会力模型那样出现严重的不真实的位置波动,并且在速度密度曲线方面非常接近真实情况。本模型是由数据驱动的,因此在神经网络模型结构确定的情况下,随着训练数据质量和数量的不断提高,本模型可以更加接近真实情况。此外,社会力模型要求仿真步长必须小于0.008 秒,否则仿真中的行人会出现非正常移动,而本文所设计的神经网络可以在0.06 秒步长下成功模拟行人行为,仿真性能优异。
