海上风电场桩基水下结构及海缆接入端检测
2021-06-15纪立军陶伟
纪立军?陶伟


摘 要:海上风电场桩基水下结构及海缆长期承受各种荷载、高水流作用,在经过长期运行后,安全检测问题日益突出。鉴于海上风电场水下工程质量的严峻性及对海上风电场后期运维的重要性,本文详细介绍了海上风电场桩基水下结构及海缆接入端检测的工作方法,并分析了海上风电场桩基结构与海缆接入端的检测实例,提出了相关意见。
关键词:海上风电;图像声呐;潜水探摸;海缆接入端
中图分类号:TM614;TU753文献标识码:A 文章编号:1003-5168(2021)05-0038-03
Abstract: After long-term operation, the problem of safety detection becomes increasingly prominent. In view of the seriousness of the quality of the underwater engineering of offshore wind farm and the importance of the later operation and maintenance of offshore wind farm, this paper introduced in detail the detection methods of the pile foundation underwater structure and the submarine cable access end of offshore wind farm, analyzed the detection examples of the pile foundation structure and the submarine cable access end of offshore wind farm, and put forward some relevant opinions.
Keywords: offshore wind power;image sonar;diving exploration;submarine cable access end
海上风电场桩基水下结构及海缆接入端检测工作事关风电桩基安全,因此,加强对其的检测十分重要。对于海上风电场,由于水域环境的复杂性和水下病害的隐蔽性,需要关注的安全问题与桩基水上部分有很大不同。海上风电场桩基的安全质量问题主要包括桩基受水流冲刷问题、桩基结构及海缆接入端的状况等。为了检测和预警此类问题,需要采用不同的技术手段。但目前,国内仍然采用潜水员探摸摄像的方式开展桩基结构及海缆接入端的检测。本文介绍一种利用声呐技术与潜水探摸或遥控无人潜水器(Remote Operated Vehicle,ROV)相结合的方式,从宏观和微观方面,详细检测桩基结构及海缆接入端的水下状况,并通过工程实例应用说明其适用性和推广价值。
1 桩基结构及海缆接入端检测的方法
1.1 水下结构的直接观察检测
目前主要使用潜水员和水下机器人(主要是ROV)进行水下结构检测,包括检测J型管喇叭口海缆情况、海生物附着情况、防冲刷保护措施的有效性等。工作时一般要求海水流速在2节以下且水体透明度较好。
目视检查(又称I级检测)是最基本的检验方法[1]。它是通过潜水检验员用手及简单的测量工具,并结合水下录像等手段,去观察和记录表面所能发现的问题,对被检结构进行表面检查的一种方法。利用该方法可详细观察结构表面是否被重物击伤或存在扭曲、弯曲、凹凸变形等情况,并对牺牲阳极和海生物的分布进行检查。当需要进行详细测量(如测量海生物覆盖厚度、牺牲阳极电位、损伤大小等)时,一般需要通过潜水员进行,或采用有水下吸附能力或水下固定能力的ROV进行。
通过潜水员或ROV进行水下检测时,还要根据水质清浊程度,选择合适的携带设备。在水体透明度较好时,可携带光学摄像机进行检查,如果水体比较浑浊,可攜带高频的二维图像声呐进行检测[2]。
1.2 水下结构的间接扫描检测
水下结构的间接扫描检测主要包括多波束扫测(倾斜安装扫测)、水下三维扫描声呐扫测和水下三维激光扫描仪扫测等方式[3]。
声学多波束测深一直是局部冲刷监测最常采用的一类技术。按照具体实施方式的不同,可以将多波束测深冲刷监测分为固定式和移动式两类。固定式多波束测深冲刷监测方式是利用固定在桩基上的测深装置对其附近的局部冲刷实施无人值守、不间断监测,而移动式多波束测深冲刷监测方式则主要是通过水上载体携带测深装置实现对局部冲刷的定期监测。多年的工程实际应用表明:声学多波束测深冲刷监测具有精度高、工作稳定、可操作性好、能实现对冲刷发展全过程的实时监测等诸多优点。水下三维扫描声呐具有混浊水环境下工作能力强、量程较大等优势[4]。水下三维激光扫描仪量程相对较小,但在较好的水体环境下,其扫测精度远高于水下三维扫描声呐,扫测精度主要受水体透明度、环境背景光线、表面材料、到目标的距离等因素的影响。
水下结构精密扫描的作业方式主要为定点安装式。定点安装式为单站固定位置扫测,在海底流速较小时,通过控制云台旋转实现对目标物不同角度的扫描,获得扫描区域三维点云数据。多站扫测结束后通过专业数据处理软件进行拼接,形成最终的三维点云图[5-6]。
2 海上风电场桩基结构及海缆接入端检测案例
本文研究的海上风电场位于如东县近海海域,于2016年4月25日正式开工建设,2016年12月23日首台机组并网发电,2017年9月30日正式进入商业运营。风电场海域水体浑浊,故无法采用目视及光学摄像机对桩基结构及海缆接入端细节进行检测,只能采用声学的方法进行检测。通过综合比较,本工程采用潜水员手持高频二维图像声呐及船载三维实时图像声呐设备对桩基结构及海缆接入端进行系统检测。
本次工程对如东八仙角风场的70台风机及2座海上升压站进行了检测,检测内容主要是对桩基的海缆接入端情况进行扫测及探摸。接下來对本项目6#桩的检测结果进行分析。
2.1 桩基海缆接入端三维图像声呐扫测情况
通过船载三维实时图像声呐系统扫测6#桩基海缆接入端情况,获得6#桩基的海缆接入端声呐图像,如图1所示。从图1可以看出,J型管喇叭口距离泥面高度8.04 m,6#到5#海缆入泥端距离喇叭口的水平距离为13.59 m,6#到7#海缆入泥端距离喇叭口的水平距离为6.00 m。6#到5#海缆悬空段整体呈东西走向,海缆走向同J型管喇叭口的指向呈大角度。6#到7#海缆整体呈南北走向,海缆走向同J型管喇叭口的指向一致。
2.2 桩基海缆接入端潜水员探摸与检测情况
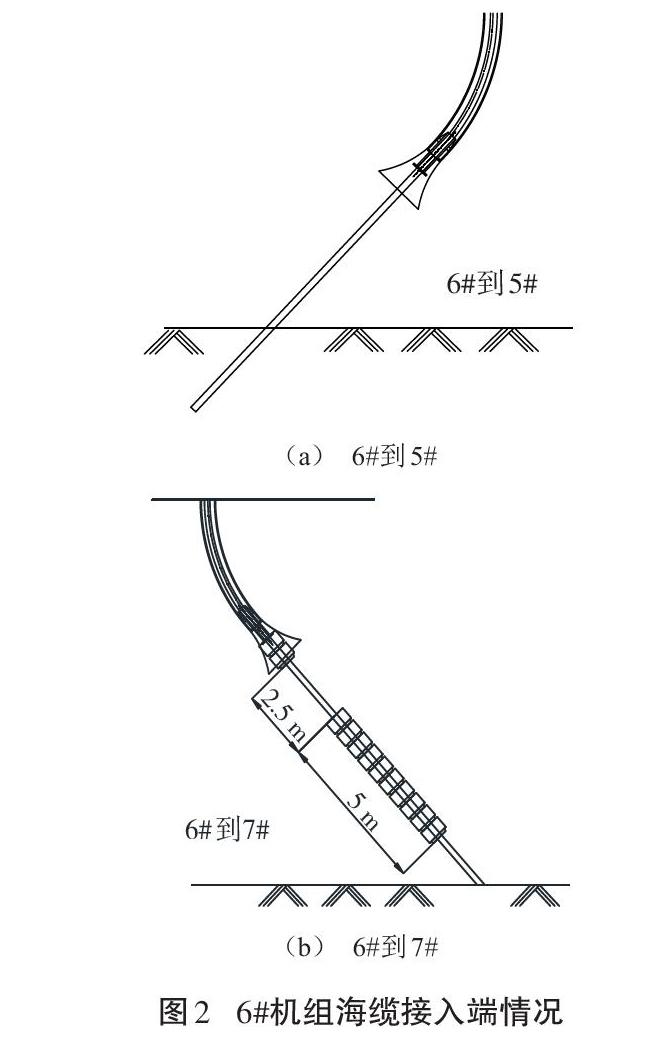
通过潜水员手持高频二维图像声呐系统扫测6#桩基海缆接入端情况,获得6#桩基连接5#和7#桩基的海缆的J型管喇叭口、中心夹具及弯曲保护装置的状况的声呐图像,具体如图2所示。
通过探测可知,从6#到5#,中心夹具在J型管中,未脱落;探摸至海缆入土端,未发现弯曲限制器;海缆无破损,海生物附着在海缆上。但是,6#到5#海缆接入端弯曲限制器缺失。从6#到7#,中心夹具在J型管中,未脱落;中心夹具同第一、二节弯曲限制器相连接,第二节弯曲限制器同第三节弯曲限制器间断开,断开距离约2.5 m;弯曲限制器长度约5 m;海缆无破损;弯曲限制器上有海生物附着。但是,6#到7#海缆接入端存在弯曲限制器脱开的问题。
图3是6#机组海缆接入端双频声呐扫测图。从图中可知,6#到5#海缆在接入端同喇叭口朝向有较大夹角,6#到7#海缆位置正常。
2.3 建议
随着ROV技术的快速发展,未来可利用大中型ROV搭载二维或者三维图像声呐对桩基结构及海缆接入端进行检测,减少潜水员的水下作业的风险。
从海缆接入端扫测情况可知,6#和5#接入端处海缆同喇叭口夹角较大,且弯曲限制器缺失;6#到7#接入端处海缆走向正常,但存在弯曲限制器断开的问题。
对于6#到7#海缆弯曲角度过大,弯曲限制器缺失的情况,应密切关注海缆的健康状态,及时开展海缆治理工作。
3 结语
通过三维实时图像声呐对桩基海缆接入端的水下状态进行扫测,获得高精度三维立体水深点云数据,可以分析海缆的走向、入泥角度等重要信息;通过潜水员手持高频二维图像声呐对海缆接入端的J型管喇叭口及海缆保护装置进行检测,获得高分辨率的声呐图像,可以分析海缆与喇叭口的夹角及弯曲保护装置的完好情况。经过实际应用证明,对桩基结构及海缆接入端的检测非常必要,通过检测与探摸,可以让海上风电场的水下质量可视化。这些检测工作为海上风电场水下工程质量提供了可靠的数据支撑。
参考文献:
[1]房世龙,施小飞,倪飞.桥墩局部冲刷远程实时监测技术研究进展[J].公路工程,2015(6):88-95.
[2]孙明皓.基于重力驱动磁传感的河床冲刷监测系统研究[D].济南:山东大学,2019:1-4.
[3]胡卫震.水下无损检测技术的应用研究[J].科学与信息化,2018(28):10.
[4]陈晓辉.面向海洋工程水下结构检测的ROV研制问题的标准分析[J].中国标准化,2016(24):201.
[5]马贺.水下机器人在警务工作中的应用[J].中国安全防范技术与应用,2018(5):28-31.
