基于模糊聚类的舰载机超视距空战火力分配模型
2021-06-15牛庆功
吴 铭,牛庆功,张 毅
(海军航空大学,山东 烟台 264001)
舰载机超视距协同空战是重要的空中作战样式。在精确引导的情况下,舰载机能快速接收目标指标进行火力打击[1],自主完成火力打击。但是,在概略引导条件下,就需要舰载机自行搜索目标构建优势空战态势,遂行交战[2]。研究表明[3-5],优势空战态势的构建需要考量交战双方战机的距离度量、角度度量以及舰载机武器装备性能度量,一旦优势空战态势构建完成就可以组织火力攻击。因此在满足空战态势的基础上,快速合理地进行目标火力分配是目前多机协同交战、火力规划研究的重点与难点。
1 舰载机超视距攻击作战规则描述
舰载机空战中的交战规则是根据武器装备性能结合作战任务而制定的使用条件和决策方法。
1)超视距空空导弹发射规则
① 我机火控雷达已经锁定敌机,超视距空空导弹已准备好;
② 目标处于我可攻击区内,目标机动过载不超过限制条件;
③ 发射导弹时载机姿态稳定,指向敌机的角度不超过导弹发射离轴角,速度、高度和载机过载都必须满足条件;
④ 当前没有其他导弹攻击敌机;
⑤ 当前没有导弹攻击我机。
2)发射超视距空空导弹后的脱离规则
① 若超视距空空导弹采用复合制导模式,则发射后机载雷达应稳定跟踪目标,以保证载机向导弹继续提供无线电修正信息,协助导弹导引头截获目标。此时,如果判断载机安全没有受到威胁,则载机应尽量晚脱离。当载机安全受到威胁,则应采取逃逸措施。
② 若超视距空空导弹发射距离在敌方导弹射程之内,导弹发射后载机即可脱离。
③ 载机脱离时,发射导弹后采用减速机动,后选择安全航线,在背离敌机的方向上,采用水平加力转弯或高速俯冲脱离[6]。
3)超视距空空导弹的使用与管理规则
① 同一时间只能使用一枚超视距空空导弹,但可以连续使用(间隔2 s);
② 计算瞄准所需时间,忽略超视距空空导弹准备时间;
③ 相应导弹发射后即从武器链表中删除。
4)超视距空战效能评估规则
① 判断敌机状态,如果敌机返回或者被其他的导弹击毁,则导弹自动爆炸,我机下一步改变攻击目标,否则继续;
② 判断敌机和导弹的距离是否在导弹的爆炸威力范围内,如果满足条件,视为导弹击中敌机,我机下一步改变攻击目标,否则继续;
③ 判断导弹的飞行时间是否在允许的最大飞行时间内,是则导弹继续向敌机飞行,否则导弹自毁,攻击失败;
④ 敌机已全部被击落,威胁消除;
⑤ 敌机部分被击落,其他已转入撤退,脱离战斗,威胁消除。
在舰载机空战过程中,所有处于作战空域执行空战任务的飞机接收预警引导信息。作战飞机根据所接收的指挥引导信息,进行目标搜索、截获与跟踪,判断是否满足超视距作战条件,若满足条件即进行超视距攻击;若满足近距空战条件,则直接进入近距空战。超视距攻击完毕后,进行空战效果评估。若敌威胁未消除,且满足近距空战条件,转入近距空战;若敌威胁消除,空战任务结束。近距攻击完毕后,进行近距空战战效评估,敌威胁消除,空战任务结束。
2 超视距协同交战火力分配模型算法
2.1 优势空战态势的构建
空战态势是指舰载机在交战中所处的交战状态,在信息共享模式下,舰载机编队都能感知整体态势,对空战目标的攻击性质达成共识,存在一种默契,使得有关目标的航迹信息都能通过电子形式实现共享[7]。在态势感知的基础上,优势空战态势由距离和角度两部分构成,是飞行员判断能否进行空战的基本条件,具体如下。
1)角度优势
为了保持对敌机的占位优势,在满足舰载机超视距空空导弹发射规则的基础上需要构建敌我双方交战的优势占位角,如图1所示。

图1 角度优势示意图
根据角度优势示意图,构造角度优势函数:
(1)
其中,ψt为敌机进入角,ψa为我机方位角。
式中,Sa的取值反映出角度优势度量,有三种情况:①当ψt=180且ψa=0时,Sa=1,达到最大值;②当ψt=ψa=0时,Sa=0;③当ψt=0且ψa=180时,Sa=-1,达到最小值,具体取值根据实际情况计算获得。
2)距离优势
距离优势是一个相对优势,取决于交战飞机挂载空空导弹射程的因素,在先敌发现的情况下,交战距离越远对自身安全越有利。R为两机之间的距离,则空空导弹的攻击距离应满足:
Rmin≤R≤Rmax
(2)
其中,Rmin为导弹杀伤区的近界,Rmax为导弹杀伤区的远界。
2.2 火力分配模型
舰载机协同空战中涉及敌我双方兵力数量规模较多,在构建模型的时候主要考虑空战敌我兵力情况,对空空导弹使用时必须满足其使用与管理规则,对于海上兵力的作战情况暂不考虑。
令T={T1,T2,…,TM}为敌方空战飞机的序列集合,M表示敌方空战目标的数量。
G={G1,G1,…,GN}为我方舰载机的序列集合,N表示我方空战舰载机数量。

每个机群的集合都涵盖了所涉及的空战目标,由于相互独立存在,认为所有目标互不相容,则Pi应满足:

(3)


(4)
其中,Ri为Tj与Tk相对Gi的角距函数,ri为交战攻击角的极限值。
根据舰载机交战过程,在满足优势态势的基础上即可实施超视距攻击。假设舰载机可攻击的目标数量为m,每个目标在满足导弹发射条件下都可以被攻击,则导弹的火力分配函数为
X=(xij)k×m
(5)
其中,xij表示分配给第j个目标的第i类空空导弹的数量。
则第i类导弹毁伤第j个目标的概率为
gij=1-(1-pij)xij
(6)
其中,pij表示第i枚导弹对第j个目标的毁伤概率。
根据毁伤累计原则,当k组所有导弹对第j个目标进行导弹攻击时,其毁伤概率为

(7)
构造火力分配模型如下:

(8)
约束条件为
(9)
且xij∈I
其中,I表示整数集,ωj表示目标重要性系数。
2.3 基于模糊聚类的目标函数处理方法
聚类分析通过数据对象和种类之间距离表征相似度,通过聚类形成过程中的调整策略和聚类结束所需满足的条件,建立度量距离[9],内容如下。
将空战目标信息进行格式化处理,令R={r1,r2,…,rn},其中ri表示空战目标的属性,包括目标性质、航速、航向、武备等属性。由于目标属性的量纲不同,需要对目标信息进行标准化处理:

(10)

经过标准化处理后的信息属性再进行归一化处理:
(11)
根据专家评估的衡量标准,可定义相对威胁度量标准为
G=(g1,g2,…,gm)T
(12)

假定前t(t=1,2,…,m)个属性的权重是不确定的,而后m-t个属性的权重是确定的,即
(13)

(14)
对式(14)求解,可以得出目标威胁度量的权重值。在实战中,指挥员的作战经验和知识的偏好信息对目标威胁的判断会出现不同的结果,所以该目标函数是一个实时动态更新的过程。
2.4 算法流程
根据上述模型和作战规则的描述建立舰载机超视距交战火力分配模型算法流程如下[10]。
Step1:构建模型的初始解M1,M1满足:

2) 对∀Twi∈T(t′)-Tnew∪Timpact,令Mcurrent=M1。
空空导弹火力分配后,可以得出该阶段确定的全局决策矩阵Mcurrent=|Mi,1,Mi,2,…,Mi,j|。根据全局决策矩阵Mcurrent与目标重要性系数ωj,求得舰载机超视距交战火力分配的数学期望:
(15)
3 仿真计算
3.1 仿真参数设定
假设敌方有2批次6架战斗机从两个方向对我海上编队进行攻击,我方舰载机接到命令在预警兵力的引导下挂载空空导弹对敌方空战飞机实施超视距导弹攻击,敌方战斗机编队分两个方向进行空战,其作战态势参数如表1所示。
表1 敌方战斗机作战态势参数
表1 我方战斗机作战态势参数
假设我方出动1批6架舰载机进行超视距拦截,其作战性能参数如表2所示。
根据舰载机超视距交战火力分配模型算法流程和威胁判断算法,确定敌战斗机编队的威胁度量w,结合想定作战态势中敌战斗机的进入角和方位角计算得出我机对敌机的角度优势度量,如表3所示。
表3 目标威胁度量和角度优势度量
3.2 仿真结果分析
仿真根据舰载机超视距空战火力分配的算法流程,结合式(15)的动态分配模型,对2批6架敌战斗机进行空舰导弹作战资源动态分配,求得Mcurrent的最优解如表4所示。
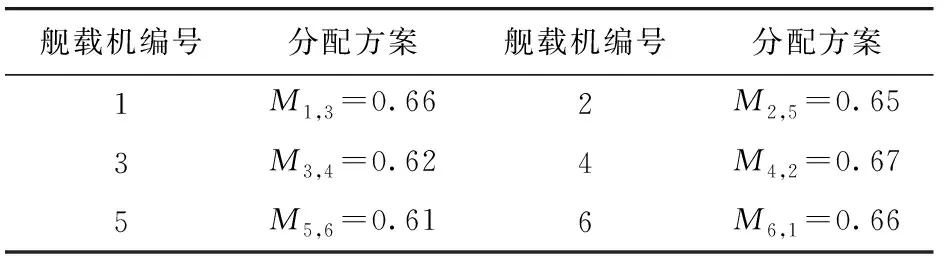
表4 舰载机协同交战火力分配方案
在最优分配方案下,根据式(15)可得舰艇编队防空作战最大数学期望值为2.640 9,可最大限度地发挥舰载机超视距空战作战资源。
4 结束语
本文针对舰载机超视距协同交战火力分配优化问题,提出了一种动态分配算法。该算法能够在多对多空战态势中合理分配火力资源,最大限度地发挥舰载机空战整体作战效能。但是舰载机空战作战效能的提升除了取决于装备的先进性外,还取决于作战指挥模式和编队协同模式的科学性。研究表明,舰载机协同交战通过滚动时域来响应环境的变化,能有效解决舰载机空战在线任务规划难题。但是,本文所提出的模型算法还有需要完善的地方。如何进一步考虑海空同时交战中的目标打击问题,优化威胁度量的主观偏差是下一步需解决的问题。
