基于相位相关的全景图像拼接技术
2021-06-03任智姣
任智姣
(山西工程职业学院 山西 太原 030009)
1 引言
全景视图方法是基于图像绘制的关键技术,已被推广应用于虚拟现实领域以及计算机视觉领域。在全景图像拼接中,首先拍摄获得图像序列,然后直接进行柱面投影变换,即可获得统一柱面空间图像序列,再进行图像拼接处理,即可形成全景图像。在图像拼接中,可利用两幅图像重叠区的相似性实现,通过应用基于特征的算法,并利用寻找局部对应以及抽取重要特征方式进行匹配,即可得出局部最优解。
2 全景图概述
全景图技术指的是利用图像处理技术所形成的全景图像,能够重现观察者环视一周时所观看到的场景。在全景图像获取方面,主要有两种方式:第一,采用全景照相机拍摄,即可自动化形成全景图,操作方式便捷,但是设备购置成本比较高。第二,采用普通数码照相机拍摄序列照片,再利用图像拼接方式获得全景图像。在全景图像拼接过程中,要求保证透视效果,柱面全景图像的数据存储结构简单,因此,一般可拼接柱面全景图像。
在全景图像的形成过程中,要求对图像间的三维旋转量以及单位性矩阵进行计算,为了简化求解过程,可对相机运动进行限制,在拍摄过程中,使得相机镜头能够在水平方向绕光心进行旋转。图像间需围绕y轴旋转角度,无需在垂直方向倾斜,另外,对于图像重叠部分,可映射至统一约束空间,对相邻图像之间两个方向的位移量进行计算,即可对图像进行对准以及整合处理,再经过柱面投影,即可形成全景图像[1]。
3 图像采集技术
现如今,全景图像拼接算法逐渐增多,可对特定图像进行拼接处理。在全景图像拼接中,首先需获取图像,在利用相机进行拍摄时,应注意以下拍摄技巧。
(1)使用三脚架固定相机,再按照一定角度旋转拍摄。首先将三脚架固定在某个位置,然后再将相机按照一定角度旋转和拍摄,通过应用这一拍摄方式,无需使用较多相机参数。在理想状态下,无需将相机沿光轴旋转,由于相机旋转角度比较小,因此所能够拍摄的两幅图像之间重叠区比较大,便于全景图像拼接。在这一拍摄方法的实际应用中,所获得的图像不是出于同一平面的图像序列,在全景图像拼接过程中,需将拍摄到的图像投影至同一个平面,然后再进行拼接,一般可应用柱面全景图拼接方式。
(2)手持相机拍摄图像。在这一拍摄方式中,拍摄者手持相机,站立在固定点,然后旋转对四周拍摄,是全景图拼接中比较常用的图像获取方式。在这一拍摄方式的实际应用中也存在一定的弊端,即容易受到外界环境因素影响,相机运动过程比较复杂,为了保证图像获取质量,应尽量减小相机旋转角度,扩大相邻图像重叠区面积。另外,在该拍摄方式的实际应用中,相机焦距以及场景物体均处于不断变化中,并且容易受到光照因素影响,因此很难保证图像质量[2]。
4 柱面投影技术
在柱面全景图的拼接过程中,通过拍摄获得原始图像序列后,如果直接拼接,可能无法保证场景拼接效果的一致性,同时很难对场景中各个对象之间的几何关系进行控制。对此,为了保证场景中空间约束关系,在拍摄获得原始图像序列后,需将其映射至标准投影中,即柱面投影,即可获得柱面图像序列,在此基础上进行拼接,即可形成完整的柱面全景图。
在柱面投影变换过程中,需根据投影变换公式进行计算,假设照相机在x-z平面运动,光轴和图像平面之间的交点即图像中心点,如图1中(a)所示。原始图像、投影柱面图像以及柱面分别为I、J、K,原点即为观察点O。为了确定O点观察图像I在柱面K上的投影影像,设定柱面半径为r,投影角度为θ,图像宽度和高度分别为W、H。柱面图像宽度计算公式为,其中,高度为H。对于图像像素坐标,可以对像素在图像上的位置进行定义,对于左上角像素,可作为原点。
在图像I中,设任意一点P,图像上P点的坐标可采用(x, y)表示,对柱面图像J上P点所对应的Q点。在图像J上,Q点的坐标为(x′,y′),在x-z平面以及y-z平面上,点P如图1中(b)和(c)所示,即可确定柱面投影变换公式:,在上述公式中,
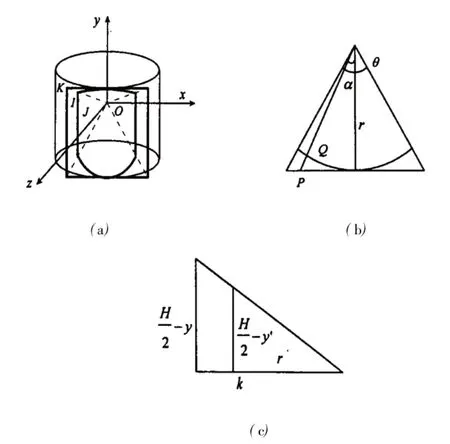
图1 柱面投影变换
在图1(b)中,θ角和拍摄焦距密切相关,全景图角度为360°,可确定各个图像中所对应的角度,θ角的计算公式如下:

5 图像拼合技术
5.1 重叠图像拼接。在全景图像拼接中,在相位相关法的实际应用中,在纯二维平移情况下,拼接精度能够达到1个像素,主要被应用于航空照片拼接以及卫星遥感图像配准中。在本次研究中,在获得原始图像序列后,再经柱面投影处理后,即可获得柱面图像序列,只可发生相对平移,因此,可应用于全景图像拼接中[3]。
相位相关法的应用原理为傅里叶变换,对于两幅数字图像g1、g2, G1、G2,可用于表示图像的傅里叶变换,计算公式如下:,i∈[1,2]。对于频域中两幅图像的相位差,可根据以下公式进行计算:

假设,在图像g1与图像g2之间,间距一个平移量L,则对于两幅图像之间的公式,可根据以下公式进行计算:

对于公式(2),可进行傅立叶变换,获得以下公式:

通过对公式(1)和公式(3)进行分析,每一空间频率f有:

对于公式(4),进行傅立叶逆变换处理,即可获得公式(5)。

通过对公式(2)进行分析,在两幅图像的配准点上,有一δ函数,其余部分为零。根据公式(5),即可对d(r)进行计算,在确定d(r)最大值后,对于其所对应的像素点,即可作为配准点。
5.2 图像融合。在图像序列拼接完成后,相邻图像亮度不同,如果直接将图像进行叠加处理,则拼接位置的拼接缝比较明显。对此,对于图像重叠区,可将其像素按一定权值相加,即可获得新的拼接图像,在图像拼接完成后,对图像错开部分进行裁剪,对于重叠图像部分像素值,可根据以下公式计算:;在上述公式中,I3指的是融合后图像中对应像素的像素值I1和I2相邻两幅图像重叠区域中相对应像素点的像素值,W1和W2分别指的是该像素在各自图像上的权值,其取值范围为[0,1]。通过图像融合处理,能够保证相邻图像之间能够平滑过渡,提高图像拼接质量。
6 总结
综上所述,本文采用相位相关法进行全景图像拼接,在图像拼接中应用快速傅里叶变化方式,同时采用频域相位信息进行图像拼接,计算量与图像尺寸大小密切相关,能够避免图像拍摄中光照变化、镜头几何畸变对图像拼接质量造成不良影响。通过采用相位相关法进行全景图拼接,能够有效提高拼接速度,保证拼接质量。
