基于ATmega128 控制的管道钢珠测量设计
2021-05-28魏孔贞孙红英
魏孔贞 孙红英 李 泉
(兰州石化职业技术学院 电子电气工程学院,甘肃 兰州730060)
1 概述
本设计来源于全国大学生电子设计竞赛,通过一个管道A、B 两端任意位置进行释放小球,AB 两端的距离任意,要能够测量出释放小球的个数、管道的倾斜角度、小球的运动方向以及小球在管道内摆动的周期或者频率。设计的关键是传感器的选择与信号的接收,系统内部的控制算法和显示,难点在于脉冲信号的获取和小球初始速度的影响。
2 系统总体设计
2.1 系统设计要求
设计并制作一个管道内钢珠运动测量装置,使用2 个非接触传感器检测钢珠运动,传感器1 和传感器2 之间的距离任意,配合信号处理和显示电路获得钢珠的运动参数。倾斜角为0o~800之间的某一角度,由A 端放入1 粒钢珠,要求装置能够显示倾斜角的角度值,测量误差的绝对值≤30。
2.2 方案论证
2.2.1 控制器选择
方案一: STC89C51RC 是采用8051 核的ISP 在系统可编程芯片,工作时钟频率高,内存小、保护能力差,功耗较高,运行速度慢,单片机内集成资源少[1]。方案二: AVR ATmega128 单片机,运行时钟高,外围电路简单,硬件设计方便,资源丰富,可以满足本设计的要求。通过比较,综合考虑认为在满足功能要求的前提下使用AVR ATmega128 单片机,运行速度较快,资源较多。
2.2.2 传感器选择
电感线圈式金属探测器是由高频振荡器、震荡检测器、音频振荡器和功率放大器组成,与传统探测器相比:探测器工作面的特殊设计,探测面积大、扫描速度快、灵敏度极高。其缺点是要进行复杂的滤波算法,信号检测不稳定。电感式接近开关作为钢珠检测传感器,其优点为输出的信号是数字方波,信号稳定,便于检测与计算最终根据实际情况,选择传感器采用TLQ5MC-7 方柱型直流三线式金属接近开关。
3 系统理论分析与计算
3.1 数学模型
必须通过检测钢珠运动,利用时间和距离的关系,根据牛顿运动定律来计算管道的倾斜角α[2]。根据牛顿第三定律,F=ma,小球受力分析如图1 所示,则小球的加速度a 与管道倾角α 的关系f=mgsinα。

图1 小球运动示意图

3.2 小球加速度a 的测量
3.2.1 针对本题目,传感器安装位置不定,投放小球的“手法”不同,初速度v0难以确定。
3.2.2 必须测量两组距离及对应时间联立方程,“消除”v0,求得加速度a。
解得

4 系统硬件、软件设计
4.1 系统总体设计
选择AVR ATmega128 单片机作为主控器,并通过角度传感器和金属接近开关与LCD 液晶进行实时显示数据。AVR ATmega128 单片机具有高可靠性、功能强、高速度、低功耗、低价格等优点。AVR 单片机废除机器周期,采用RISC,以字为指令长度单位,取指周期短,可预取指令,实现流水作业,可高速执行指令。有高可靠性为后盾[3]。AVR 单片机在软/硬件开销、速度、性能和成本多方面取得优化平衡,是高性价比的单片机。内嵌高质量的Flash 程序存储器,擦写方便,支持ISP 和IAP,便于产品的调试、开发、生产、更新。AVR ATmega128 单片机定时器(4个)工作模式多(定时、计数、PWM、捕捉等)、丰富的中断资源(35 个)完全可以满足系统要求,系统硬件总体框图如图2 所示。
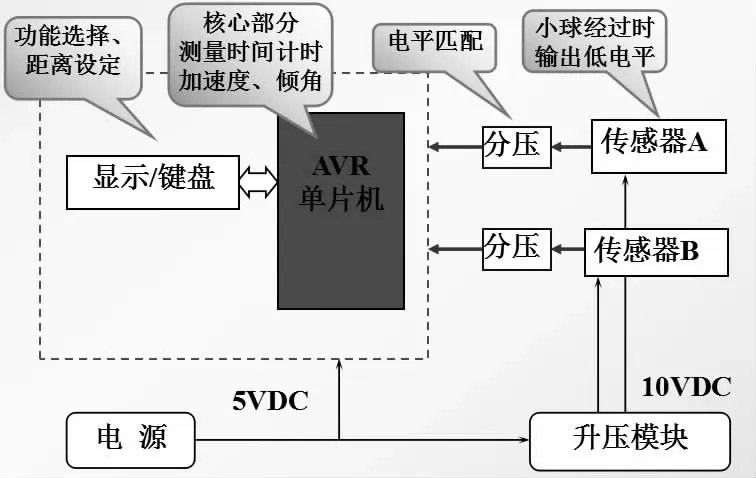
图2
4.2 电路设计
根据控制要求,设计电路主要包括初速度调节模块,功能选择与距离设定模块、时间测量加速度和倾斜角计算模块、传感器信号检测模块、电平匹配模块、升压模块等。
4.3 软件设计
充分利用单片机内部的硬件资源:定时器、各种中断,以提高测量装置的实时性目的提高测量精度。设计主要内容计算加速度、倾角:
4.3.1 脉冲信号分析
小球经过传感器时的脉冲信号,及变量的约定:传感器未检测到金属,输出高电平,传感器检测到金属,灯亮,输出低电平。
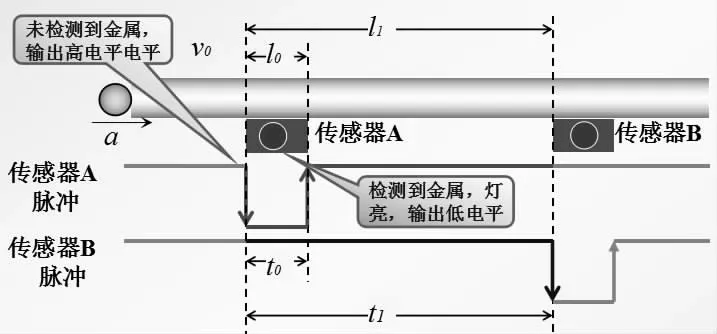
图3
L0不是传感器的宽度,它与小球的尺寸、传感器的灵敏度、感应面积、响应速度、安装距离位置有关,(具体制作的装置取值是12.6mm), L1为任意距离,可以根据实际要求固定为20mm。
4.3.2 时间的“获取”(送到单片机)
传感器A(B)脉冲由PE7(PE6)传至AVR ATmega128 单片机引脚INT7/ICP3(INT6/T3),传感器脉冲功能下降沿中断、上升沿捕捉、下降沿中断[4]。第一次下降沿中断定时器清零TCNT3=0,上升沿捕捉定时器ICR=TCNT3, 第二次下降沿读取定时器TCNT3。
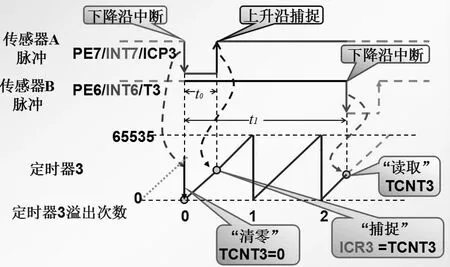
图4
4.3.3 调试与测试
根据要求进行了不同角度的调试,除80°效果不太理想,其它都接近控制要求。分析其原因就是当角度接近90°的时候,小球不再沿管壁运动,与管材内壁的平整、投放小球的“手法”影响了小球的运动,这样小球经过传感器时“距离”会有微小的变化,导致距离发生变化。一个原因是当角度接近90°时,α 对加速度“很敏感”。另一原因就是对时间本身就很敏感,a 对t 偏微分将出现t 的4 次方。如果要解决这个问题就需要选择高灵敏度的传感器。
结束语
本系统设计利用单片机和传感器,对管道内钢珠运动进行了个数、运动的方向,距离的测量和计算,根据不同的初速度和角度,通过单片机快速计算和中断能力,最终实现了控制要求,较好的完成了控制要求,为我们以后测量提供了新的方法和新的思路。
