基于TRIZ的秸秆皮穰分离机概念设计
2021-05-27井永晋李荣峰
付 敏,井永晋,李荣峰,李 萌
(东北林业大学 机电工程学院,黑龙江 哈尔滨150040)
0 引言
农作物秸秆由皮、穰和叶构成。秸秆皮的主要成份是纤维素和木质素,可作为造纸、人造板的原材料,秸秆穰和叶含有丰富的粗蛋白、粗脂肪、糖和半纤维素等,生物降解性能优良,可作为饲料原料,还可用于生产生物乙醇、沼气等生物质能源。秸秆皮、穰、叶分离后能够各施其长,实现高价值精细化利用[1],[2]。
我国科研人员对秸秆皮穰分离开展了相关研究。张洪建[3]设计的玉米秸秆皮、穰、叶分离机采用除叶齿板对秸秆叶进行打击、梳刷、搓擦,除叶后的茎秆被剖切,再由分展器展开进行剥穰处理。任德志[4],[5]研制的玉米秸秆皮穰分离机采用除叶机除叶,通过碾压秸秆弹塑变形后由辊齿揭开秸秆外皮,再经剪切机构切段后由分离机实现皮穰分离。李平凡[6]通过搓擦去除秸秆叶,通过劈展刮削的方式去除秸秆穰。刘一清[7]采用持续碾压和揉搓方式将秸秆叶和穰碾碎去除,保留秸秆皮。周景辉[8]通过送料-劈开-展平-分刀轴出穰等工序完成秸秆去皮。李利桥[9]采用剖穰和碾压后风选的方式实现了秸秆皮穰分离。
目前,秸秆高品质精细化利用的市场需求已经显现,但现有设备的生产能力、分离效率和性能水平还有待提高,亟需开展相关设备的设计研究。本文以提高秸秆皮穰分离效率、实现皮、穰、叶的分类收集且不破坏秸秆强度为目标,基于发明问题解决理论(TRIZ)进行秸秆皮穰分离机设计,提出了去除秸秆叶-切开秸秆皮-刮除秸秆穰-分类收集的作业方式,并应用TRIZ工具分别对喂入机构、除叶机构、定位机构、切割结构、夹持机构、去穰机构和收集机构进行创新设计。
1 TRIZ简介
TRIZ是前苏联发明家根里奇·阿奇舒勒(G S Altshuller)建立的系统化创新方法[10]。TRIZ包含了一整套用于分析问题、解决问题的工具,可以帮助研发人员突破思维定势,从不同维度触发灵感,超越自我认知和物理界限,在更广阔的领域寻找解决方案。应用TRIZ可以克服传统经验、类比设计的局限,通过系统化、结构化、简单化的TRIZ工具辅助设计,获得高质量、多层次的创新方案集;TRIZ是创新指南针,沿着TRIZ指引的路径,可以大大缩短研发周期,减少无效劳动和资源消耗 [11]。
TRIZ的理论体系可分为5大模块(图1):突破惯性思维的方法、分析问题的工具体系、解决问题的工具体系、技术系统进化法则以及发明问题解决算法ARIZ[12]。
2 秸秆皮穰分离机功能需求分析及工艺流程确定
2.1 秸秆皮穰分离机功能需求分析
总功能:分离秸秆皮和秸秆穰。

图1 TRIZ的理论体系Fig.1 Theoretical system of TRIZ
子功能:输送秸秆、去除秸秆叶、定位无叶秸秆、切割无叶秸秆、夹持无叶秸秆、刮除秸秆穰、分离收集皮、穰、叶。
秸秆皮穰分离机须要实现秸秆皮、穰、叶的分离和分类收集的功能。将秸秆喂入装置后先将秸秆叶去除,之后剖切秸秆皮、刮除秸秆穰并分类收集;为实现精准作业,还须要定位和夹持秸秆功能。
2.2 秸秆皮穰分离工艺流程
基于功能需求分析确定秸秆皮穰分离作业的工艺流程如图2所示。

图2 秸秆皮穰分离工艺流程Fig.2 Process for stalk bark-flesh separation
将原料秸秆喂入装置后,先去除秸秆外叶,之后对无叶秸秆进行定位、切割,再通过夹持机构移动秸秆至去穰机构实现秸秆皮、穰分离,最后对分离的秸秆皮、穰、叶分类收集。
本文将应用TRIZ工具针对工艺流程中涉及的喂入机构、除叶机构、定位机构、切割结构、夹持机构、去穰机构和收集机构进行创新设计。
3 基于TRIZ的秸秆皮穰分离机概念设计
3.1 原型系统工作原理及存在的问题
经文献调研,选择专利“玉米秸秆皮穰叶分离装置”[13]为参考原型系统(图3),其工作原理:喂入台将秸秆喂入碾压喂入辊进行碾压,在挡料板的引导作用下进入除叶盘进行除叶,无叶秸秆再经碾压夹持辊进一步碾压,使秸秆皮与秸秆穰的结合状态遭到破坏,划皮辊将发生变形的秸秆划成条状,再由切割辊将条状秸秆进行剪切,最后使用风机将混合物进行分离。但是,碾压作业会降低秸秆皮的强度,不利于后续利用,而且秸秆皮穰未分类收集,须增加分离工序。

图3 原型系统结构示意图Fig.3 Schematic diagram of the prototype system
3.2 喂入机构设计
喂入机构的作用是将秸秆原料有序送入装置内,以便后续作业。
3.2.1 应用TRIZ的IFR分析求解
最终理想解IFR(Ideal Final Result)是TRIZ中通过突破思维惯性进而解决问题的工具,本文中IFR的解题流程如下所示。
①设计的最终目标是什么?秸秆全部输送至除叶装置内。
②IFR是什么?秸秆自己移动到除叶装置内。
③达到IFR的障碍是什么?秸秆自身不具备移动能力。
④出现这种障碍的原因是什么?秸秆自重轻,缺乏移动力。
⑤不出现这种障碍的条件是什么?秸秆自身具有向前移动的初速度。
⑥创造这些条件,有哪些可利用的资源?可用资源分析见表1。
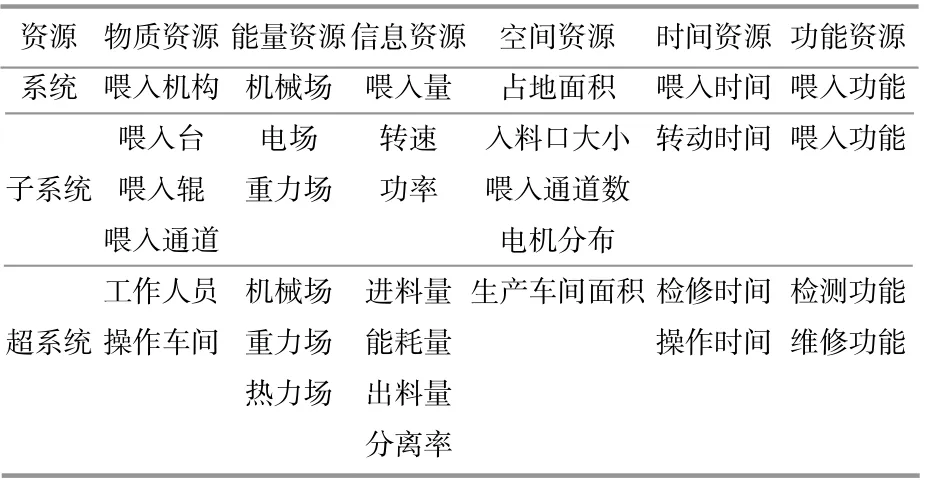
表1 资源分析表Table 1 Resource analysis list
由子系统物质资源“喂入辊”提出概念解1:在喂入辊上设计螺旋凸起,可以对秸秆起到一定的导向作用,还可以增大秸秆与喂入辊之间的摩擦力,防止秸秆打滑。
由子系统的空间资源“入料口大小”提出概念解2:在喂入台设置推动架,当遇到较大尺寸秸秆时,可以通过推动架将秸秆推入机器内。
由子系统的物质资源“喂入通道”提出概念解3:采用8条喂入通道的方式进行秸秆的喂入,通过提高喂入秸秆数量来提高装置的工作效率。
3.2.2 喂入机构组成及工作原理
图4为喂入机构示意图。从图4可以看出,喂入机构由喂入台1、电机2、联轴器3、推动架4、喂入通道5和喂入辊6等组成,喂入辊位于八条喂入通道的下方。将秸秆原料放置在喂入平台上,由旋转的喂入辊带动秸秆沿着喂入通道进入装置内。当秸秆截面较大时,通过机架侧面的推动架将大截面秸秆推入机器内。

图4 喂入机构示意图Fig.4 Schematic diagram of feedingmechanism
3.3 除叶机构设计
除叶机构的作用是去除秸秆叶子,以利于秸秆皮、穰、叶的分类收集。原型系统的除叶机构采用传动轴带动除叶盘等速同向旋转,通过摩擦秸秆叶达到去除外叶的目的,但存在茎、叶分离不够彻底、分离效率低的问题。
3.3.1 应用TRIZ的功能分析与物场模型求解
①技术系统名称:除叶机构。
②主要功能:去除秸秆叶。
③功能客体(系统作用对象):秸秆叶。
④系统组件:除叶盘、机架、传动轴、电机;超系统组件:秸秆。
⑤建立功能模型(图5)。

图5 除叶盘功能模型图Fig.5 Function Model of the leaf removal disc
⑥构建问题物场模型。
由图5构建如图6所示的问题物场模型,即除叶盘对秸秆叶的摩擦去除作用不足。
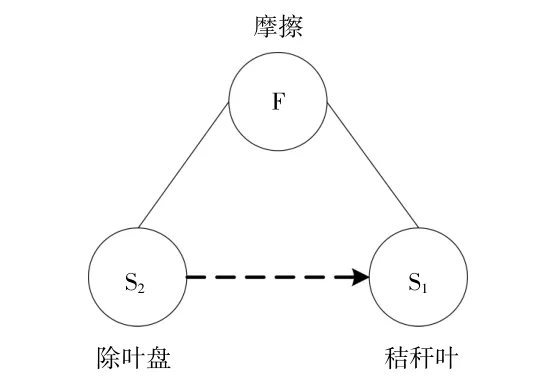
图6 除叶盘问题物场模型图Fig.6 Substance-field model of the leaf removal disc problem
⑦求解物场模型。
由TRIZ标准解S2.2.1 -用更可控的物场来增强问题物场模型中的有益摩擦作用,得到如图7(a)所示的求解模型,提出概念解4:通过上、下两个反向电机改变除叶盘的转动方向以实现等速反向旋转,形成线速差提高除叶效率。由TRIZ标准解S2.1.1-链式物场模型增强有益摩擦作用,得到如图7(b)所示的求解模型,提出概念解5:通过在除叶盘上安装摩擦块,可增强对秸秆的摩擦力。

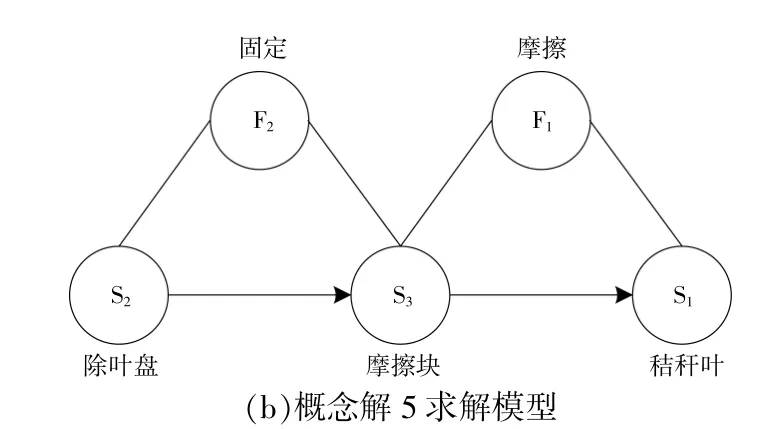
图7 除叶盘物场模型求解图Fig.7 Substance-fieldmodelof the leaf removal disc solving
3.3.2 除叶机构组成及工作原理
除叶机构如图8所示。从图8可以看出,除叶机构由除叶盘1、摩擦块2、上除叶盘电机3、万向联轴器4、上传动轴5、下传动轴6和下传动电机7等组成。每组除叶组件包括两个上、下布置的除叶盘,除叶盘上通过螺钉连接有6个摩擦块,便于拆卸和更换。上传动电机通过万向联轴器带动上传动轴顺时针旋转,下传动电机带动下传动轴逆时针旋转,从而使得上、下除叶盘等速反向旋转。秸秆由喂入辊带动并通过喂入通道进入除叶盘内,在摩擦力作用下将秸秆叶撕扯剥离。

图8 除叶机构结构示意图Fig.8 Schematic diagram of the leaf removingmechanism
3.4 定位机构设计
定位机构的作用是固定秸秆的位置,以便后续精准地切割秸秆。原型系统采用导向板实现秸秆定位,定位精准度有待提高。
3.4.1 应用TRIZ的物场分析求解
问题物场模型见图9(a),即导向板对秸秆的引导作用不足。应用TRIZ标准解S2.1.1-链式物场模型来增强对无叶秸秆的引导作用,解决方案模型见图9(b),由此提出概念解6:由托辊与开有V型槽的定位辊配合实现对无叶秸秆的定位。

图9 定位机构的物场模型Fig.9 Substance-fieldmodelof the positioningmechanism
3.4.2 定位机构组成及工作原理
图10为定位机构的示意图。从图10可以看出,定位机构由定位辊1、定位盘2和定位托辊3组成。定位辊上有8个V型槽结构的定位盘,定位盘与下方托辊形成的封闭空间可容纳一根秸秆,对每根秸秆起定位和支撑作用;定位托辊上设置有横向槽,以增大摩擦力,更有利于秸秆的输送。在托辊转动作用下将无叶秸秆送入后续的切割机构中。
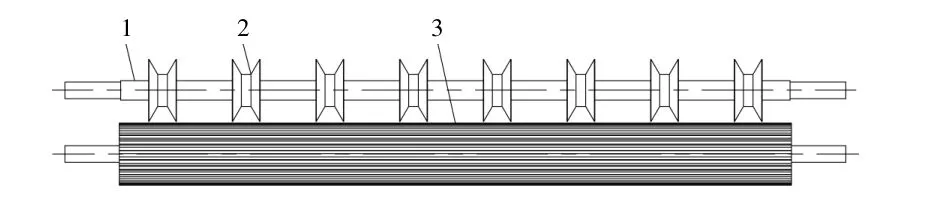
图10 定位机构结构示意图Fig.10 Schematic diagram of positioningmechanism
3.5 切割机构设计
切割机构的作用是沿着秸秆轴长方向将秸秆剖切开,以便于后续的刮除秸秆穰作业。
3.5.1 应用TRIZ发明原理求解
基于NO.5组合原理提出概念解7:将圆周回转式刀片通过螺钉连接安装在刀座上,切割辊不仅能提供旋转的切力也能够增大纵向压力增强切割效果。
3.5.2 切割机构组成及工作原理
图11为切割机构的示意图。从图11可以看出,切割机构由切割托辊1、切割辊2、切割盘3、圆周回转式刀片4和连接螺钉5等组成。无叶秸秆进入定位机构后,由切割辊带动8组切刀将秸秆沿着轴长方向剖切为两半。
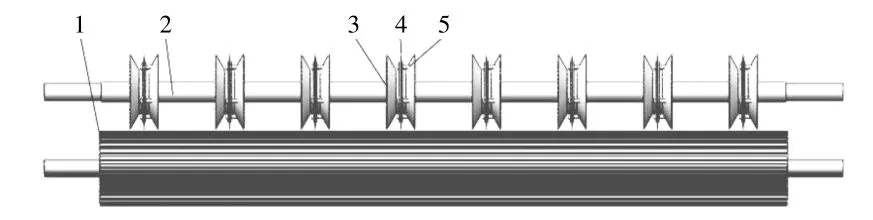
图11 切割机构示意图Fig.11 Schematic diagram of cuttingmechanism
3.6 夹持机构设计
夹持机构的作用是夹持、移动秸秆。原型系统通过碾压夹持辊在秸秆两侧产生的挤压力来实现对秸秆的夹持,但存在秸秆茎的强度遭到破坏的问题。
3.6.1 应用TRIZ的功能分析
图12为原型系统夹持机构的功能模型。原型系统夹持机构存在的主要功能缺陷是:碾压夹持辊夹持力不足;秸秆对碾压夹持辊的有害磨损作用;碾压夹持辊对机架的有害振动作用。
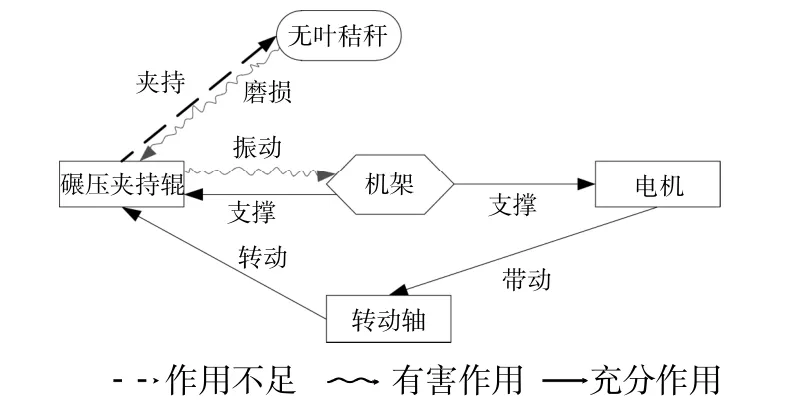
图12 碾压夹持辊功能模型Fig.12 Functionmodel of the rolling nip roller
3.6.2 应用TRIZ功能裁剪求解
选择裁剪组件:碾压夹持辊。
裁剪依据:碾压夹持辊对机架存在有害的振动作用。
分析其有用功能:夹持无叶秸秆。
应用裁剪规则四“裁剪组件的有用功能由系统外的组件替代完成”[14],提出概念解8:采用机械手对无叶秸秆进行夹持,避免因秸秆直径尺寸不同而产生的夹持不牢固问题,提高了夹持装置的适应性和稳定性,同时爪壁采用橡胶材料,提高了接触面的摩擦系数。
3.6.3 应用TRIZ进化法则求解
TRIZ动态性进化法则指出,技术系统的进化应该沿着结构柔性、可移动性和可控性增加的方向发展,以适应环境状况或执行方式的变化[10]。
为提高夹持机构的可控性,提出概念解9:通过安装红外感应器,利用光线折射原理实现对秸秆的抓取、移动等动作的自动控制。
为提高夹持机构的可移动性,提出概念解10:通过电机带动齿轮和齿条来实现夹持机构的前、后直线运动,再通过连杆机构实现机械手的上、下运动。
3.6.4 夹持机构组成及工作原理
图13为夹持机构的示意图。从图13可以看出,8个夹持装置沿机架的宽度方向并列设置,各夹持装置中心线与定位机构辊槽中心线、切割机构辊槽中心线保持一致,以保证秸秆沿机架长度方向的位置不发生偏移。红外感应器检测到秸秆从切割机构中移动出来,发出指令控制机械手向下伸长抓取夹持秸秆,继而在齿轮和齿条的带动下向前运动,与后续去穰工序相配合去除秸秆穰。
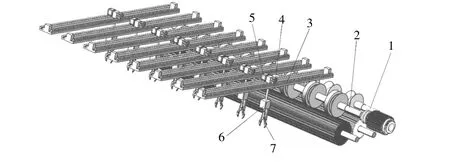
图13 夹持机构示意图Fig.13 Schematic diagram of clampingmechanism
3.7 去穰机构设计
去穰机构的作用是去除秸秆穰,进而实现秸秆皮穰分离。原型系统中无单独的秸秆去穰机构,本文应用TRIZ的功能导向搜索求解可行的工作原理。
3.7.1 应用功能导向搜索求解
功能导向搜索(Function-Oriented Search,FOS)的主要思想是以技术系统实现的功能为目标,借鉴其它领域功能类似系统的解决方案来解决问题[15]。
①定义关键问题:须要将秸秆皮穰进行分离,但没有适合的工具来提高分离效率。
②阐述改善功能:提高秸秆皮穰分离效率。
③确定所需参数:秸秆处理量为2 t/h,秸秆皮穰分离率大于95%。
④泛化功能:分离秸秆皮和穰。
⑤寻找领先领域:西瓜、火龙果等水果在挖取果实时需执行类似功能,在该领域将穰与皮分离是一个核心问题。
⑥筛选合适技术:最常用的方法是通过勺状工具将内穰剖出,可利用该方法将秸秆皮穰进行分离。
通过FOS提出概念解11:在刮穰辊上设置8组刮穰刀具,每组沿圆周均布有6对刮穰刀片,刮穰刀片通过螺栓连接在刀座上。每对刀片同时对已被剖切为两半的秸秆进行刮穰作业。
3.7.2 去穰机构组成及工作原理
图14为去穰机构的示意图。当秸秆被切割机构剖切后,机械手将被切成两半的秸秆送至刮穰机构处,秸秆穰在旋转刀具作用下被刮除,从而实现秸秆皮与秸秆穰的分离。刮穰刀与刮穰辊采用螺栓连接,以便于拆卸和更换。

图14 去穰机构结构示意图Fig.14 Schematic diagram of the flesh removingmechanism
3.8 收集机构设计
收集机构的作用是分类收集秸秆皮、穰、叶。
3.8.1 应用TRIZ的金鱼法求解
TRIZ中金鱼法可以将思维惯性带来的想法重新定位和思考,有助于将幻想式的解决构想转变成切实可行的构想,本文中金鱼法的求解流程如下所示。
①问题现实和幻想是什么?现实是皮穰不易分类收集;幻想是皮穰能够自己分类收集。
②幻想部分为什么不能实现?皮穰分离后处于混合状态。
③幻想部分如何变为现实?皮穰分离后利用重力自动落入相应的收集机构内。
④有哪些可利用的资源?机架结构、机械场和重力场。
由物质资源“机架结构”提出概念解12:通过改变机架自身结构,设置能够收集秸秆皮的装置,节约成本。
由能量资源“重力场”提出概念解13:让实现分离后的物料在重力作用下自由落体进入收集装置内,再通过刀具旋转,使物料具有一定初速度从分离机构中抛出至下方倾斜板实现自动收集物料的目的。
3.8.2 收集机构组成及工作原理
收集机构包括皮、穰、叶的收集装置。秸秆皮落入夹持机构后下方的倾斜收皮台,秸秆穰在旋转刮刀的作用下抛入倾斜的收穰台,秸秆叶落入机架下方后由工人打扫清除,以此实现秸秆皮、穰、叶的分类收集。
4 整机结构及工作原理
综合各概念解创新设计的秸秆皮穰分离机如图15所示。秸秆通过喂入台在喂入辊的作用下进入除叶机构,当秸秆截面较大时,可以通过推动架将其推入机器内;上、下除叶盘等速反向旋转将叶子撕扯剥离;除叶后的秸秆进入定位切割机构,沿着秸秆轴长方向剖切为两半;当夹持机构中的红外感应器检测到秸秆,发出指令控制机械手向下伸长抓取夹持秸秆并向前移动,通过刮穰机构去除秸秆穰并抛入秸秆穰收集台;当秸秆移动至行程终点,机械手松开秸秆皮将其落入下方的秸秆皮收集台。

图15 秸秆皮穰分离机的三维结构示意图Fig.15 Three-dimensional structural diagram of the stalk bark-flesh separationmachine
5 结论
为实现秸秆的高品质精细化利用,本文基于TRIZ理论进行秸秆皮穰分离机的概念设计,提出了“去除秸秆叶-切开秸秆皮-刮除秸秆穰-分类收集”的加工方式,可在实现秸秆皮穰分离的同时,不破坏秸秆皮的力学性能;采用单株整秆的皮穰叶分离方式,通过定量分道式喂入,实现精准除叶、定位、切割、去穰作业;分别设置有秸秆皮、穰、叶出料处,可实现分类收集。在产品概念设计阶段应用TRIZ理论,可以辅助设计人员寻找新思路、新方法,获得高质量、多层次的创新方案。