AT换挡执行机构自学习控制策略研究
2021-05-25刘向前杨慧斌贾茜伟
刘向前,闫 娟,杨慧斌,贾茜伟
(上海工程技术大学机械与汽车工程学院,上海 201620)
0 引言
为实现AT 变速器自动换挡,在保留传统变速器原有零部件结构的同时,还需一套自动换挡的执行机构装置。选用AT 换挡执行机构不仅可使变速缓和、行驶平稳,而且可大幅降低驾驶疲劳,这是当前换挡常用主流方法。但是,由于变速箱及执行机构加工、制造及装配误差的存在,导致不同的变速箱在与执行机构进行安装匹配时存在初始误差角度值问题。针对该问题,国内外众多研究者对其安装精度要求、控制算法进行了不同的试验研究[1-3],包括原点集匹配、负荷预测及对特征点进行QRS 特征提取等方法。原点集的匹配与QRS 均通过提取不同特征点方法实现不同点之间的匹配;文献[4-5]从几何精度入手进行了相应试验探究,发现随着时间的累计,误差值也在累积;文献[6]探讨了AT 切换档位规律方法;文献[7]等研究了执行机构与AT 匹配的互补性关系;文献[8-12]等对换挡的自动检测系统进行了不同设计与研究;文献[13]探讨了自适应的组合算法;文献[14-17]通过优化不同粒子算法达到零速修正的目的。针对初始角度误差值问题,本文基于32 位STM 型系列单片机对执行机构进行自学习算法开发与设计,通过采集执行机构电流、位置、旋转角度等信号搭建换挡执行机构(见图1),采用自设计的自学习控制策略自行对初始角度误差值进行补偿与修正,并在算法程序设计的基础上进行实车试验。结果显示,本文开发优化的自学习策略可消除初始误差值,满足执行机构性能要求。
1 机构自学习控制策略总体设计方案
本文学习控制策略采用32 位ARM-Cortex-M4 内核单片机S9S12ZVC12VLF_LQFP48 作为中心处理器,运用内部特征定时器、AD 转换等模块实时采集各种输入信号信息和机构反馈信号信息,进而对输入信号与反馈信号进行运算处理。采用PWM 脉宽调制对执行机构的电机进行控制,实现换挡时速度大小控制。
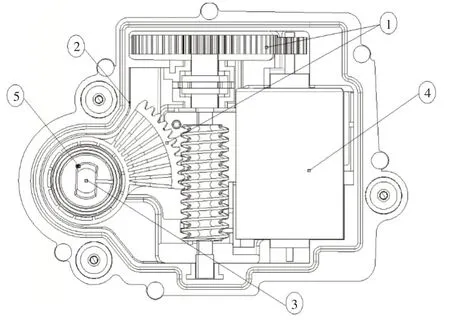
Fig.1 Structure of shift actuator图1 换挡执行机构结构
其中,①代表换挡齿轮组,②代表位置传感器,③代表换挡轴,④代表直流驱动电机,⑤代表换挡限检测装置。
由于不同变速箱轴的起始位置不能保证完全在同一个位置,即存在一定初始误差,所以在执行机构与变速箱连接时需执行机构自动匹配变速箱不同的初始角度值。本文通过采集执行机构在工作状况下的各档位初始角度值,构建机构系统流程(见图2),与实际理论值作比较,求出误差并补偿角度值,进而实现其执行机构与不同型号的变速箱匹配安装[18]。其SBW 接口信号如图3 所示。
2 硬件系统搭建
为了使自学习控制策略适应不同的工作环境、使用要求,进行硬件系统搭建。
2.1 最小系统模块
本文采用32 位ARM-Cortex-M4 内核S9S12ZVC_LQFP48 作为处理器,将设计优化的控制策略与执行机构系统匹配,使换挡和变速器处理方面更迅速、可靠性更高,适应性更强。同时,为使处理器发挥最大性能效应,为其搭建滤波电路、过流检测电路、H 桥电路及复位电路。

Fig.2 Flow of mechanism system图2 机构系统流程
2.2 过流检测模块
在执行机构与变速箱匹配后,由于执行机构及变速器运行过程存在不确定性,可能引起机构驱动电机堵转的情况,在该情况下,系统电流会迅速增大。因此本文基于LM2904 芯片设计电机过流检测保护电路,如图4 所示。
2.3 电机驱动模块
电机驱动速度调节由核心处理器PWM 模块输出的占空比控制。由于为中心处理器输出的脉宽电流指标仅为几毫安,无法驱动芯片运转。因此必须通过搭建H 桥驱动放大毫安级电流,进而提高驱动电机能力。其设计电路如图5 所示。
该电路通过集成芯片设计全桥驱动,由搭建的H 桥驱动电路,实现控制电机驱动进行正常运转工作。
2.4 通讯模块
本文中采用S9S12ZVC12VLF_LQFP48 中心处理器进行通讯连接,通过执行机构与变速箱安装连接试验,实现电流、位置变化信号实时监测,以便更精确控制。由于处理器处理的信号需要对其进行跟踪监测,本文采用与上位机进行相连方式,由上位机对其进行实时检测与反馈。由于处理器输出的是TTL 信号,需要将进行信号转换才可被上位机接收。本文采用RS232 通讯电路,该电路芯片采用性能良好的MAX232 芯片将USB 信号转为TTL 信号,总体通讯结构如图6 所示。
3 优化的机构自学习控制策略与验证

Fig.3 SBW interface signal图3 SBW 接口信号
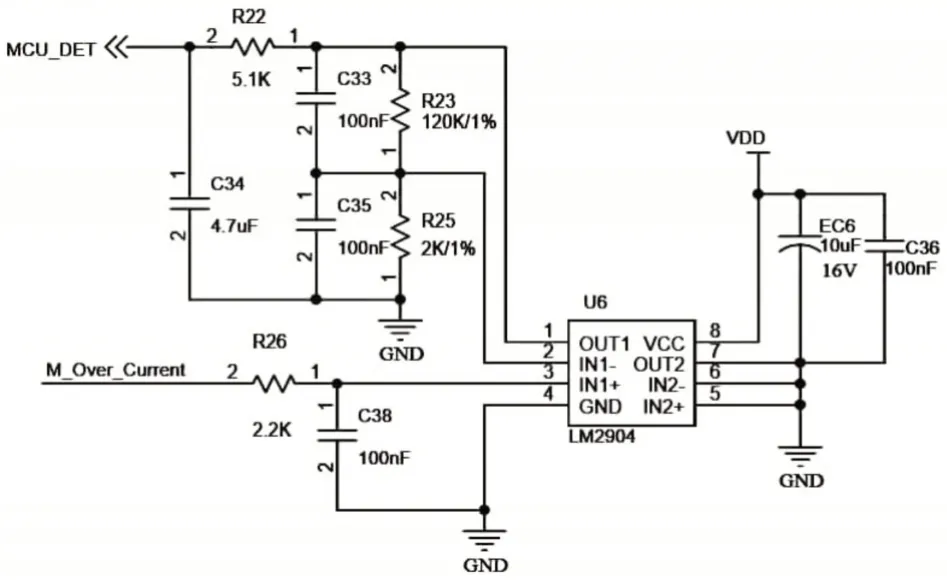
Fig.4 Over current detection module图4 过电流检测模块
本文通过执行机构电流信号与机构冠齿轮位置角度信号实现换挡执行机构控制。由于不同的执行机构需与不同的变速箱进行安装匹配,会导致一定的配合误差,需通过自学习策略进行初始化位置角度误差修正与补偿。
通过实时采集机构电流与冠齿角度信号,首先判断电流信号变化情况,若增大或恒定不变,再对角度值是否达到增档规律的换挡极限点进行判断,其中不同的临界点由不同的角度值确定,若达到增档极限点则进行自动升档操作处理;同理,可判别是否达到减档临界限点,若达到则进行自动减档操作处理。
3.1 采集信号处理
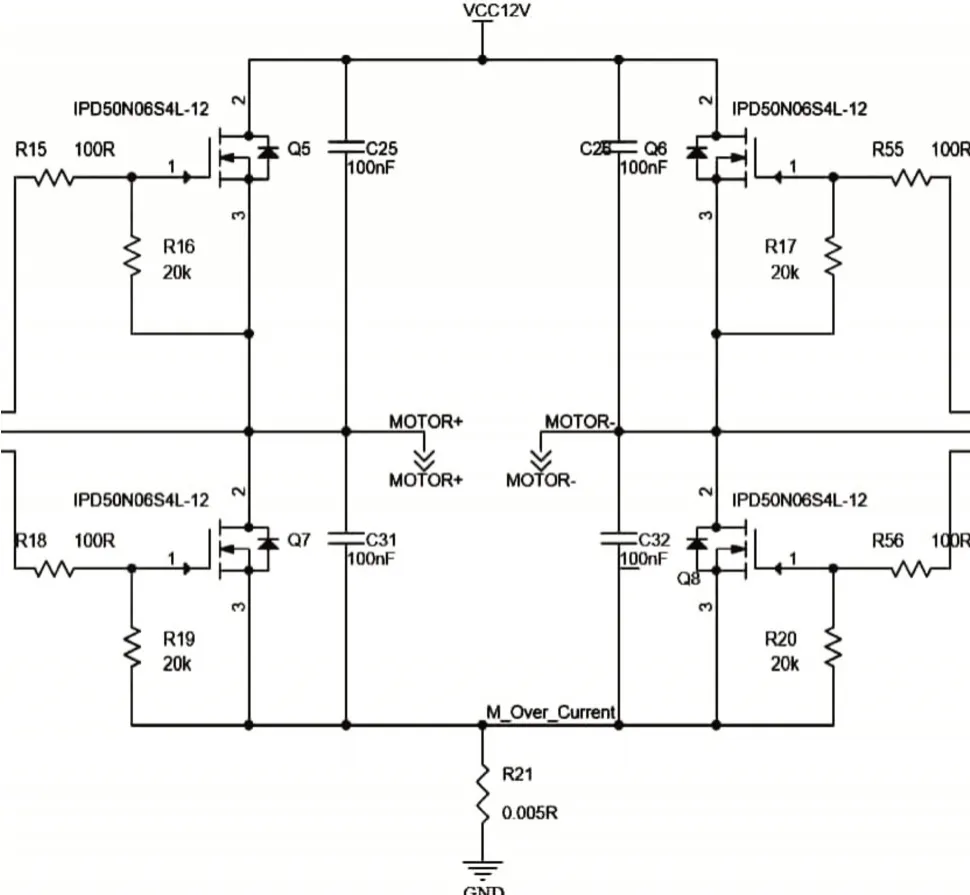
Fig.5 H-bridge drive circuit图5 H 桥驱动电路
Kalman[19]在1960 年发表的论文《A New Approach to Linear Filtering and Prediction Problems》中阐释了卡尔曼滤波原理,即采用在与系统状态关联的观测量中预测所需信号值的最优算法递推滤波。由于卡尔曼滤波设计范围是在时域内设计的滤波器,而且需要保存的数据相对较少,所以具有很强的适应性[20]。由于实现过程由计算机实现,需将方程进行离散过程化处理,假设系统模型方程为:
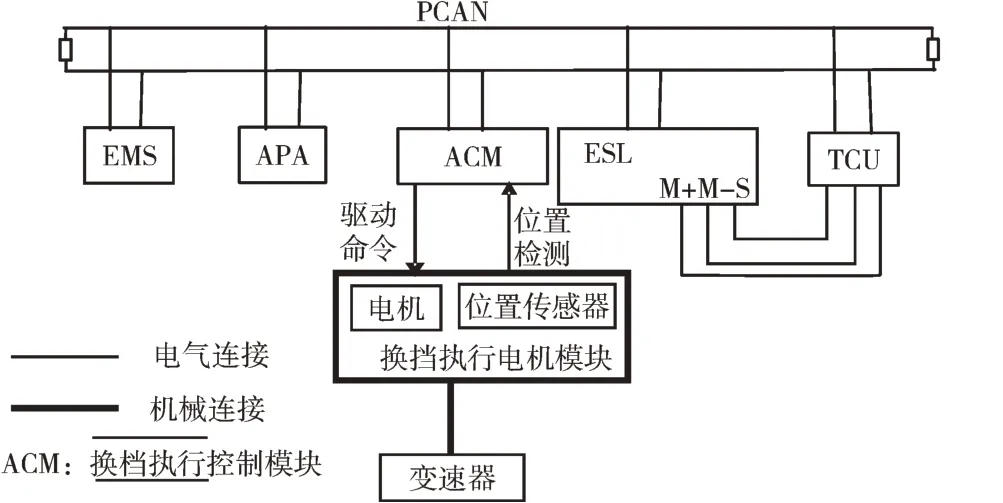
Fig.6 General communication structure layout图6 总体通讯结构布置

X(n)为状态函数,W(n-1)为模型噪声,Z(n)为模型观测向量,H(n)是模型观测矩阵,V(n)是模型观测噪声。
W(n-1)和V(n)是概率密度函数且服从:

其中,Q 和R 为协方差矩阵。
建立具有不确定性的卡尔曼滤波方程可分为两个环节。
(1)系统状态过程预估为:

系统状态预估误差矩阵为:

需初始值X(0|0)和P(0|0),即可根据当前时刻系统值与前一时刻的值得到当前预估值。
增益矩阵:

(2)系统状态估计为:

系统状态估计误差矩阵为:

得出滤波前后图形如图7 所示。

Fig.7 Filter view图7 滤波视图
由图7 可知,经卡尔曼滤波后信号干扰滤除,同时系统抗干扰能力极大增强。
3.2 鸡冠图线提取
本文在鸡冠线上手动提取83 个测点数据。为提高曲线光滑程度,采用插值处理方法,等距提取测量点,扩充数据点至187 个(测点个数可根据实际提取测点更改),其提取图像如图8 所示。

Fig.8 Cockscomb line图8 鸡冠线图
由皮尔逊相关系数判断其相关性:

计算相关系数前提,x 和y 数据量必须一致,x 为测点提取数据(187 个),y 为实际测量数据。后期可根据需要实际测量数据个数,更改鸡冠线测点数据。为保证准确性,需等距测量实际数据,其结果值为0.8-1.0 时,判断极强相关,并得出电流与角度拟合曲线图8 所示。
3.3 二分类逻辑回归迭代改进
传统多元回归输出对于每个输入的x 均有对应的y 输出,通常是连续的、线性的。而对于执行机构驱动电机,为实现精确的控制器机构换挡操作,需将采集的模拟量信号转换为数字量信号,对应于驱动电机的启动或停止。显然,线性多元回归不满足该模型机构控制要求[20]。为使机构对采集的不同类信号进行归类处理,本文采用优化的逻辑回归算法,运用Sigmoid 函数y=构造预测函数(9),其中Z 代表预测值。
其中函数值大小结果取1 的概率,因此,根据输入x 分类结果,即类别1、类别0 的概率为:

其运行结果如图9 所示。

Fig.9 Experimental execution effect of self-learning algorithm图9 自学习算法实验执行效果
由图9(a)可看出,在自学习控制算法未载入前,得到的最终曲线图无法采集到机构中间信号变化量;而且,初始安装误差无法自行校正;图9(b)显示了本文自学习逻辑算法对信号采集的优化效果。在自学习控制策略载入后,得到了与理想机构近似相同的图线,同时机构中间信号极值处可被采集到,使换挡点得到更好控制。这不仅进一步证明自学习控制策略准确性高,具有更优灵敏度,而且可使执行机构与不同变速器匹配后换挡操作稳定运行。
4 结语
执行机构与不同AT 安装匹配时存在大小值不一的初始误差角度值,为解决该问题,本文基于改进卡尔曼滤波与二分类逻辑回归算法,设计双芯片架构的自学习控制策略,兼具功能性与工程实用性,最终实现了初始角度误差值自行补偿与修正,克服了传统机构存在的缺陷。
本文自学习控制策略具有良好可靠性、适应性及实用性,对我国执行机构自动换挡技术发展与产业化具有重要推进意义。但本文在换挡执行过程中可能存在误差值,未进行实时检测及补偿修正,这是下一步研究内容。
