双馈异步风力机BP神经网络空载并网控制
2021-05-21王嘉良
王嘉良
(河海大学 能源与电气学院,江苏 南京 211100 )
0 引言
据统计,地球上可开发利用的风能大约为2×107MW,从20世纪初开始,国际社会不断注重风力发电技术的发展[1]。随着近20年的发展,风力发电系统的单机容量不断增大,主流机型逐渐发展为兆瓦级机组,在并网过程中风力发电机组的安全问题、对电网产生的电流冲击问题以及电能质量问题引起研究人员的重视[2]。双馈异步风力发电系统由于使用的功率变流器较小,降低了成本,而且控制性能较高,因此成为风力发电中的一种主流机型。双馈异步风力发电系统主要有空载并网、独立负载并网和孤岛并网3种并网方式,其中空载并网由于结构简单且控制性能好,因此应用最为广泛[3]。
文献[4]通过分析交流励磁变速恒频风力发电机组运行特点,研究了矢量并网控制技术,提出了基于定子磁链定向的空载并网策略,减小了并网时的冲击电流,但是对模型参数的要求比较高。文献[5]将电网电压定向矢量控制应用于空载并网策略中,该控制策略将定子磁链的检测省去,减小了检测误差,降低了电网冲击。文献[6]将高阶滑模控制应用于电网电压定向的空载并网控制策略,消除控制量中的抖振,增强了鲁棒性,更有利于实现无冲击电流的快速并网。文献[7]在双馈异步发电机空载并网模型的基础上,介绍了一种自并网算法,并通过自主研制的试验平台进行仿真和试验研究,实现柔性并网。文献[8-10]分别利用变结构控制与全状态反馈线性化结合的控制策略[8]、模糊控制[9]和积分滑模控制[10]实现发电机空载并网,且在并网后能够实现最大风能追踪以及有功功率与无功功率的解耦控制。文献[11]采用“空载-并网”两阶段控制的方案,实现“空载”和“并网”两个工作状态的平滑转移,并网过程中对电网电压的跟踪能力强,冲击电流小,并网后能够实现功率的解耦控制和最大风能追踪。
本文建立了双馈异步发电机(doubly-fed induction generator, DFIG)同步坐标系下的数学模型,对空载并网的原理进行分析,通过BP神经网络调整PID控制器参数,实现转子侧电流对定子侧电压的有效最优控制,并建立仿真模型,通过仿真结果的对比,验证了所用控制方法的合理性和有效性。
1 双馈异步发电机空载数学模型
1.1 同步坐标系下DFIG的数学模型:
本文中双馈异步发电机采用电动机惯例。假设异步发电机具有三相平衡对称结构、定子和转子铁芯与铁损耗为线性关系,其数学模型为:
1)定子侧和转子侧电压方程分别为:
(1)
式中:vds、vqs、vdr、vqr分别是定子和转子在dq轴上的电压分量;Rs、Rr分别是定子和转子绕组电阻;ids、iqs、idr、iqr分别为定子和转子在dq轴上的电流分量;ψds、ψqs、ψdr、ψqr分别为定子、转子在dq轴上的磁链分量;ωr、ω1分别为转子角速度和同步角速度;p为微分算子,p=d/dt。
2)定子侧和转子侧磁链方程分别为:
(2)
式中:Lm为励磁电感;Ls、Lr分别为定子漏感和转子漏感。
3)运动方程为:
(3)
式中:Tm、Te分别为发电机机械转矩、电磁转矩;J为转子转动惯量。
4)转矩方程为:
(4)
式中np为发电机极对数。
1.2 空载并网数学模型
当双馈异步风力发电机定子电压的幅值、频率和相位与电网电压的幅值、频率以及相位一致时,满足并网要求,在并网前后通过采用定子磁链定向矢量控制策略来实现控制要求。采用发电机定子磁链定向,且忽略定子电阻,将定子磁链定向在d轴上,则磁链方程为:
(5)
由式(5)得定子电流为:
(6)
将式(5)和式(6)代入式(1)得:
(7)
当双馈异步发电机在空载运行状态下时,定子电流为0,即ids=iqs=0,电压方程和磁链方程简化为:
(8)
式中ωs=ω1-ωr,为转差角速度。
(9)
由于定子电阻与定子电感相比很小,因此通常可以忽略,在定子磁链定向的情况下,磁链方程为:
(10)
在双馈异步风力发电系统的空载并网控制中,电磁转矩为0,不考虑变桨距控制,机械模块仅输入风速V。根据风力机的机械功率和机械转矩可得发电机的机械转速[12]:
(11)
式中:ρ为空气密度;R为风轮半径;Cp为风能利用系数;np为发电机极对数。
2 BP神经网络PID空载并网控制
BP神经网络PID控制器由BP神经网络和经典的PID控制构成,本文采用3层BP网络结构[13],选取Sigmoid函数为活化函数,被控对象由PID控制器实现闭环控制,PID控制器的3个参数Kp、Ki、Kd由BP神经网络根据系统的运行状态,通过自学习和调整加权系数的方式进行在线调整,实现在稳定状态下系统最优控制的目的。BP神经网络PID控制系统结构如图1所示。
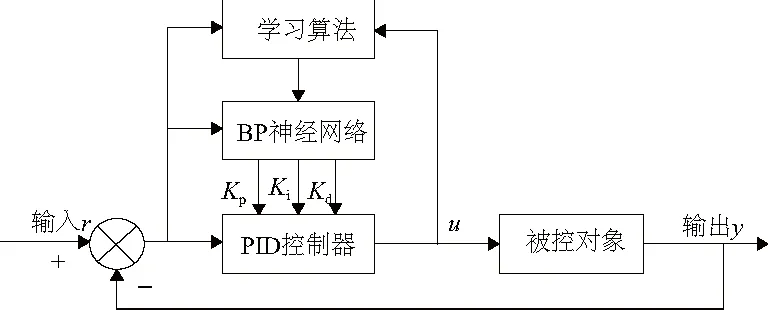
图1 BP神经网络PID结构图


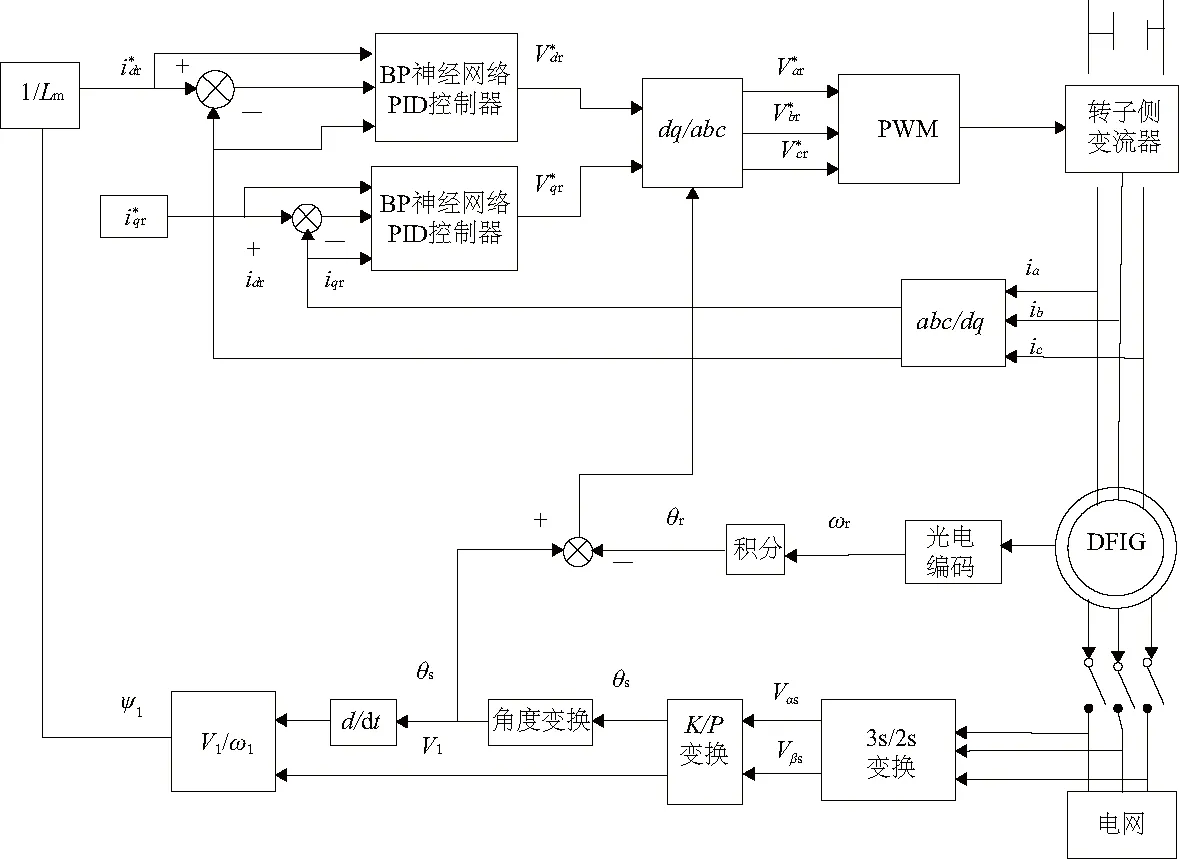
图2 BP神经网络PID控制框图
3 仿真分析
本文在Matlab/Simulink仿真软件中搭建了双馈异步发电机BP神经网络PID空载并网仿真模型(图3),并与普通PID控制进行比较分析,以验证本文使用的并网控制策略的有效性。双馈异步发电机的参数如下:额定功率为1.5 MW,额定电压为690 V,额定风速为12 m/s,输入风速为7 m/s,风轮半径为31 m,空气密度为1.225 kg/m3,风能利用系数为0.48,发电机极对数为2,定子电阻为2.65 MΩ,定子漏感为0.168 7 MH,转子电阻为2.63 MΩ,转子漏感为0.133 7 MH,励磁电感为5.474 9 MH。
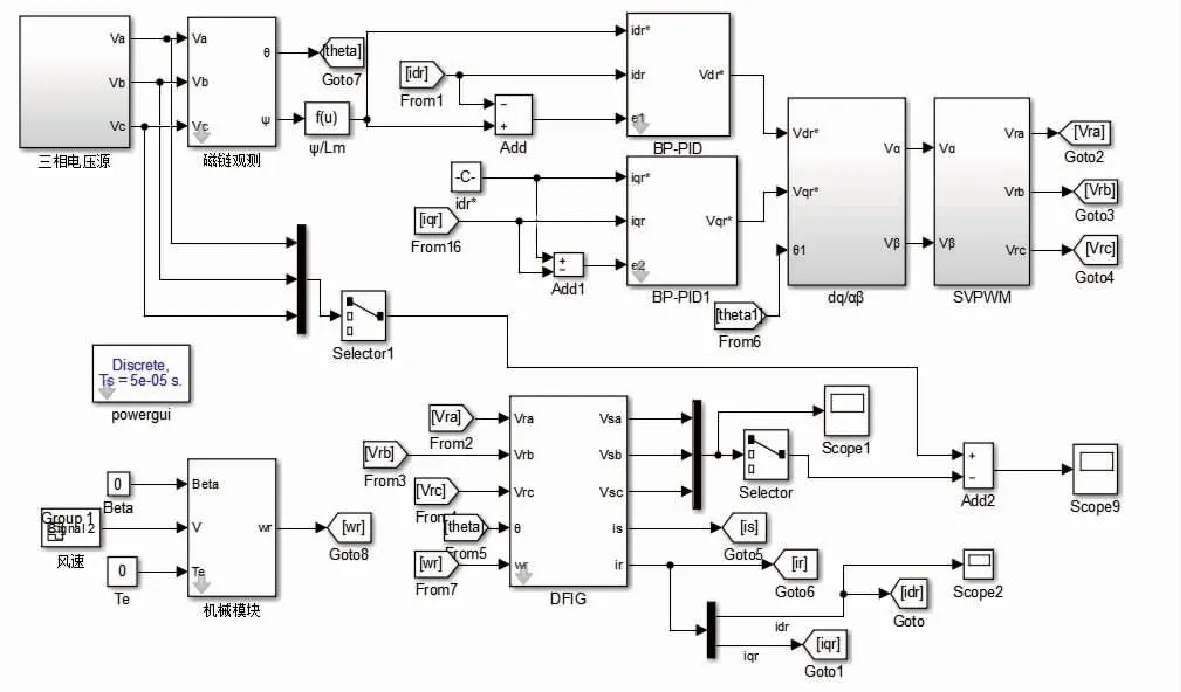
图3 BP神经网络空载仿真
在理想状态下,对双馈异步发电机进行仿真模拟。图4为电网电压曲线图,图5为BP神经网络PID控制策略下定子侧电压曲线图,图6为普通PID控制策略下定子侧电压曲线图,图7为两种控制策略下电压误差曲线图,图8为两种控制策略下转子电流d轴分量曲线图,图9为电网发生短暂波动时的电压曲线,图10为电压波动状况下的电压误差曲线图。
图4-图6是在空载运行状态下,两种控制方式下电网电压和定子侧电压的仿真曲线图。从图5-图6可见,定子侧电压从波动状态快速变换到与电网电压的幅值、频率和相位一致的稳定状态,达到并网要求。
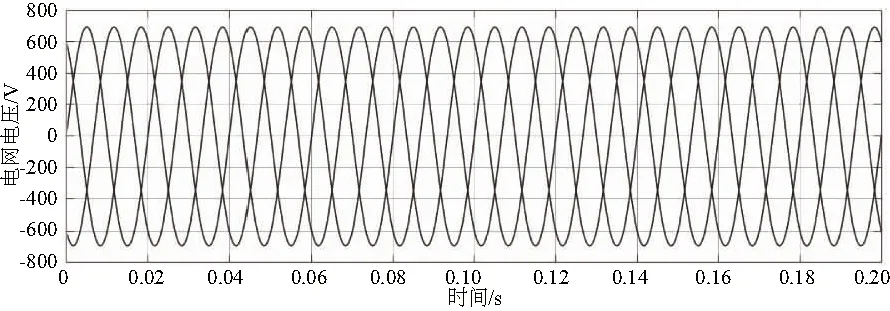
图4 电网电压曲线
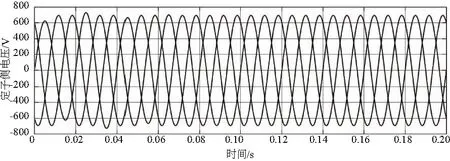
图5 BP神经网络PID控制定子侧电压曲线
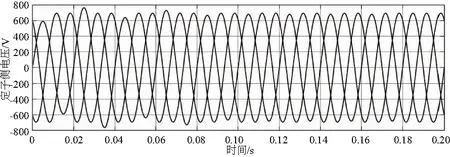
图6 PID控制定子侧电压曲线
图7为BP神经网络PID控制与普通PID控制空载并网时发电机定子电压与电网电压误差的输出曲线,由图可见BP神经网络PID控制策略的电压误差更小,电压波动的时间更短,达到并网要求的速度更快。在0.08 s时,电压误差值为0,此时满足并网要求,完成并网。
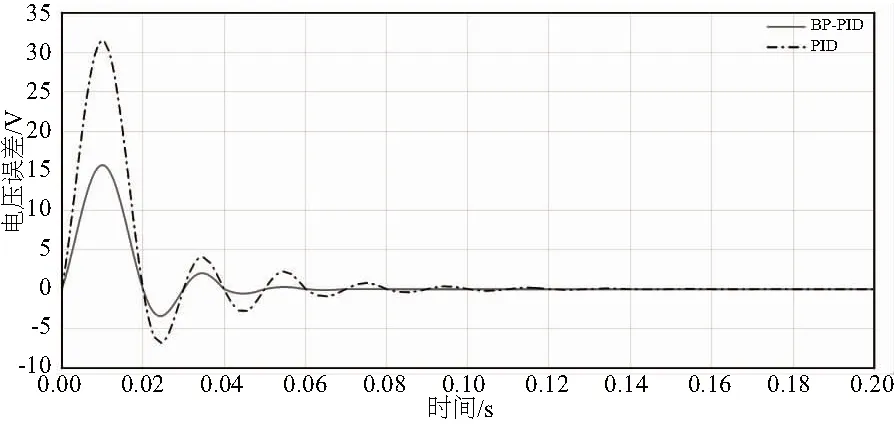
图7 电压误差曲线
图8为两种控制策略的转子电流d轴分量的曲线图。在BP神经网络PID控制策略中,转子电流在0.08 s时达到稳定状态,普通PID控制策略在0.18 s时达到稳定状态;在满足空载并网要求的基础上,BP神经网络PID控制的效果明显优于普通PID控制,电压波动更小,较短的时间即可达到稳定状态,提高了系统的控制效率。
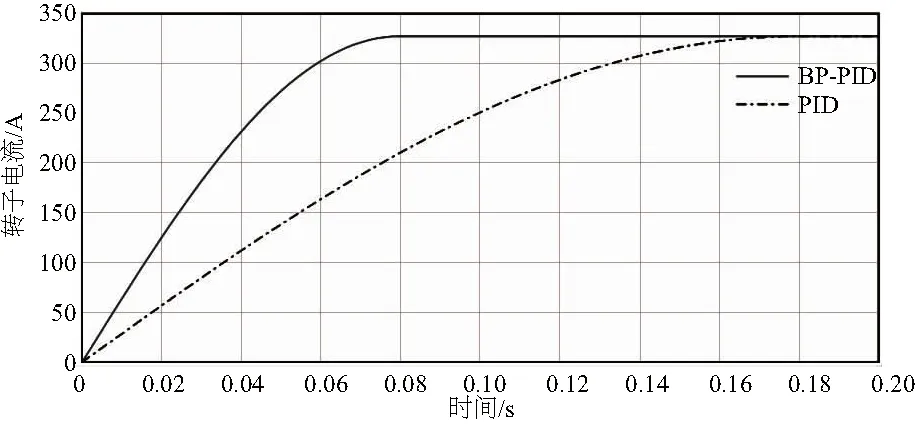
图8 转子电流曲线
电网电压发生如图9所示的短暂波动,图10表示了两种控制策略的电压误差曲线,从误差曲线图可知,BP神经网络PID控制策略在电网波动情况下对电网电压的追踪效果仍然良好,精度更高;而普通PID控制策略对电网电压的跟踪效果较差,电压误差波动较大,达到稳定状态的时间更长。
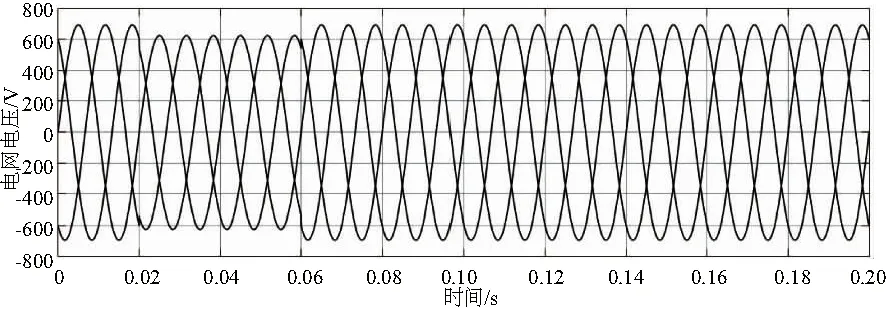
图9 短暂波动时的电网电压曲线
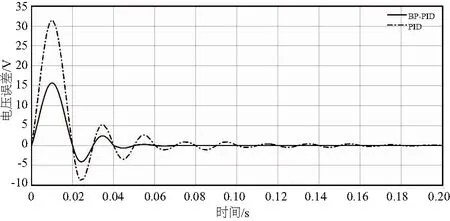
图10 电压波动状况下的电压误差曲线
4 结语
本文在双馈异步发电机空载并网的基础上,利用BP神经网络调节PID控制器的参数,构建了BP神经网络PID空载并网控制。研究表明,在该控制策略下,定子电压对电网电压的追踪效果较好,电压误差快速趋近于0,控制效果相比普通PID控制更优,是一种优良的并网控制策略。
