500 kV瓷套清扫机械臂的研制
2021-05-21陈昊陈玮光叶昱媛何嘉弘徐伟伦
陈昊,陈玮光,叶昱媛,何嘉弘,徐伟伦
(1. 国网江苏省电力有限公司检修分公司,江苏 南京 211102; 2. 东南大学 电气工程学院,江苏 南京 210096)
0 引言
500 kV电网是超高压电力系统的主动脉,承担着省级电网电能输送的重任。随着我国社会经济的发展和电网建设的不断推进,500 kV变电站电气设备的安全运行水平越来越受人瞩目[1-2]。当遇到大雾等不良天气时,绝缘子表面上附着污秽后容易发生污闪[3],引起保护装置动作[4-5],进而造成大面积线路停电等现象,严重时甚至造成人员伤亡。在此背景下,绝缘子防污闪措施的意义格外凸显。另一方面,随着物联网(IoT)的发展,智能运检逐渐成为电网技术智能化发展的新兴研究方向。瓷套是变电站内绝缘子的主要形式,瓷套清扫是绝缘子防污闪的重要措施[6],近年来已有较多的研究成果[7-9]。文献[10]研制了一种绝缘子风力清扫环。文献[11]设计了一种针对带电清扫机器人的液压自动调平系统。文献[12]研制了一种超高压带电作业机器人,作为一种新型的绝缘子清扫机械臂应用于现场。文献[13]设计了一种360°全方位半自动清扫的机械装置。文献[14]设计了一种盘形悬式绝缘子手持式气动清扫装置,克服了工程应用中清洗存在死角的问题。传统的清扫方式主要依靠人力进行瓷套表面的擦洗,清洗效率低、难度大,除污质量对人员的依赖性大,清洗质量一致性不高,工作人员安全难以得到保障。而目前已有的一些绝缘子清扫装置虽然可以有效辅助人工进行绝缘子的清扫,一定程度上提高了清扫的效率和效果,但其本质还是人工去污方式,需要寻找一种更为高效的机械自动擦洗清扫装置去替代人的工作。
本文研制了一种应用于变电站停电检修情况下,针对500 kV瓷套的清扫机械臂,该装置采用开口清扫圆环结构以适应变电站现场复杂的环境,采用变轴长清污刷杆设计以提高清扫的效率,控制系统保证清洗质量的一致性,在南京电网的实践验证了机械臂的清扫效果。
1 系统组成
瓷套清扫机械臂主要由移动电动升降平台、清扫刷头、丝杠模组、光电开关、操作箱(含控制触摸屏)和驱动控制箱等6大组件构成。装置设计方案如图1所示。
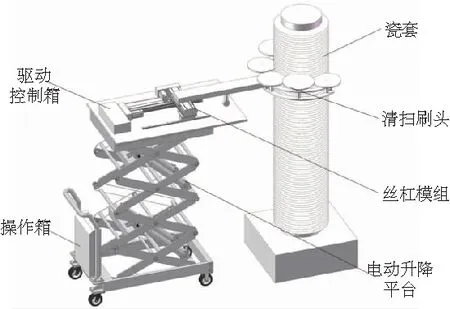
图1 瓷套清扫机械臂示意图
1.1 电动升降平台
电动升降平台采用剪叉式机械结构,具有较高的稳定性且结构紧凑、运输状态尺寸小、承载能力高、高空作业范围大,并适合搭载多种检测仪器同时作业。
1.2 操作箱
操作箱安装于电动升降平台的移动底座上,包括操作按钮盒和工业控制触摸屏。操作按钮盒操作简单,可以通过按钮切换手动和自动控制模式。工业控制触摸屏适用于调试工程师进行现场参数的配置,调整电动升降平台的上升速度、下降速度、平台的上升高度、丝杠模组的移动速度和清扫刷头电机的工作转速。
1.3 驱动控制箱
驱动控制箱安装于电动升降平台的工作台上,内部安装有步进电机驱动器,直流电机驱动器,S7-200 PLC以及相关中继继电器。它是整个清扫机械臂工作状态下的控制核心。
1.4 丝杠模组
丝杠模组和其驱动电机采用平行安装方式,以减小模组整体体积。上模组安装位安装有清扫刷头,经减速机带动进行X和Y自由度方向的平移运动,以针对瓷套进行定位调整。
1.5 清扫刷头
清扫刷头采用铝合金定制,刷头安装6个清扫电机和3个光电开关定位。清扫机械臂伸出长度为0.9 m,伸长杆中间位置安装有支撑万向轮,以减轻清扫机械臂末端由于装置自重产生的转矩影响,增强装置的结构稳定性。
1.6 光电开关
光电开关间隔120°安装于清扫机械臂的末端圆环上。光电开关感应距离为50 mm,通过相应光电开关定位组的反馈,判断瓷套所在的位置,进一步对清扫机械臂进行移动调整,使得瓷套位于清扫刷头开口圆环的中心位置。
2 机构设计
2.1 清扫刷头设计
清扫刷头是清扫机械臂的核心。针对500 kV瓷套设计了一种120°圆环开口的清扫刷头结构,如图2所示。本文提出的120°圆环开口的清扫刷头结构具备多角度接近并进行瓷套自动对准定位的功能,在变电站复杂工作环境适应性和现场可操作性两个维度达到了很好的平衡。
本结构采用中间位置安装有万向轮支撑装置的伸长杆,一方面实现刷头装置的伸出,另一方面利用万向轮支撑提高结构的稳定性,减小刷头自重所产生的转矩影响。
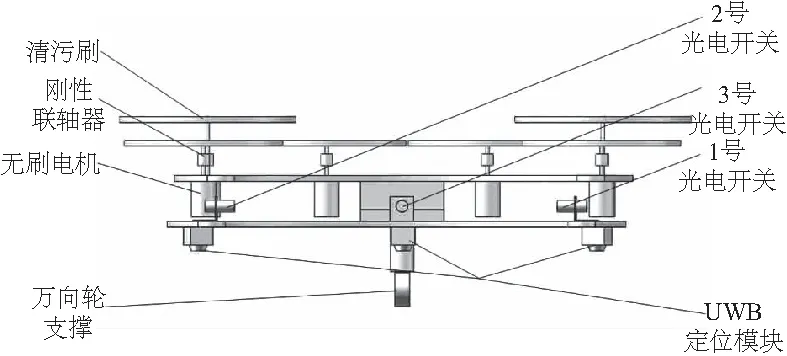
图2 瓷套清扫刷头结构图
直流电机和清污刷之间通过刚性联轴器连接,具有良好的结构稳定性。由于清污刷刷毛较长,近距离安装时相邻清污刷之间难免发生碰擦与干扰,因此本结构采用变轴长清污刷杆,使相邻清污刷处在不同的工作平面上,有效增加清扫覆盖面积,提高清扫效率。
2.2 光电开关设计
光电开关是瓷套清扫机械臂的定位核心,其在清扫刷头圆环上间隔120°安装,如图2所示。圆环开口处的1号光电开关和2号光电开关正对安装,作为一级定位组,实现瓷套的对中,即使瓷套位于圆环开口连线中心。圆环末端与伸长杆连接处安装2号光电开关,作为二级定位组。当装置完成一级定位动作,使瓷套位于圆环开口连线中心时,丝杠模组带动清扫刷头前进,瓷套进入圆环内部。当末端3号光电开关动作时,说明瓷套已经位于开口圆环的中心位置,即完成了二级定位。
2.3 基于激光测距模块的同轴定位设计
上节给出的二级定位是一种针对清扫刷头的平面定位方法。在实际应用中,当瓷套清扫机械臂开始清扫工作时,装置存在沿瓷套的轴向运动,仅有的瓷套平面定位无法保证在运动过程中瓷套始终处于开口圆环的中心位置。例如,当瓷套本体存在轻微倾斜情况时,很可能在清扫工作持续一段时间后,细微倾斜的影响逐渐显现,直到发生与瓷套本体发生碰擦,导致机械臂急停。为了保证清扫机械臂在上升与下降的过程避免与瓷套本体发生碰撞的危险,本文在三点式检测原理的基础上[15]提出了一种基于激光测距模块的同轴定位方法,如图3所示。
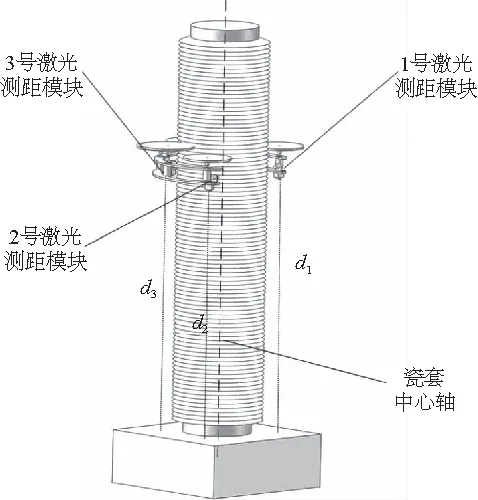
图3 基于激光测距的同轴定位方法
激光测距模块安装于3个光电开关的正下方,编号与对应光电开关保持一致,如图2和图3所示。通过测量每个激光测距模块到瓷套底部固定支柱的距离,判断清扫刷头是否与瓷套保持同轴位置。若3个激光测距模块测量出的距离超出给定的误差范围,首先通过其距离差值折算出工作平台的倾斜角度,然后利用下文提到的同轴调节控制方法,实现瓷套自动清扫装置整体的调平工作,保证清扫刷头工作方向与瓷套中心轴方向一致。
3 自动控制系统设计
3.1 基于S7-200 PLC的控制系统设计
图4是系统原理图。S7-200 PLC是整个清扫机械臂的控制核心,通过接收传感器的信号控制清扫机械臂的各执行机构动作。光电开关判断瓷套所在的位置,PLC接收到信号后,发出高速脉冲控制步进电机驱动器工作,驱动模组步进电机,使丝杠模组调整到合适的位置,光电开关和模组限位开关作为传感器反馈,判断目标瓷套所在的位置以及防止装置碰撞。上位机采用工控触摸屏与S7-200 PLC通信,进行运动控制和参数设置。
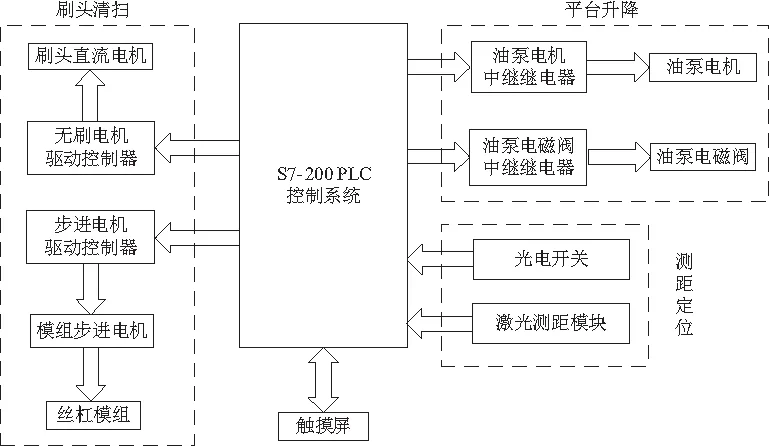
图4 装置系统原理图
3.2 同轴调节控制
为保证电动升降平台上升下降的过程中,清扫刷头圆环不会与瓷套发生碰撞,要求装置工作平台的倾角在允许的误差范围内,当倾角过大时可以自动进行同轴调节。本装置通过3个激光测距模块反馈的距离数据计算出工作平台的倾斜角度,实现实时倾角量反馈控制。
控制策略为门限控制,在清扫工作过程中进行自动的同轴调节。

根据门限控制策略,i时刻的X轴调节速率如式(1)所示。
(1)
门限控制策略实现了对绝对倾角的动态控制,能实现快速响应(1 s以内完成)。
3.3 基于UWB的带电区域感知技术
变电站内电气环境复杂,因此在工作人员配合瓷套清扫机械臂进行清扫时,首先要与带电区域保持足够的距离,以保护设备安全和人身安全。
本文提出一种基于UWB定位技术的安全距离控制与定位方法。基站在Ta1发射请求性质的脉冲信号,标签在Tb1时刻收到请求信号,并在Tb2时刻发射一个响应性质的信号,基站在Ta2时刻接收到该响应信号,则基站与标签之间的距离R可以通过下式进行计算:
R=C×[(Ta2-Ta1)-(Tb2-Tb1)]
(2)
其中C为光速。
机械臂基于移动UWB实现装置工作区域的小范围定位,实现了对作业附近带电区域的隔离,确保清扫工作中设备与人身安全。
3.4 工作流程
装置的控制分为手动和自动模式。手动模式下采用点动控制方式,通过工控触摸屏控制丝杠模组的移动、电动升降平台的升降和刷头电机的启动与停止。自动模式下,在完成人工初步定位使装置到达接近的位置时,可以一键实现瓷套的清扫。
自动清扫分为定位和清扫两个阶段。在定位阶段,人工将清扫刷头圆环开口与瓷套初步对准,按下自动清扫按钮,丝杠模组开始前进运动接近瓷套。当两者足够接近时,光电开关动作,前进运动停止,开始进行基于1号光电开关和2号光电开关的一级定位。瓷套一级定位对准完成以后,丝杠模组再次前进,直到清扫圆环末端3号光电开关动作时停止。此时说明目标瓷套已经位于清扫圆环的中心位置,二级定位完成,定位阶段结束,工作进入清扫阶段。
清扫过程中通过激光测距传感器实时监控工作平台的倾斜角度,通过同轴调节控制方法保证上升与下降的过程中清扫刷头工作方向与瓷套中心轴方向一致,避免碰撞危险。
4 现场试验
根据500 kV瓷套的结构尺寸确立了清扫机械臂的结构参数,并研制了瓷套清扫机械臂样机。经过实验室试验之后,在南京电网某500 kV设备现场,开展瓷套清扫试验,试验环境如图5所示。
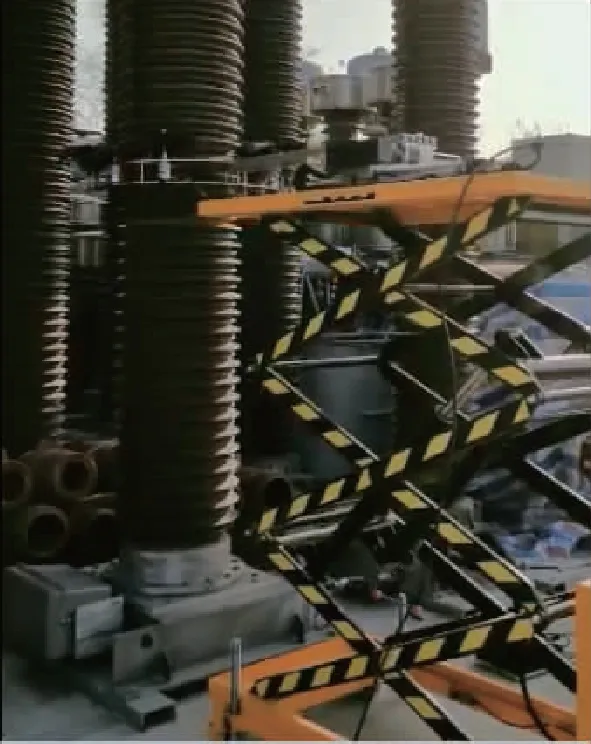
图5 实验平台
电动升降平台上装载的清扫刷头和丝杠模组总重55 kg,可以根据需求安装与拆卸,具有良好的适配性。清扫刷头伸长杆长度为0.9 m,保证清扫刷头有足够的接近调整距离。在刷头接近被试CT过程中,自动调平功能可以确保升降平台水平面始终保持平衡状态,在1 s中完成调整。
经过现场实验,考虑到工作人员初步定位的不确定性,清扫刷头的调整时间为50~95 s,而机械臂一次清扫的总时长仅需20 s,清扫效率相对人工清扫有了极大的提高,整个清扫过程具有良好的平稳性与一致性。此外,试验过程中,验证了机械臂对高压带电区域感知功能,能有效报警或切断电源,灵敏度亦达到设计预期。
综上,试验结果验证了清扫机械臂的实用性和稳定性,装置具有良好的清扫瓷套的能力。
5 结语
本文研制了一种500 kV瓷套清扫机械臂,该机械臂拥有高效的机械结构和灵活的控制系统,在南京电网的实践表明装置具有良好的清扫瓷套的能力,为以后的研究提供了重要指导意义。
