斜铰旋翼操纵力矩生成研究
2021-05-21王彪任至楷张宝晴唐超颖
王彪,任至楷,张宝晴,唐超颖
(南京航空航天大学 自动化学院,江苏 南京 211106)
0 引言
目前无人旋翼飞行器已经广泛应用于摄影、检修和安保等领域,且微型旋翼飞行器大多采用多旋翼构型。其主要原因是,除了具有对称结构的多旋翼飞行器,大多数旋翼飞行器都需要机械斜盘和驱动舵机来调节旋翼拉力方向。随着机体尺寸缩小,直接按传统结构等比例缩小操纵机构对制造工艺和材料提出更高的要求,这不利于飞行器的大规模应用。目前已开展了一些对于旋翼操纵机构的简化研究,例如GEORGE S与SAMUEL P合作为美国国防高级研究计划局研制了一款微型共轴旋翼飞行器[1],其采用了一种名为倾斜电机的机构,直接改变旋翼姿态,便于进行机体操纵;清华大学的吕俊刚等人制作了一种利用惯性与材料弹性对旋翼进行操纵的机构[2],通过电机的瞬时加速带动弹性连杆变形达到控制旋翼桨距的目的。本文所探究的斜铰旋翼最先由PAULOS J于2013年提出[3],其后又对该设计的工程应用进行了分析[4],该设计利用电机的加减速,结合特殊的机械机构,简化了整个旋翼推进系统,但同时也加大了旋翼控制的复杂度与难度。国内目前对于斜铰旋翼只有一些零星的尝试[5],未见对斜铰旋翼本身机理进行深入研究。因此本文将在建立旋翼数学模型基础上对斜铰旋翼应用方式进行深入研究。
1 斜铰旋翼原理分析与建模
1.1 斜铰旋翼机械结构
斜铰旋翼最初的设计理念即为减少多余的控制部件,只利用驱动电机就能够达到传统旋翼类似的操纵效果,因此斜铰旋翼与传统旋翼结构存在一定区别。其主要由桨叶、桨夹、桨毂组成,桨夹与桨毂之间存在一个倾斜铰链的设计,运行时桨夹能够绕斜铰做相对于桨毂的转动,具体部件如图1所示。

图1 斜铰旋翼组成框图
1.2 斜铰旋翼工作原理
对于斜铰旋翼推进系统的要求是其能够在去除自动倾斜器及相关舵机的同时保留实现周期变距和改变总矩的能力。结合前文斜铰旋翼机械结构可知,电机带动旋翼做匀速旋转的情况下,桨叶与桨毂之间无相对运动,桨叶随桨毂做匀速圆周运动,桨距角不发生变化;当电机带动桨毂做变速转动时,桨叶惯性和空气阻力会使桨叶相对桨毂产生超前/滞后的摆振运动,又由于斜铰的特殊结构,在产生摆振运动的同时也会有桨叶围绕变距轴线的旋转产生,即桨叶的变距运动。只要驱动电机以一个合适的周期性变化的转速带动桨毂转动,就能带动桨叶产生类似周期变距的效果。
1.3 斜铰旋翼动力学模型
由于机械结构的改变,斜铰旋翼桨叶运动相对于传统桨叶更加复杂。基于作者所在实验室前期研究工作[6],可将桨叶运动分解为桨叶的圆周平动与绕点转动来进行分析。
桨叶的圆周平动较为简单,桨叶相对惯性系姿态不变,随桨毂做圆周运动。绕点转动较为复杂,在桨根处建立坐标系,该坐标系同样随桨根做圆周平动,桨叶转动采用欧拉法描述,转动建模过程如图2所示。
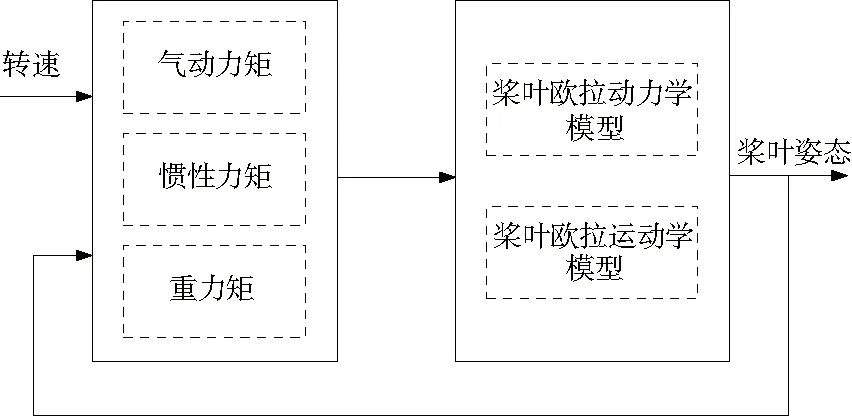
图2 斜铰旋翼非线性数学模型
图2中输入为桨毂转速;输出为桨叶姿态角。通过拟合得到桨叶升力系数与阻力系数,结合桨叶当前姿态角,采用叶素法求得整片桨叶所受的气动力矩;惯性力作用于桨叶质心,其产生原因在于桨叶的转动分析是在桨根坐标系这一非惯性系内进行,其值为FI=mBaB,mB为桨叶质量,aB为桨根坐标系的向心加速度,方向为桨轴中心指向桨根。
2 斜铰旋翼应用方法研究
根据已有的研究[6],斜铰旋翼与传统旋翼的主要区别在于,传统旋翼依靠自动倾斜盘推动桨距角造成桨盘倾斜来改变拉力方向,从而形成对机体的操纵力矩,而斜铰旋翼利用两片桨叶滞后/超前运动形成桨距角,造成拉力差来形成操纵力矩。虽然这种力矩生成方式简化了操纵机构,但也意味着需要重新考虑其操纵力矩的生成规律。
2.1 有效操纵力矩生成规律研究
在旋翼旋转过程中桨叶位置实时变化,这种情况下,斜铰旋翼产生的力矩方向也是一直在变化的。为了使产生的力矩能够对机体进行有效的操纵,期望在一定时间内旋翼每旋转一周生成的合力矩也就是有效操纵力矩的大小与方向在各旋转周期内一致。为了达成期望的效果,需要固定力矩幅值与其相位之间的关系。
以频率5 Hz的正弦转速信号作为上文所建立斜铰旋翼动力学模型输入,旋翼输出力矩如图3所示。
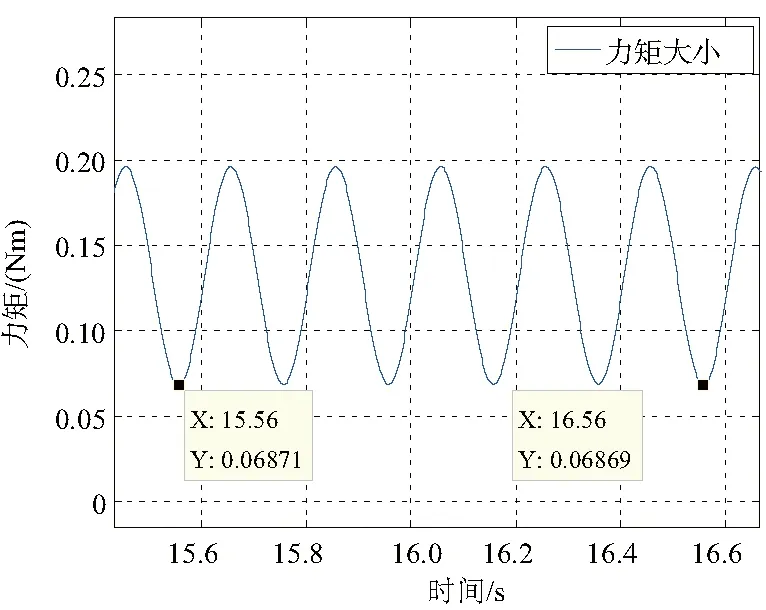
图3 5 Hz波动转速情况下的力矩大小
从图3中可以看出力矩幅值大小出现了与转速同频率的波动,但其并不能对机体产生有效操纵,原因如图4所示。
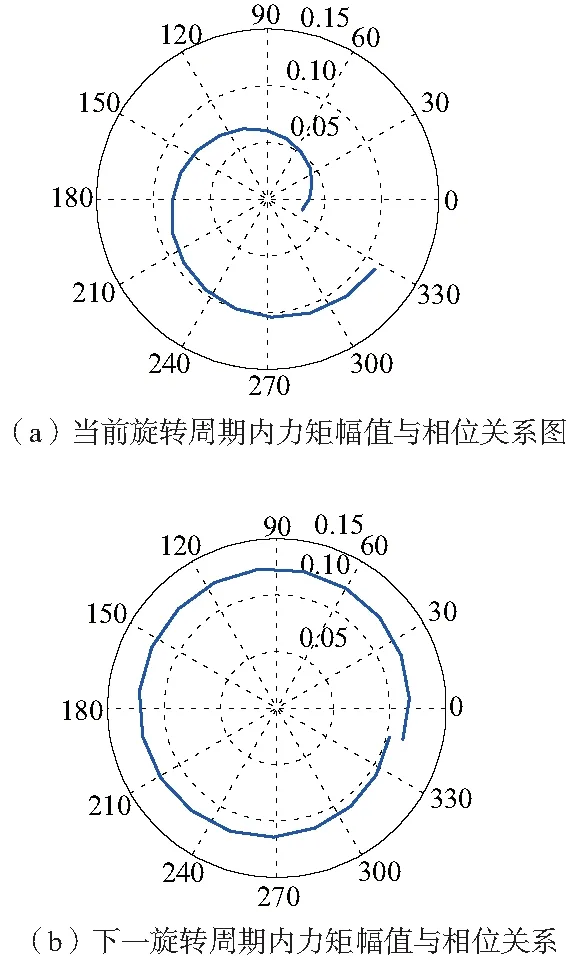
图4 不同旋转周期内瞬时力矩幅值与相位关系
图4展示了相邻两个旋翼旋转周期内产生的力矩幅值与相位间的关系,这种不固定的关系将造成不同周期内的有效操纵力矩方向和幅值不一致,无法持续地形成对机体某一方向上的操纵力矩。
参考传统旋翼周期变距原理,自动倾斜盘保证了在每个旋转周期内,桨叶在相同角度处的变距角是一致的。对于斜铰旋翼,为了固定力矩幅值与相位间的关系,同样需要保证桨叶变距角与转角之间存在固定的关系。由前文分析,变距角波动频率与转速波动频率一致,那么可以合理假设,只要转速波动频率与转速频率(1 s内旋转的圈数)呈倍数关系,变距角与相位之间的关系就是固定的。
为使转速波动频率与转速频率一致,将电机转角反馈至转速控制器,融合后的参考转速指令形式如下式:
Ω=Ω0+Asin(nφ)
(1)
式中:Ω0为基准转速;A为波动转速;φ为电机转角。该指令保证了转速在旋翼旋转一周内完成一次周期变化。首先设n=1,以该指令作为输入进行转角反馈仿真实验,获得了桨轴坐标系xOy平面内的力矩,选取仿真时间25 s~50 s内的数据,瞬时力矩的大小和方向按极坐标形式给出,如图5所示。
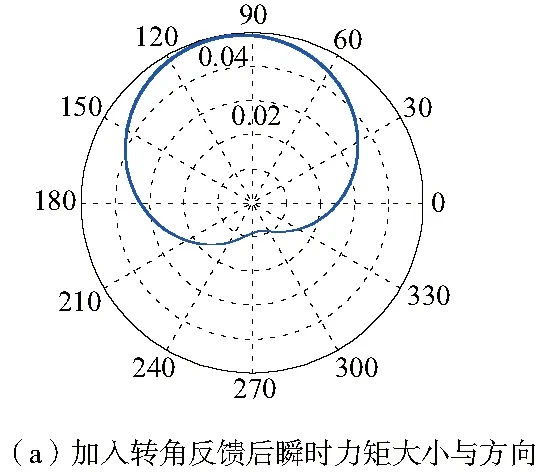
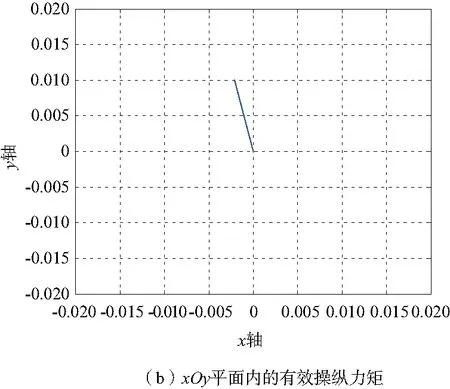
图5 加入转角反馈后的瞬时力矩与有效操纵力矩
从图5(a)可以直观地看出xOy平面左半平面内的力矩幅值明显大于右半平面,图5(b)所表示的有效操纵力矩也证实了这一点。假设机头朝向y轴正方向,这一力矩可以认为是使机身右倾的滚转力矩。
尝试n=2、3,即转速在旋翼一个旋转周期内转速完成了2次和3次周期变化,仿真结果如图6所示。
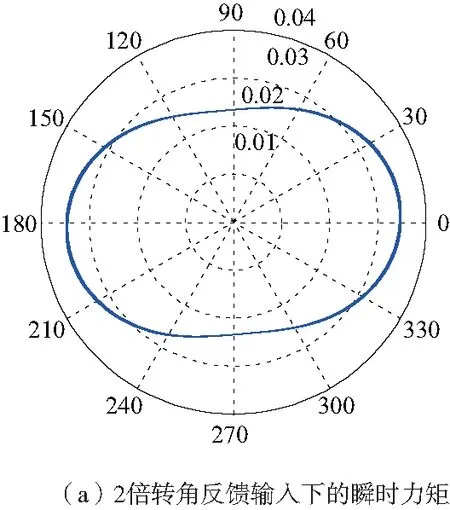

图6 不同转角反馈输入下的瞬时力矩
观察图6很容易发现,随着n的增大,瞬时力矩在极坐标内愈发趋近于圆形,将不能对机体产生有效的操纵。同时,加大转角反馈的倍数会给后续带来控制上的困难,倍数越高,其要求的转速波动频率越高,这对控制器的性能和控制算法均提出了极高的要求,不易于工程实现。通过上述分析与仿真,得到了适合的转速输入信号为
Ω=Ω0+Asin(φ)
(2)
2.2 有效操纵力矩方向控制研究
上节通过仿真分析确定了有效操纵力矩的生成规律,但仅关注了有效操纵力矩的生成。在实际使用中,无人直升机飞行过程中不同的操纵需求还要求能够控制有效操纵力矩的方向,本节将重点探究对于有效操纵力矩方向的控制。
由于斜铰旋翼桨叶姿态受旋翼转动加速度的影响,合理猜测:改变波动转速信号相位能够改变有效操纵力矩方向。因此在转速输入信号中人为加入滞后角φ0,此时转速输入信号形式为:
Ω=Ω0+Asin(φ-φ0)
(3)
固定基准转速Ω0与波动转速A,分别设置滞后角φ0为0°、90°、180°、270°,仿真结果如图7所示。
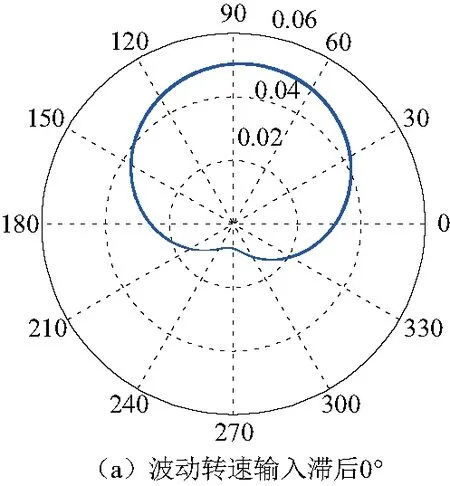
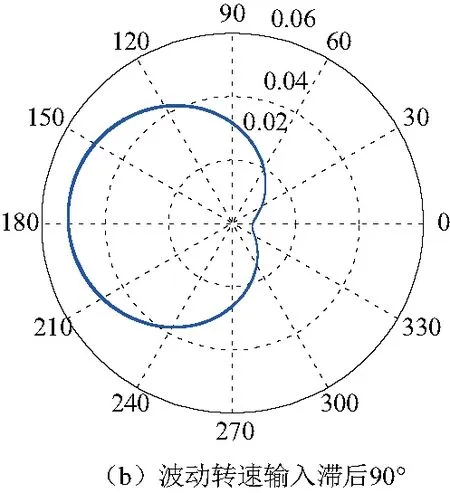
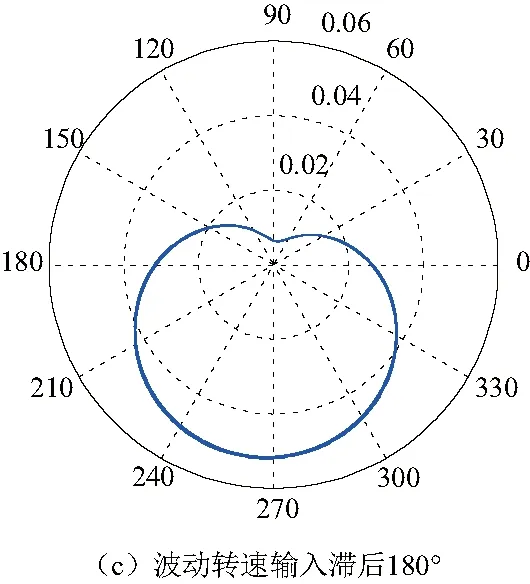
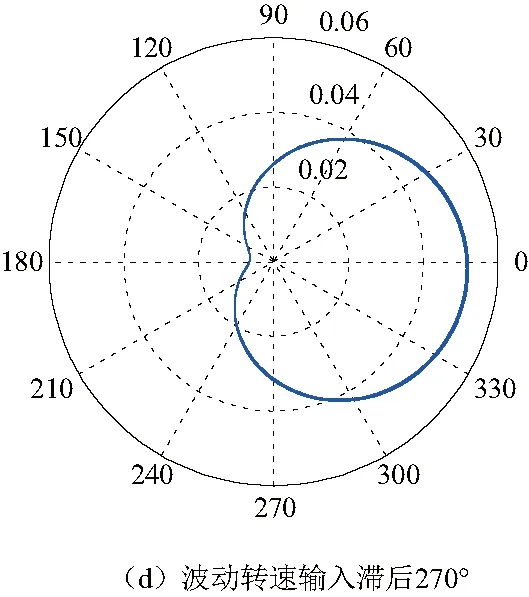
图7 滞后角对力矩方向的影响
从图7可以看出旋翼上生成的力矩均值方向随着转速输入中滞后角的变化而变化,且与滞后角固定存在着90°的超前。该仿真实验验证了输入中加入的滞后角可以有效操纵生成力矩的方向。
3 有效操纵力矩调节规律验证
上节主要讨论了用于产生有效操纵力矩的转速调节规律,本节将考虑旋翼实际应用情况,探讨在不同情况下该转速调节方式的有效性。
由于驱动单元不能直接操纵桨叶位姿,因此桨叶当前的运动状态会对之后的运动产生影响,例如在桨叶分别处于滞后状态和超前状态下同时对电机施加加速指令,虽然桨叶都会因为惯性而产生相对于桨毂的滞后转动,但因初始桨距角不同,在转动相同角度后,两种初始状态下的桨叶桨距角不同,影响生成的力矩。为验证其影响程度进行以下仿真实验:
1)在不同时间点转速闭环输入中加入波动;
2)在不同时间点闭环输入中滞后角阶跃。
仿真实验1):实验开始后旋翼转速进入1200 r/min的稳态,分别在10 s、12 s、14 s、16 s时在闭环输入中加入20 r/min的波动,桨距角仿真结果如图8所示(本刊黑白印刷,如有疑问可咨询作者)。
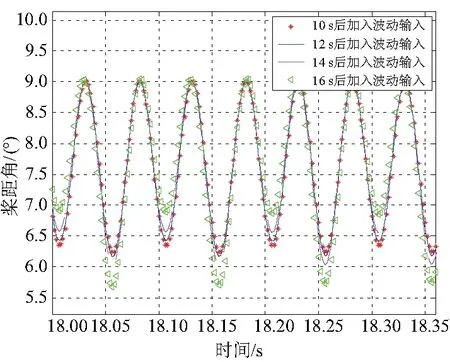
图8 4种输入下的桨距角变化
图8展示了在仿真18 s后上桨叶的桨距角变化情况,可以看出不同时间点加入波动转速会对桨距角幅值产生一定的影响,但其相位始终一致,这样只会对力矩大小产生影响,对于有效操纵力矩的方向无明显影响。
仿真实验2):旋翼初始转速为(1220±20) r/min,0°滞后角,在10 s、20 s、22 s、24 s时加入40°滞后角,上桨叶桨距角仿真结果如图9所示。
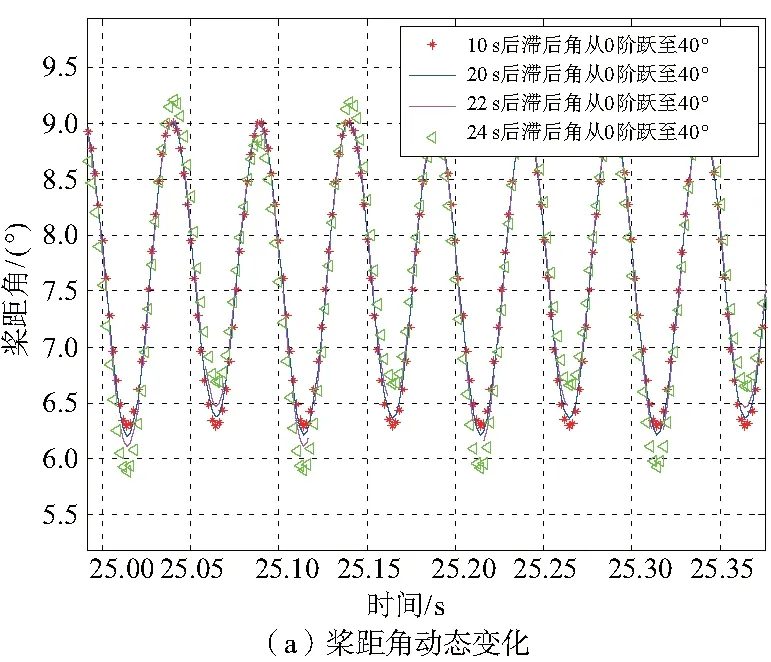
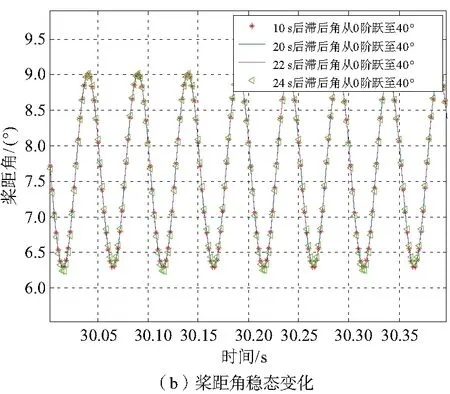
图9 滞后角阶跃导致的桨距角变化
以10 s时滞后角阶跃导致的桨距角变化趋势作为参考,从图9中可以很容易看出:在出现滞后角阶跃后,桨距角的变化存在着一段时间的动态过程,动态过程中桨距角相位相同,仅幅值存在一定的变化,与仿真实验1)结果类似;同时,在5 s内桨距角即可进入稳定的正弦变化,滞后角阶跃开始的时间对于进入稳定变化状态的桨距角无影响。
仿真实验1)模拟了斜铰旋翼直升机从悬停状态转变为前飞或是侧飞状态所进行的旋翼操纵,仿真实验2)模拟了斜铰旋翼直升机任意两次姿态变化间的旋翼操纵。
上述仿真结果说明斜铰旋翼能够快速响应转速的变化,且无论处于何种工作状态,对于相同的输入,斜铰旋翼的响应总是相似的。
4 结语
本文研究了斜铰旋翼的应用可行性,特别是其对于旋翼飞行器机体姿态操纵的能力。首先通过建立斜铰旋翼数学模型,结合对于斜铰旋翼工作原理的分析,得出基于转角反馈的转速调节规律,并通过系统仿真,计算出在此调节规律下斜铰旋翼能够形成有效的操纵力矩。其次,在已有转角反馈的情况下,人为加入滞后角,达到了控制斜铰旋翼有效操纵力矩方向的目的。考虑到斜铰旋翼特殊的操纵方式,其工作状态可能对后续工作状态产生影响,因此考虑实际操纵需要,给出相应的转速输入进行仿真分析。仿真结果表明斜铰旋翼在不同状态下对于相同转速输入的桨距角响应总是相似的,且能很快达成同步。
