GEO/IGSO混合区域导航星座的设计与优化算法
2021-05-21徐哲宇杜兰刘志豪
徐哲宇,杜兰,刘志豪
信息工程大学 地理空间信息学院,郑州 450001
地球同步轨道(GEO和IGSO)具有高轨和对地运动慢变特性,是连续覆盖特定区域(不含极区)的通信、遥感和导航卫星的首选轨道类型[1-2]。基于地球同步轨道的区域卫星导航系统的星座优化布设对实现特定地域的基本卫星导航定位服务至关重要。与全球导航卫星星座相比,区域导航星座的建设成本低、周期短,却能够达到对目标区域的独立导航能力。若进一步拓展为全球导航星座,仍可发挥对重点地区的GNSS导航增强作用[3-4]。目前,建成和在建的具有独立导航能力的区域导航星座有中国的BDS和印度的IRNSS,两者均包含了地球同步轨道的混合星座[1-8]。
导航卫星星座的常用设计方法有两大类。一是基于卫星轨位在惯性空间分布特性的方法,如GPS采用的Walker星座,常见于对空间对称分布有需求的全球导航星座设计[9];另一种则是基于卫星星下点轨迹分布特性的方法,如Flower星座[10]。由于地球同步轨道的星下点轨迹特性简单,因此更适用于相应的区域导航星座的设计方法。
基于GEO和IGSO卫星的区域星座设计已有大量研究。帅平等提出了区域导航星座的半分析式设计方法[11],通过固定其他参数,分析单一参数对导航能力的影响,不足是需要大量的试算确定参数,且不能保证参数的全局优化。曾喻江提出了基于遗传算法的无构型约束卫星星座设计方法[12],可用于通信、导航、遥感等领域的卫星星座设计,但是设计参数无针对性,不适合区域导航星座设计。于亮等参考BD-2设计了一个中国的区域导航星座[13],构型为GEO+IGSO+MEO,但并未对优化参数做一定的约束,存在搜索空间过大的问题。Bidyut B Gogoi等研究了IRNSS星座的优化设计方法[14],但优化参数仅考虑了升交点赤经和相位,方法通用性差。
本文提出一种基于星下点轨迹特性的简化GEO+IGSO区域导航星座设计与优化方法。以服务区域中央经线为基准,提取两类地球同步轨道的星下点表征参数和子星座参数,组合成对称星座构型参数集。考虑扁率摄动长期项的影响构建单星的轨道平根数和星座外推轨道,以服务区内的时空统计GDOP值为优化目标函数,利用差分进化算法对参数进行局部和全局寻优。
1 区域导航星座设计方法
为实现对地不间断重复覆盖,常采用共地面轨迹的星座设计。静地GEO卫星在其覆盖区内始终可见,但是,对于IGSO圆轨道卫星,其星下点轨迹是关于赤道对称的8字曲线,卫星周期运动过程中,覆盖区的南端和北端有可能出现部分时段不可见情况。因此,IGSO子星座常采用共地面轨迹的设计,即同一个8字曲线上布设多颗具有共地面轨迹特性的IGSO卫星,从而实现对地连续覆盖。
1.1 对称星座的构造参数集
区域导航星座的构型参数是基于地球同步轨道的星下点轨迹特性的表征。不失一般性,假定目标区域为矩形区域,且以矩形的中央经线λ0为经度基准。下面分别讨论GEO和IGSO子星座的星下点轨迹的单星表征参数和子星座构造参数。
1)GEO对称子星座。GEO卫星具有静地特性,其星下点轨迹可直接取其定点经度相对于中央经线的经差ΔλG。构型参数为GEO卫星个数NG。若NG为偶数,则令成对双星关于λ0对称,即定点经度分别为λ0±ΔλG;若NG为奇数,则令一颗卫星定点在λ0处,其他卫星按偶数情况放置。
2)IGSO对称子星座。IGSO卫星的8字构型大小和定位由轨道倾角i及升交点与中央经线的相对经差ΔλI决定。构型参数为8字曲线个数N8;8字的对称部署方式与GEO子星座相同。
3)IGSO子星座内的相位参数。同一个8字曲线上均匀布设的卫星个数为NI,这NI个卫星具有共地面轨迹特性,能够实现对地不间断重复覆盖。
4)IGSO子星座间的相位参数。相邻8字曲线间的相位关系,通常取两个8字子星座的首颗卫星之间的初始相位差F。
于是,可以得到包含7类参数的混合对称星座构造参数集{NG,ΔλG,N8,i,ΔλI,NI,F}。
1.2 可变的星座设计参数
星座的构造参数集是确定的,但是对于不同的卫星个数,均可能存在多种对称构型,因此相应的星座设计参数的个数是可变的。
以3GEO+4IGSO的7星星座为例,即使卫星个数已经确定,仍然可以有双8字和四8字的两种对称构型,如图1所示。与双8字相比,四8字的定点位置参数ΔλI多1个,相邻8字的相位差F则多2个。因此,双8字构型2的参数总数为7,而四8字的构型1的参数总数为10。

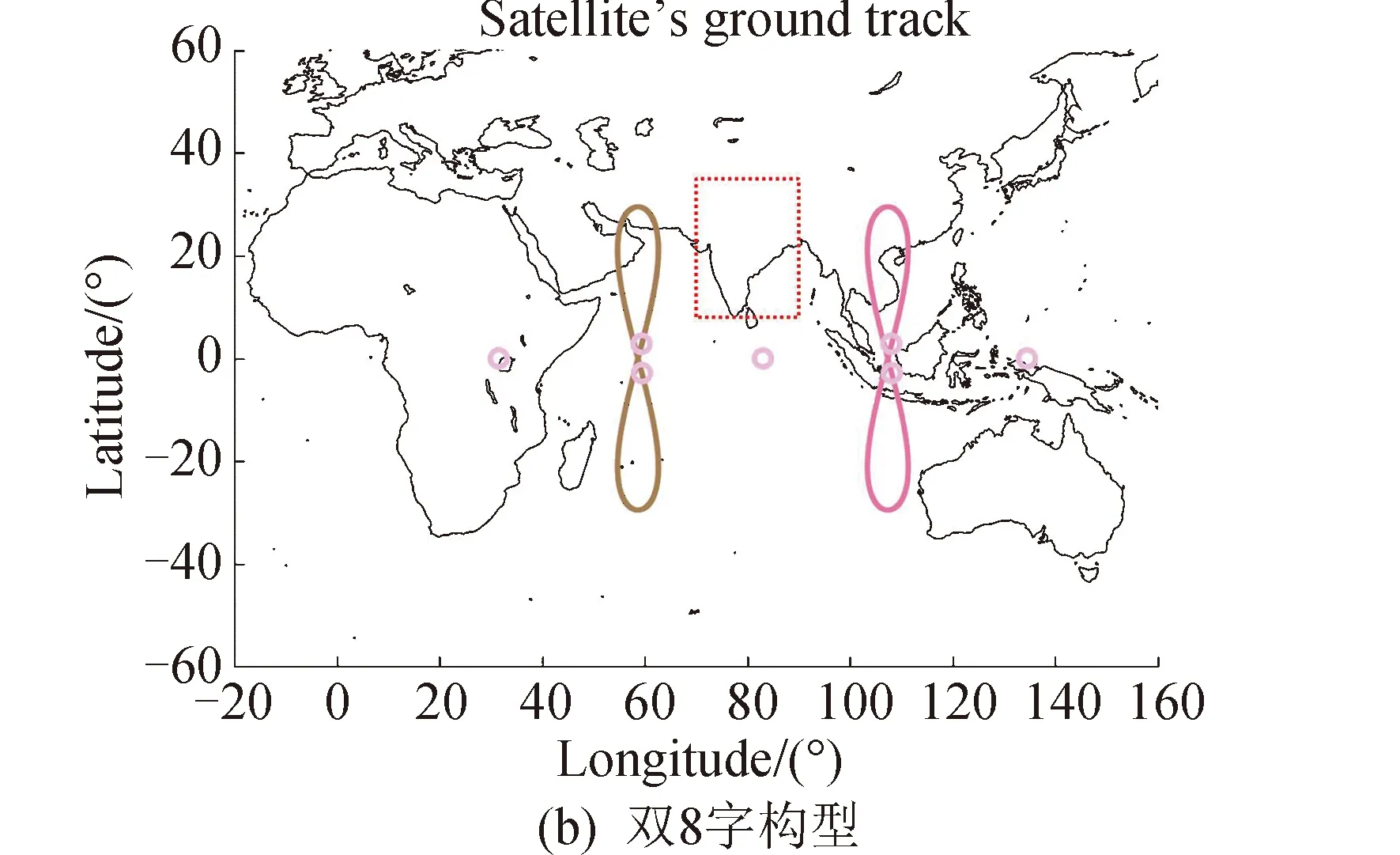
图1 3GEO+4IGSO的两种对称星座构型示意Fig.1 Two configurations for the 3GEO+4IGSO constellation
与无约束的N颗卫星星座的6N个独立轨道根数(如卫星总数为7时总共有42个参数)相比,这种基于星下点轨迹表征的对称星座构型的设计,参数个数显著减少。在保证构型唯一性的前提下,可以大大提升星座构型的优化搜索效率。
1.3 星座参数的轨道计算
对于高轨卫星,主要的摄动力有地球非球形引力摄动、日月引力摄动和太阳光压[15]等,其中地球扁率J2摄动是最大的自然摄动力。在轨道和星座的优化设计阶段,通常仅考虑扁率长期摄动即可满足通用分析要求。
顾及地球引力位J2的长期摄动影响,首先需要把星座构造参数转换为星座卫星的初始轨道根数;其次,轨道外推也要顾及该摄动主项的影响。
基于混合对称星座构造参数集,星座卫星初始轨道根数的计算步骤如下:
1)计算J2引起轨道根数的升交点赤经Ω、近地点幅角ω和平近点角M的一阶长期摄动[16],即
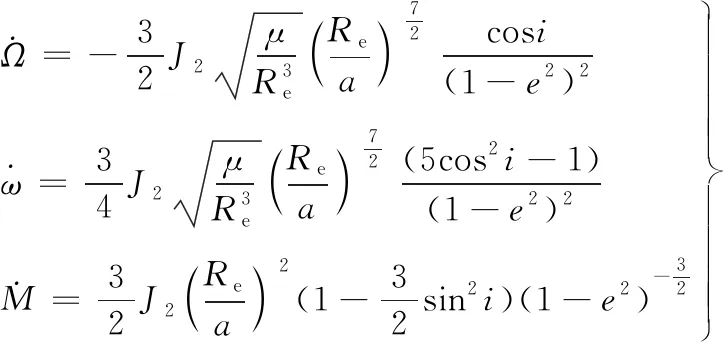
(1)
式中:Re为地球半径;J2为地球的二阶球谐引力位系数;μ为地球引力常数;a、e和i分别为轨道半长轴、偏心率和轨道倾角,若为圆轨道,则e=0。


(2)
通常,利用式(2)解算n和计算a后,需要回代到式(1)更新摄动项,直至迭代收敛。
3)计算GEO和IGSO对称子星座的升交点赤经。令初轨时刻的格林尼治恒星时角为S0,有
式中:∓分别表示中央经线的左和右对称卫星;j表示IGSO的8字曲线上均匀分布的NI个卫星中的第j颗卫星;κ是相位因子,对于左侧的对称子星座为0,右侧为1。
4)计算IGSO对称子星座的平近点角。令MI0和MIj分别表示左右对称8字子星座的第1和第j颗卫星的平近点角,有
其他未特别指明的星座卫星轨道根数,均取值为0。
2 全局优化算法
星座参数优化是指在满足条件的众多星座设计参数X集中,计算单一或多目标函数(也称为代价函数)cost(X),搜索目标函数极值对应的最优参数集的过程。根据搜索的参数范围可分为全局和局部优化算法。若优化参数规模大,全局遍历搜索计算耗时,可充分利用各种成熟的智能全局优化算法。
2.1 附加约束的单目标函数
卫星导航系统的导航性能评价基于服务区内用户的精度衰减因子GDOP。GDOP能够反映用户与可视卫星之间的空间构型几何强度。强度越高,GDOP数值越小。
单点单历元的GDOP计算公式为[24-26]:
式中:qXX、qYY、qZZ和qtt分别表示三维位置分量和时间的方差。
显然,GDOP与目标点位、星座构型及其星下点轨迹运动密切相关。为了客观评定整体服务区的导航性能,将目标区域划分经纬网格,并对导航仿真时段进行离散化,通过统计采样时段内网格点GDOP值来衡量区域导航卫星星座的导航性能。
目标函数以统计GDOP表征。例如,令网格点的权值均为1,目标函数为网格点在采样时间段内的平均GDOP及最大GDOP的加权和,即:
cost(X)=Wmean·GDOPmean+Wmax·GDOPmax
式中:GDOPmean和GDOPmax分别表示各网格点在采样时间段内的平均GDOP和最大GDOP;Wmean与Wmax分别为两者的权。

式中:numS为网格点在采样时间点的可见卫星数; limmax为设置的算法寻优过程中最大GDOP上限;下标t和i分别表示第t个地面采样点的第i个采样时刻。
2.2 差分进化算法
差分进化算法通过生成随机数的方法,以每代最优种群为导向进化,在搜索范围内加速搜索到最优解。初始化生成随机数后通过变异、交叉和选择等环节不断迭代计算,使用目标函数判断种群中的各个个体的优劣。目标函数值越小,个体越优,每次迭代保留最优个体,直至达到终止条件后输出最优解。与遗传算法等相比,具有结构简单、收敛快速、鲁棒性强等特点,被广泛应用在各个问题复杂的求解过程[17-20]。
由差分进化算法建立的星座设计与优化算法流程如图2所示,其中虚线方框内的内容为参数优化部分,方框外为星座计算部分。差分进化算法需要在优化过程前设置好优化参数范围和控制参数,包括种群规模(NP)、缩放因子(F)和交叉概率(CR)[17-20]。使用中需要注意:1)优化参数范围的选取会影响算法的寻优效率,因此需要在优化前通过分析和试算确定合适的优化参数范围;2)该算法是基于实数编码的算法,对于星座参数中的整型变量,自动约束至最近的整数上;3)由于采用随机搜索的方法,每次优化结果可能不同,因此需要执行多次,对比多组优化结果,直至获得最优解[22]。
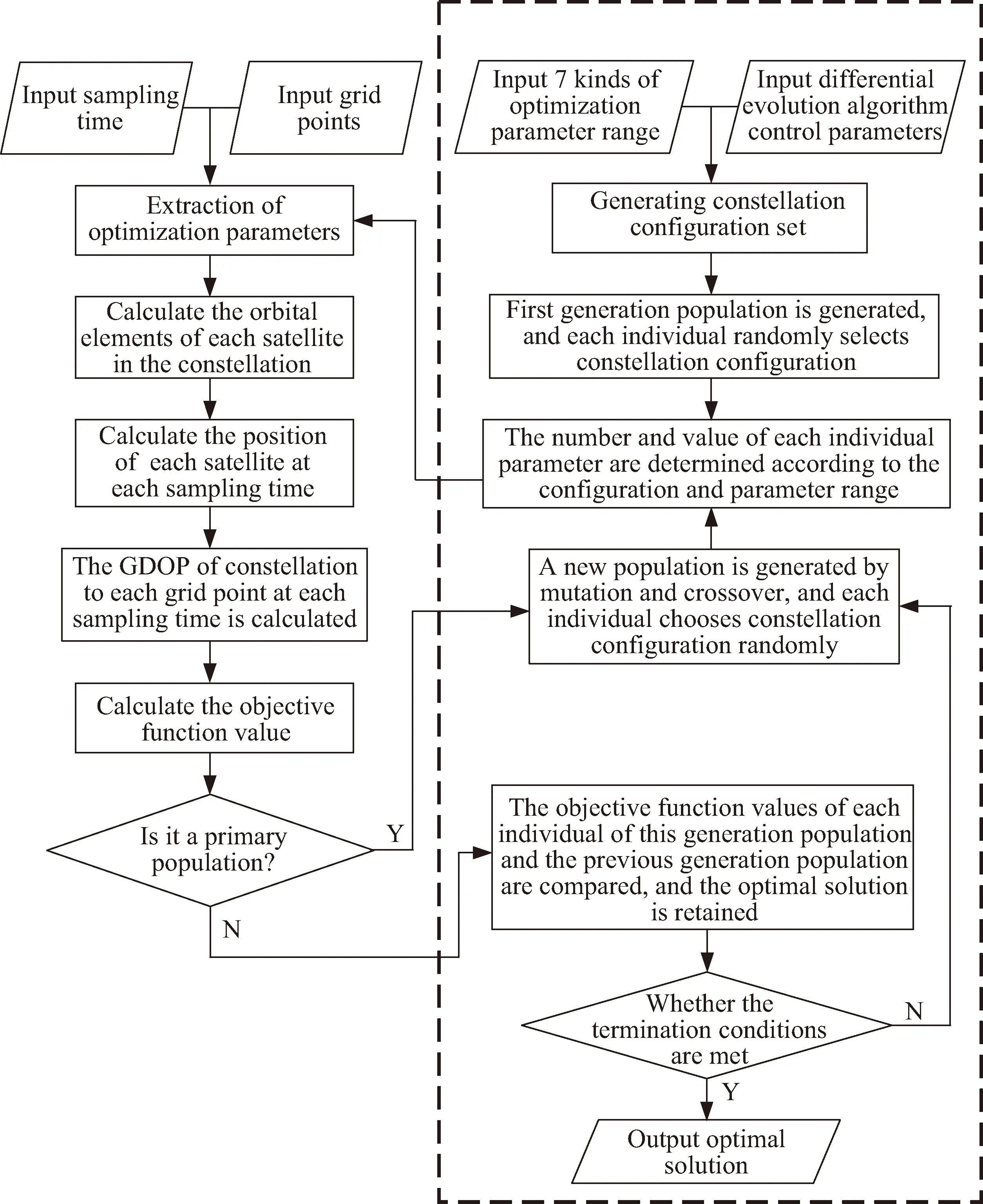
图2 星座设计与优化算法流程Fig.2 Constellation design and optimization algorithm flow
3 星座设计仿真
以印度IRNSS的7星星座为例,设计仿真方案。图3给出了其3GEO+4IGSO构型的星下点轨迹(取自卫星的双行轨道根数),其中4颗IGSO分别组成了两个8字曲线的子星座,每个8字上的两颗星相位相差180°,两子星座之间的相位差接近90°。部分星座参数参见表1。
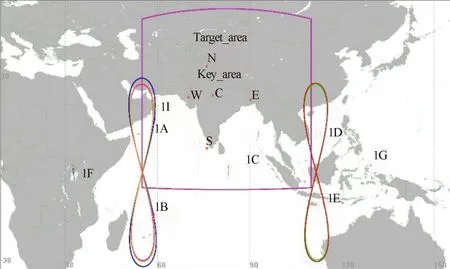
图3 IRNSS的标准7星星座的星下点轨迹和导航服务区域(实线方框)Fig.3 The ground track of constellation of IRNSS and the navigation service area (full line square)
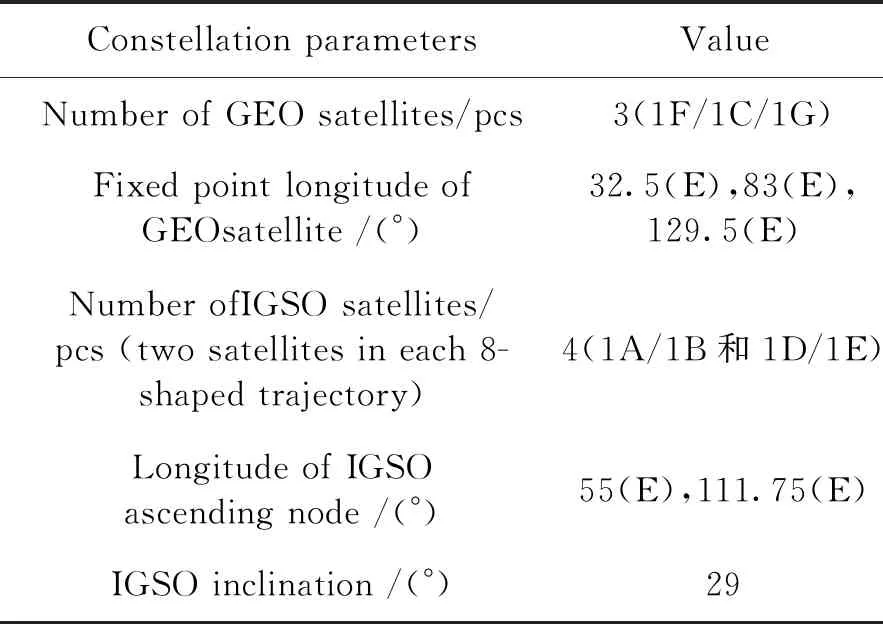
表1 IRNSS星座参数[28-31]
图3中,实线矩形方框内是IRNSS的导航服务区[28-29],即55°(E)~110°(E),5°(S)~50°(N)。在卫星截止高度角5°条件下,标准星座要求满足:1)目标区域各网格点在考察时段内GDOP最大值小于设置的最大值;2)5个指定采样点的平均GDOP达到表2的要求[27]。
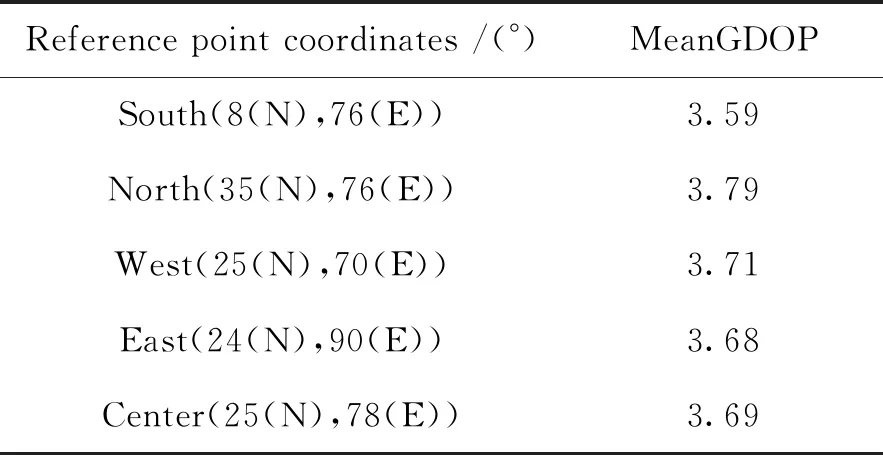
表2 指定采样点及其GDOP要求
在图3中,可进一步细化IRNSS的导航服务区。将5个指定采样点围成的包含印度本土区域定义为重点区域(70°(E)~90°(E), 8°(N)~35°(N)),即图中的虚线方框区域,其外部称为周边区域。
由于摄动力影响,实际轨迹与标称参数略有差别,GEO卫星还需要定期进行定点保持机动[23]。此外,1I卫星是最新入轨的第8颗卫星,与部署最早的1 A卫星距离较近,猜测应是后者的备份星。
3.1 仿真方案设计
设计了以下3种星座优化方案:
1)局部优化的标准7星星座,验证算法的正确性。参照其3GEO+4IGSO星座构型,仅对卫星的升交点经度、IGSO轨道倾角与8字相位排布进行局部寻优,即优化参数的搜索范围设置在标准IRNSS的星座参数附近。若最优参数集能使星座达到IRNSS性能指标,则视为优化算法可行。
2)全局优化6/7/8星导航星座。固定星座卫星总数分别为6、7、8,参照IRNSS的导航目标区域和性能指标,采用文中设计方法,全局优化参数集为{NG,NI,N8,ΔλG,ΔλI,i,F},参数搜索范围扩大,实现对各种构型的寻优。
3)对比椭圆IGSO轨道的导航性能。采用方案2全局优化7星星座构型,将其中IGSO卫星的圆轨道改为椭圆轨道。因为目标服务区绝大部分位于北半球,这里固定近地点角距ω为270°,并在方案2的基础上新增一个优化参数,即IGSO卫星的近地点高度hp。
为提高搜索效率,对各仿真优化参数的取值范围进行了合理约束,如表3所示。

表3 星座参数寻优范围
3.2 优化目标函数
仿真时间取1 d,起始时刻为2020年4月1日0时(UTC),采样率120 s。因为星座卫星均为天回归周期轨道,1 d仿真时段能够反映区域导航性能。
优化目标函数为1 d内服务区全部格网点的平均GDOP和最大GDOP之和的最小值。目标区域以5°间隔划分格网,共计121个格网点参与计算。
DE优化算法的参数设置为:变异环节采用DE/rand/1/bin模式,控制参数NP为300,F为0.5,CR为0.1,最大进化代数设置为300代。
3.3 优化结果及其分析
3.3.1 方案一
采用本文的优化目标,局部优化能够搜索出基本一致的IRNSS标准7星星座。从表4和图4(a)可以看出:1)2个IGSO子星座构型关于中央经线两侧对称分布,子星座间相位差近90°,其中升交点经度偏离约2.12°,轨道倾角比标准参数高0.64°。2)GEO卫星构型为居中GEO与中央经线经度一致,左右2颗对称分布,定点经度偏离约2.5°。总体来看,优化参数与标准参数接近,优化算法可行。优化参数值的偏差,应该是使用了不同的优化目标函数所致。

表4 方案一优化参数结果
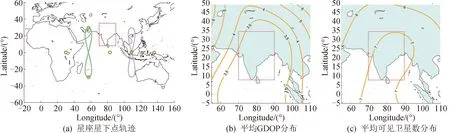
图4 标准7星星座的局部优化结果与导航性能Fig.4 Local optimization results and navigation performance of standard constellation
图4还给出了局部优化的标准星座的导航性能。可以看出,重点地区(内虚线框)的平均GDOP绝大部分在3.5以内,大部分地区7星均可见;周边地区的平均GDOP基本控制在6以内,大部分地区平均可见星数6颗。
表5分别统计了两类地区以及5个指定点的GDOP值。显然,重点区域的GDOP值较为均匀一致,最大和平均GDOP接近,均小于4;与表2的标准星座相比,5个指定点的平均GDOP均优于设计指标10%。但是,周边服务区的东北和西北一带,导航性能下降幅度大,最大GDOP超过10。
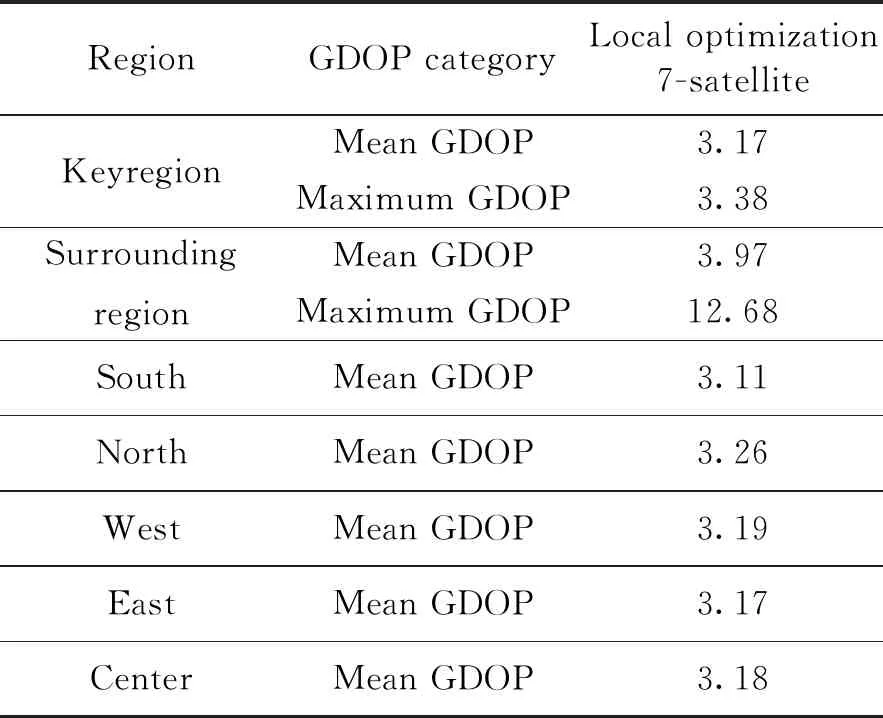
表5 方案一优化结果GDOP统计
3.3.2 方案二
放松星座优化参数约束,大范围寻优得到6、7和8星优化星座。首先,7星优化星座的构型相同,但是星座整体上更为外扩。由表6的第二列和图5(a)可知,2个8字的倾角抬高了约3°,距离中央经线远了5°,左右GEO卫星的定点位置也均外展了16°。
图5和表7(第二列)给出了全局优化7星星座构型和导航性能。与图4的局部优化星座相比,由于全局优化星座的整体构型范围增大,即使重点区域的平均可见卫星数从7颗减少为6颗,仍能保证重点区域的平均GDOP小于 3.5。
但是,对于最大GDOP值统计,两星座差距显著(见表5和表7第三列)。IRNSS对于重点地区控制严格(<4),而全局优化星座则达到8,且重点和周边地区基本一致。分析其原因,应该是IRNSS在优化目标函数中对重点和周边地区的导航性能设置了不同权重,因此,IRNSS的IGSO轨道倾角更低,GEO定点位置和IGSO的8字曲线均更紧凑,是重点针对印度地区的最佳构型。而本文对全部服务区统一要求平均GDOP和最大GDOP最小。
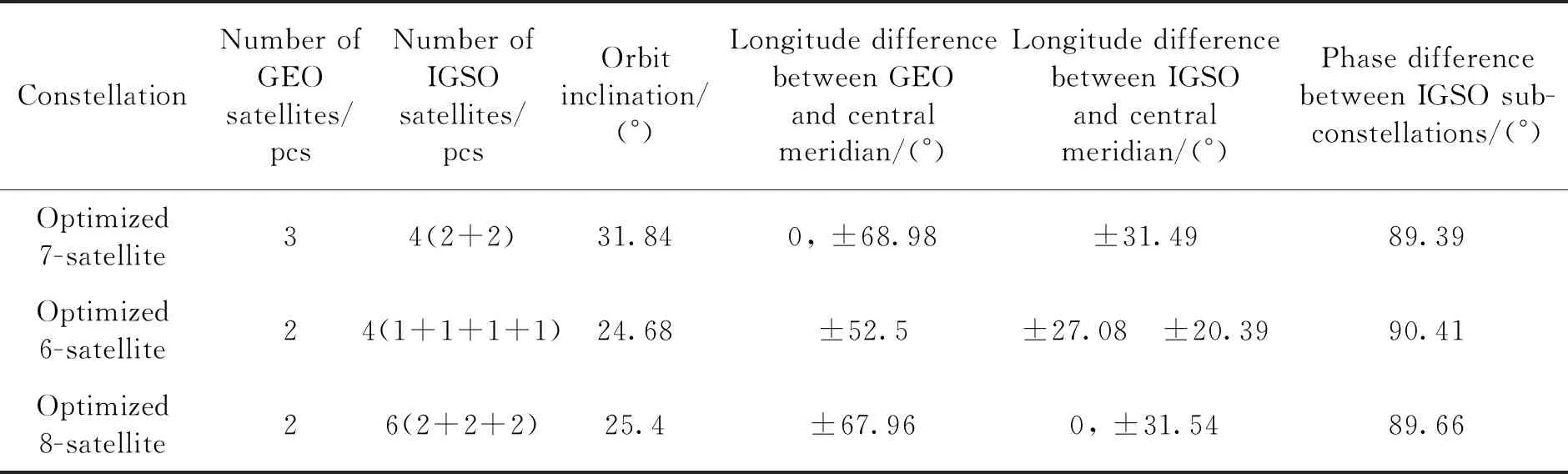
表6 方案二优化参数结果
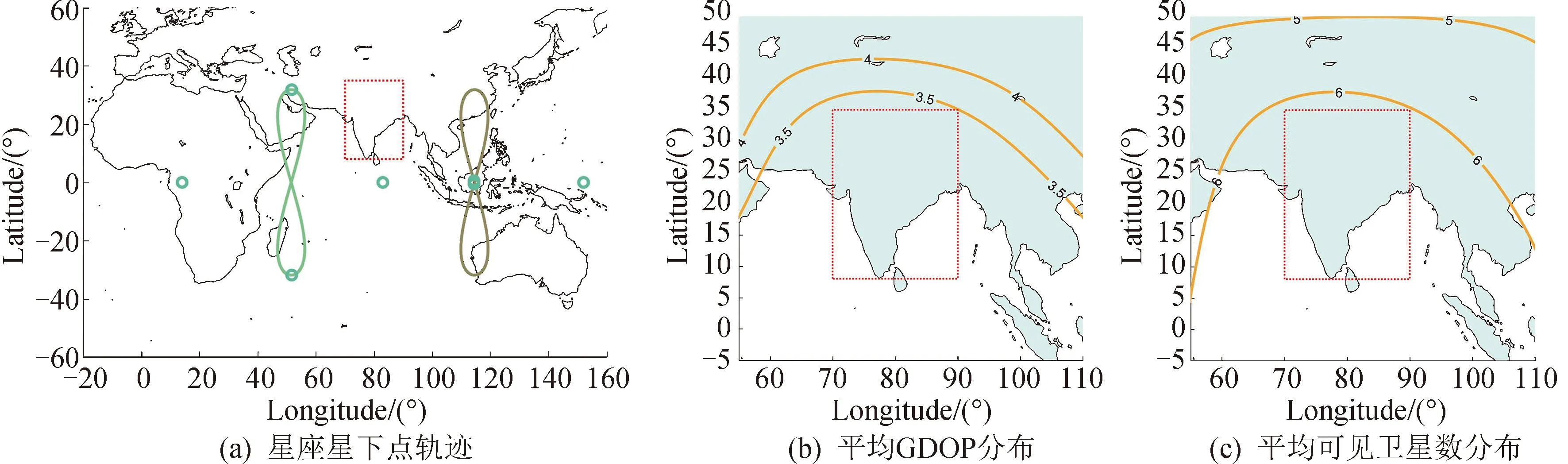
图5 优化7星星座分布与导航性能分析Fig.5 Global optimized 7-satellite constellation distribution and analysis of navigation performance
此外,7星优化星座比6和8星星座更高效。由表7可知,与7星星座相比:

表7 方案二优化结果GDOP统计
1)6星星座的整体GDOP指标劣化严重。平均GDOP翻倍,极端条件下最大GDOP甚至超过250,5个指定参考点均无法满足精度要求(参见表2)。
2)8星星座对导航性能提升效果不显著。8星星座更多表现在最大GDOP的较大改善,最大GDOP下降幅度50%左右,但是平均GDOP整体改进不大。
因此,权衡星座建设成本与导航性能,7颗星座是最佳选择。
3.3.3 方案三
此方案考察IGSO椭圆轨道对北半球导航性能的影响。由表8可知,采用椭圆IGSO后,优化星座构型相同,但IGSO的轨道倾角更大,星座的星下点空间分布更为松散,2个8字地面轨迹的首颗卫星相位差不再是90°左右,这与椭圆轨道在北半球有更长的停留时间和地面轨迹南北不对称有关。
图6绘制了优化椭圆的7星星座构型和对目标区域的导航性能。可以看到,重点区域的平均GDOP小于3.5,平均可见卫星数6颗,周边区域的导航情况相较于7星圆轨道,有较明显的改善。
从目标区域GDOP情况来看(参见表9),采用椭圆轨道后,目标区域总体的导航性能有所提升。最大GDOP下降较为明显,导航性能可靠性有所改善。
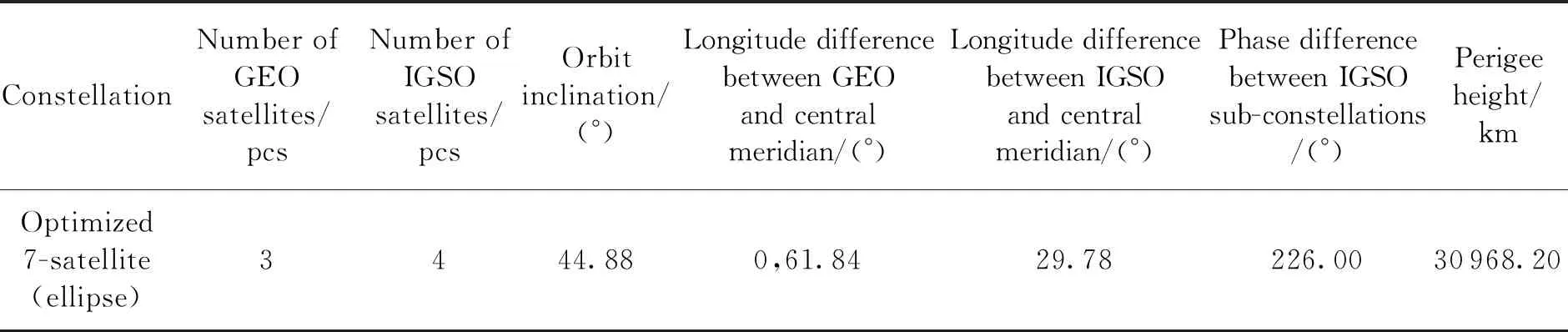
表8 方案三优化参数结果

图6 优化7星椭圆星座分布与导航性能分析Fig.6 Optimized 7-satellite elliptical constellation distribution and analysis of navigation performance
此外,IGSO采用椭圆轨道,对南半球GDOP的影响较大。由图7可以看出,相较于圆轨道星座的对称性,椭圆轨道星座在南半球的导航能力随纬度增加迅速劣化。因此,若印度计划将IRNSS星座卫星数和导航服务区进一步拓展,采用椭圆轨道星座对南半球区域不够友好。此外,椭圆轨道受摄动影响存在拱线进动的问题,也会增加卫星轨道维持机动的频率,增加运营成本。
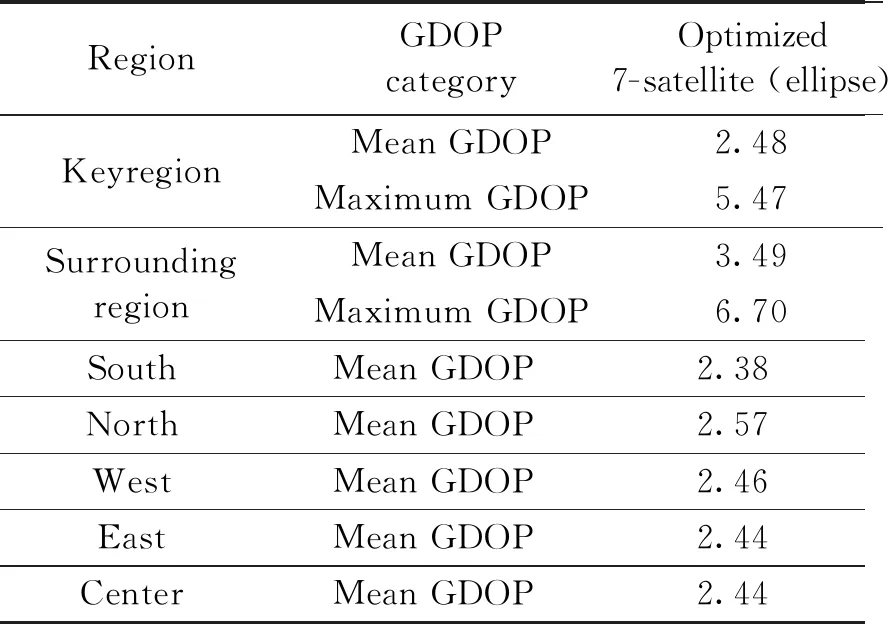
表9 方案三优化结果GDOP统计
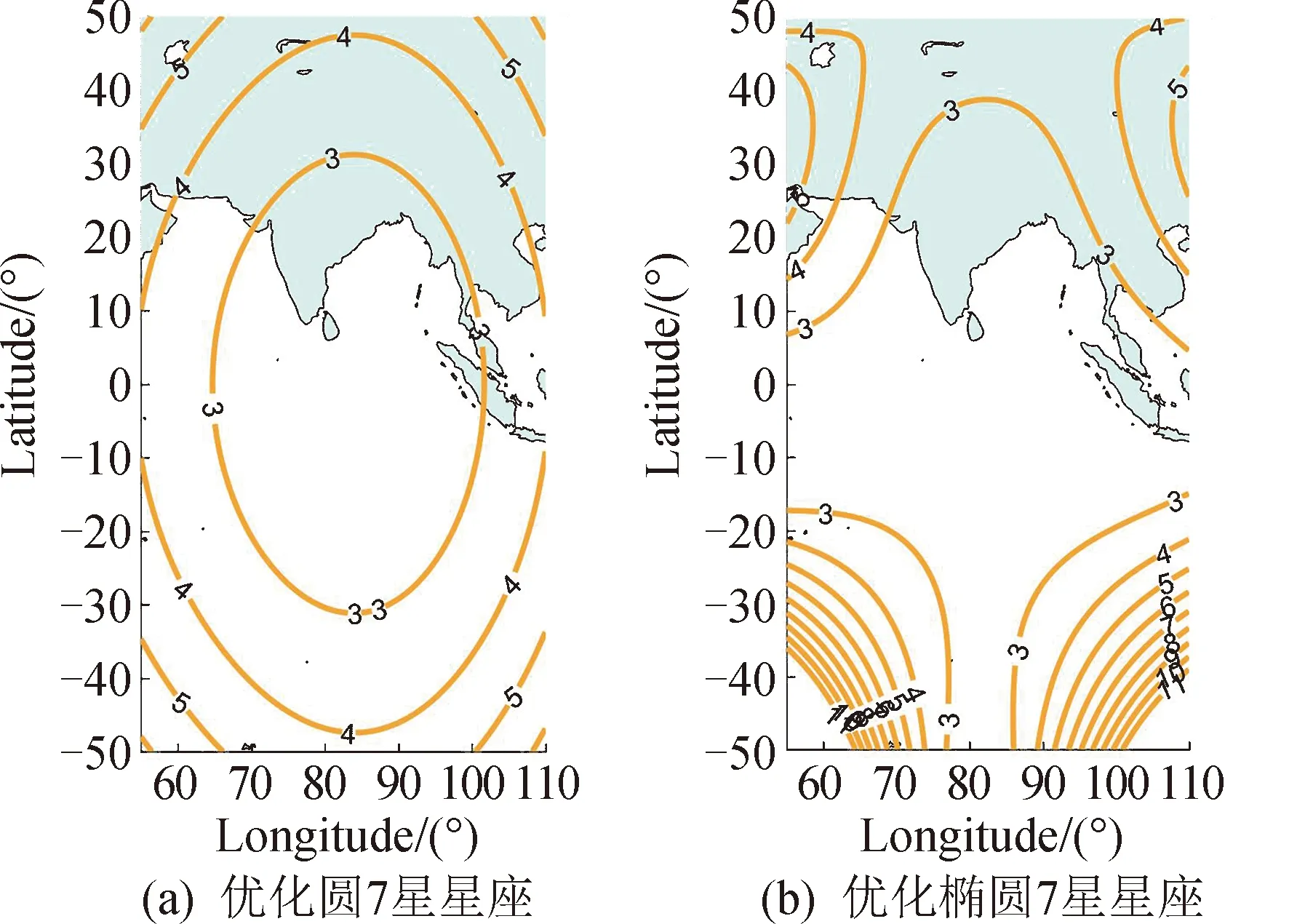
图7 优化7星圆轨道与椭圆轨道星座南半球平均GDOP对比图Fig.7 Comparison of the average GDOP of the southern hemisphere between the optimized 7- satellite circular orbit and the elliptical orbit constellation
4 结束语
GEO和IGSO卫星对地覆盖区域大,星下点轨迹紧凑,适用于区域导航星座的设计与建设。本文提出了一种基于GEO和IGSO星下点轨迹参数的区域导航星座设计方案。以统计GDOP为目标函数,结合差分进化算法建立优化模型,通过设置合理的优化参数,使星座的星下点轨迹以目标区域中央经线为轴对称分布。对称星座对目标区域的覆盖更合理,减少了优化参数数量,有效缩小了星座构型的寻优范围。
参考印度IRNSS星座的目标区域和定位精度指标,设计仿真方案验证了本方法的可行性。计算并分析了目标区域中的重点、周边地区和5个指定参考点的GDOP情况。优化结果表明:1)简化的对称星座构型与官方设计构型基本一致;2)6星星座导航性能太差,无法使用,8星星座对导航性能提升有限,在权衡成本和性能的情况下,7星星座最佳;3)星座中的IGSO卫星若采用将远地点设置在北半球的椭圆轨道,可以改善星座在北半球的导航性能,但对中低纬地区贡献不显著。
需要说明的是,IRNSS星座并非严格对称的,这表明其服务区的导航性能需求是有一定地域差异的。因此,下一步工作是针对不同地区的导航需求,通过调节区域格网点GDOP值的权重,开展非对称星座的局部优化调整。
