基于模糊神经元PID 算法的注塑机注射速度控制算法研究
2021-05-19赵一鸣戚嘉辉胡燕海
赵一鸣,王 壮,戚嘉辉,胡燕海
(宁波大学 机械工程与力学学院,浙江 宁波 315211)
在注射速度的经典控制方面,浙江大学王喆[5]对液压驱动螺杆移动速度的非线性特性进行分析,根据油压变化速率设计出注射速度的非线性分段数学模型,并构建预测模型,实现了注射速度的闭环控制.在智能控制方面,模糊控制、迭代学习控制、神经网络控制等主流方法能很好地解决注射速度非线性、时变等问题.华南理工大学张智恒[6]设计了一种基于DSP 的液压机全数字注塑速度控制器,利用低分辨率adc 提高注射速度精度.新加坡国立大学Tan等[7]针对注射速度提出一种新的复合控制方法,前馈控制采用迭代学习控制(ILC)算法来补偿非线性与未知的扰动,PI 反馈控制用于注射速度稳定控制,并推导了非线性数学模型,但是其仿真结果是基于其所构建的一阶数学模型,由于数学模型的局限性,致使此控制器无法运用到实际生产中.浙江工业大学崔彩莲等[8]运用A 型ILC控制,首先制定连续的预期学习规则与离散的预期学习规则,分别设计了连续控制器与离散控制器;接着基于Gao 等[9]构建的注射速度数学模型,分别对所设计的控制器进行仿真研究,结果表明所设计控制器抗干扰能力与跟踪能力皆优于D 型、P 型ILC,但仿真数学模型为线性数学模型,难以用于实际生产.
本文基于更贴合实际生产的四阶数学模型描述注射速度,运用模糊控制使具有自学能力的神经元PID 算法中的各参数(比例效率、积分效率、微分效率、比例系数)在线完成自调整,一方面能提升控制算法的效率,另一方面可以提升注射速度的稳定性并减少响应时间.根据所推导的非线性数学模型求出注射速度的传递函数,将所设计的模糊神经元PID 控制器运用于注射速度的传递函数,从而构建出注射速度的新型传递函数.
1 新型控制器的设计
1.1 神经元PID 控制器的设计
神经元模型本质上为数学逻辑与作用函数,采用不同的函数可设计不同功能特点的神经元模型.通过分析注射速度的实际生产情况以及具有自学与自调整功能的神经元,可以实现在线调整PID 控制器中相关参数的能力.神经元PID 控制器一方面能更为准确地控制注射速度,使其鲁棒性得到提高,另一方面可以提高整个控制系统的适应能力[10].
由于Hebb 学习法则可进行无监督学习,并能根据训练集的情况提取其特性,本文利用Hebb 学习法则对神经元的权值进行在线调整.在控制注射速度的过程中,PID 控制中的变量是目标值与实际值的差值e(k)及相邻差值之间的差值e(k)-e(k-1),将权值算法修改后,可得到神经元PID 控制器:
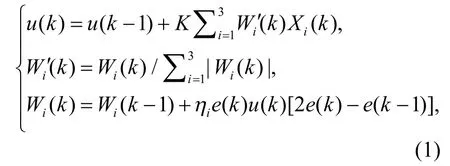
式中:u(k)为第k次实际反馈结果;K为比例系数;X1(k)=e(k)-e(k-1),X2(k)=e(k),X3(k)=e(k)-2e(k-1)+e(k-2);W1(k)、W2(k)、W3(k)分别为比例权值系数、积分权值系数、微分权值系数(i=1,2,3);η1=ηP为比例效率,η2=ηI为积分效率,η3=ηD为微分效率;e(k)为期望结果与实际反馈结果的差.
然而,K值的大小将决定系统的响应时间与稳定性:K值过小将增加系统的响应时间;K值过大将易产生超调量且致使系统稳定性下降.W1(k)、W2(k)、W3(k)各权值的学习神经元控制器中权值系数的数值由各权值的学习效率决定.注射速度控制系统开始调试之初,积分效率ηI与微分效率ηD应选取较小值,比例效率ηP应选取较大值.随着注塑速度趋近目标值,比例效率ηP逐渐减小,积分效率ηI与微分效率ηD逐渐增大;若注射速度出现超调量,应逐渐减小比例效率ηP与积分效率ηI;若注射速度响应时间过长,应逐渐降低微分效率ηD,逐渐增加比例效率ηP与积分效率ηI[11].掌握了各参数对注射速度的影响,就为下一步构建控制器奠定了基础.
通常情况下,根据实际生产经验、仿真结果等大量数据确定神经元PID 控制中的神经元比例系数K、比例学习效率ηP、积分学习效率ηI、微分学习效率ηD等参数,且确定后的参数在整个生产或者实验过程中是固定值,因此不能根据随时会产生变动的参考值对注射速度进行灵敏度高且精度高的控制[12].接下来引入模糊控制器,使其能实时调控K、ηP、ηI、ηD等参数,达到高精度、高灵敏度的模糊神经元PID 控制.
1.2 模糊控制器的设计
模糊控制对非线性系统有很好的控制效果.在数据库与规则库的基础上,模糊控制可分为模糊化、模糊推理、去模糊化(清晰化)等3 个步骤,如图1 所示.
基于上述要求,笔者采用灰色系统理论进行预测系统算法设计。该理论以信息部分明确、部分不明确的灰色系统作为研究对象,采用灰关联分析法对系统进行分析,用数据处理的方式寻找数据间的规律,通过数据的灰色生成,可将杂乱无章的系统行为数据整理为随机性弱化、规律性强化的新序列,进而实现对系统未来行为的推测和预判[14-17]。
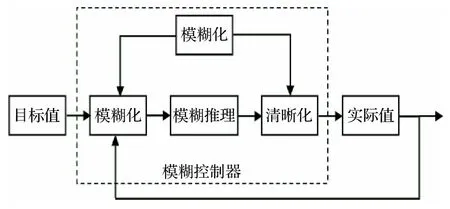
图1 模糊控制流程
模糊控制器通过目标注射速度与实际注射速度的差值E以及差值变化率EC一层层实时推理出神经元比例系数K、比例学习效率ηP、积分学习效率ηI、微分学习效率ηD等参数.定义{NB,NM,NS,ZO,PS,PM,PB}数据集为E与EC的子集,数据集中的元素分别代表负大、负中、负小、零值、正小、正中、正大.考虑实际生产中注射速度的数值范围,选定差值E的取值区间为[-40,40],比例因子为0.3,模糊论域为[-8,8];选定差值变化率EC的取值区间为[-7,7],模糊论域为[-5,5].设定模糊数据集{Z,S,M,B}为实时输出变量比例系数K、比例学习效率ηP、积分学习效率ηI、微分学习效率ηD的子集,数据集各元素分别代表从0 依次增大的数值.设定比例系数K的取值区间为[-1,40],模糊论域为[0,40];设定比例学习效率ηP的取值区间为[0,500],模糊论域为[-10,600];设定积分学习效率ηI的取值区间为[0,8],模糊论域为[-2,10];设定微分学习效率ηD的取值区间[0,150],模糊论域为[-10,140].设定三角函数同为模糊控制器的输入函数与输出函数的隶属函数,期望值与反馈值的差值E隶属于所设定的曲线[13],如图2 所示,分析注射速度与所设计控制器,去模糊化(清晰化)时运用重心法[14].
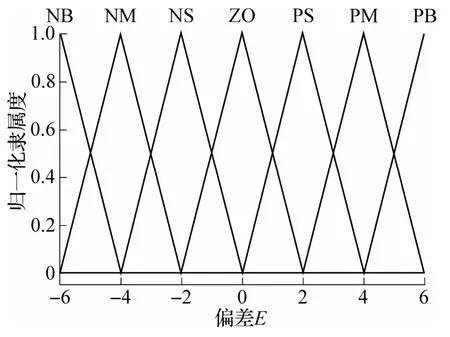
图2 差值的隶属曲线
上文已经设定各参数具体数值、取值范围、论域以及去模糊化方法.神经元比例系数K、比例学习效率ηP、积分学习效率ηI、微分学习效率ηD的模糊控制见表1.将模糊推理及去模糊化后所得的参数输入神经元PID 控制器中,然后对被控对象进行控制.模糊神经元PID 控制器控制注塑机注射速度的框图如图3 所示,其中r(k)为期望值,u(k)为输入值,y(k)为输出值.
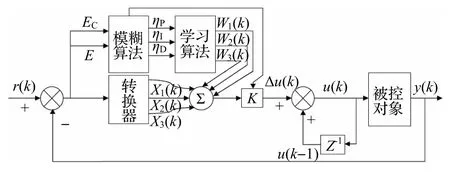
图3 模糊神经元PID 控制器框图
2 注射速度系统数学模型的构建
图4 为所研究注塑机注射系统原理图,注射系统包括伺服阀、压力传感器、液压马达、位移传感器、旋转编码器、换向阀等,其中伺服阀芯的位置与方向直接决定注射螺杆的移动速度与移动方向,注射螺杆的移动速度又直接决定注射速度的大小,压力传感器获取的压力值与旋转编码器获取的伺服电机转速作为反馈值传输至伺服驱动器.经过对注射原理的分析,本文选择伺服阀芯位置作为速度控制系统的控制量[15].
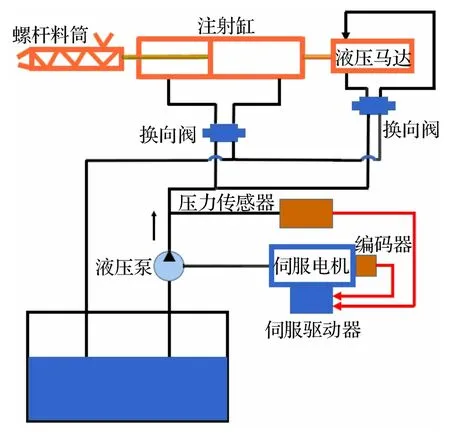
图4 注塑机注射系统原理
2.1 伺服阀数学模型的构建
在构建伺服阀数学模型时,经常采用不同的方法对伺服阀模型进行辨识,例如脉冲响应法、参数优化法.本文伺服阀系统为伺服电机与内啮合齿轮泵动力系统,此系统为二阶系统,电流作为输入值,阀门流量作为输出值,可得传递函数:

式中:Q0为空载流量;为流量增益,其中Qn为额定流量,Ps为实际油压值,Psn为额定压降,Isn为额定电流;ωv为阀角频率;ςv为阻尼系数.
2.2 注射缸数学模型的构建
注射缸为液压驱动,其工作原理如图5 所示.根据牛顿第二定律,忽略其他非线性影响,可得注射缸运动的微分方程:
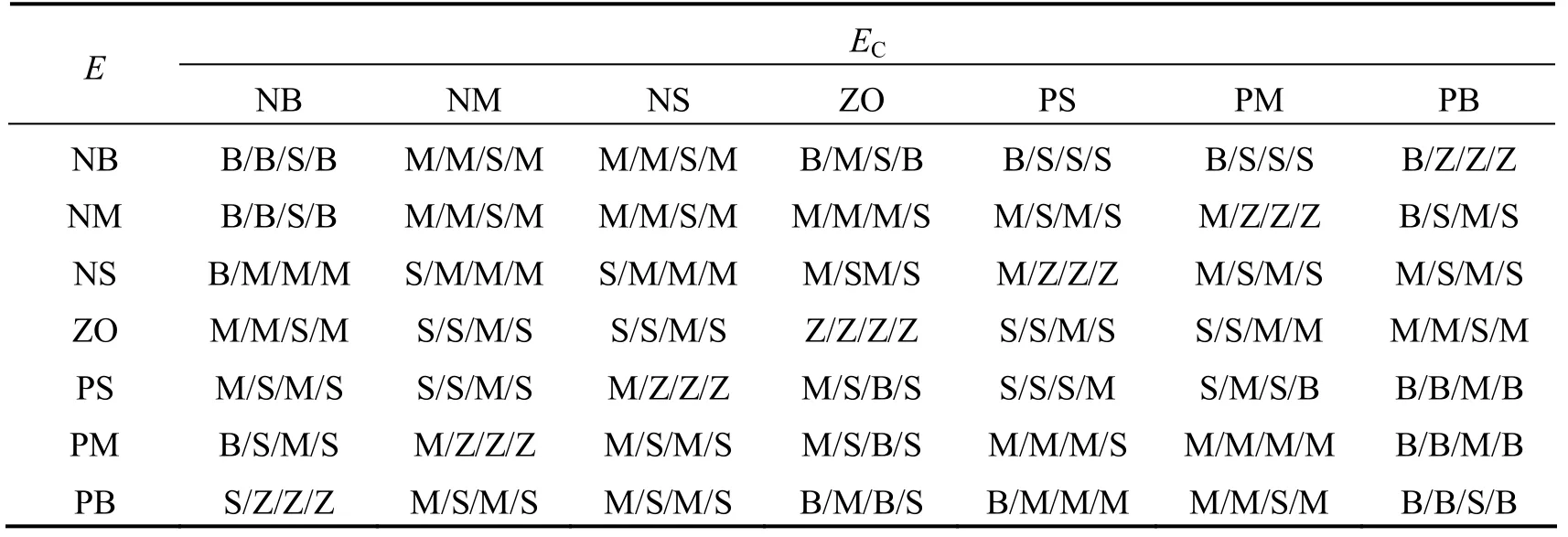
表1 K、ηP、ηI、ηD模糊控制表

式中:A为压强的有效作用面积;P为驱动液压缸运动的内部压强;v为注射活塞运动速度;B为阻尼系数;Fl为外部负载.
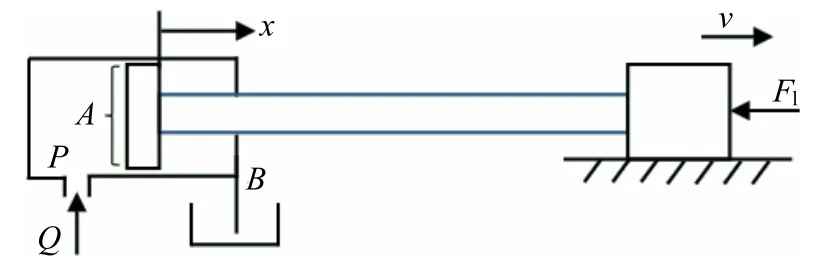
图5 液压缸工作原理
注入液体Q改变缸内两边体积从而驱动注射杆运动,根据液体总流量守恒,可得微分方程:

式中:Q为缸内总流量;Cl为密封系数;Va为液体实际体积;β为液体等效体积;为螺杆运动时液体在缸内的体积变化率.
将式(3)、(4)分别进行拉氏变换后可得复数域中的函数:
将式(5)代入式(6),可得:
若负载Fl为0,则液压缸的传递函数为:
2.3 注射速度数学模型的构建
根据已构建的伺服阀传递函数与注射缸传递函数可得出注射速度的传递函数:
采用阶跃函数对注射速度系统传递函数中的参数进行辨识,辨识结果如下:
3 仿真实验
运用MATLAB Simulink 对采用模糊神经元PID 控制器控制注射速度进行仿真,根据上述理论分析、生产经验、仿真分析经验确定比例权值系数Kp=3.5、积分权值系数Ki=2、微分权值系数Kd=2为参数的初值,仿真时间为5 s,注射速度目标值为15 mm·s-1.通过Simulink的仿真结果可知,由模糊神经元PID控制器控制的系统参数:响应时间为0.08 s,超调量为1.21%,稳态时间为0.2 s,3 s 时加入的干扰经过0.15 s 的短暂振荡后趋于平稳.为验证本次所设计的控制算法的优越性,给出了传统增量式PID 控制的Simulink仿真结果.设置同样的仿真时间、采样间隔、注射速度目标值、干扰信号(幅值与施加时间),由传统PID 控制器控制的系统参数:响应时间为0.15 s,超调量为26.6%,系统稳态时间为1.4 s,在3 s 时加入的干扰经过1.8 s 振荡后趋于平稳.仿真对比结果如图6 所示,由图可知,针对注塑机注射速度的控制所设计的模糊神经元PID 控制器性能远优于传统增量式PID 控制器.
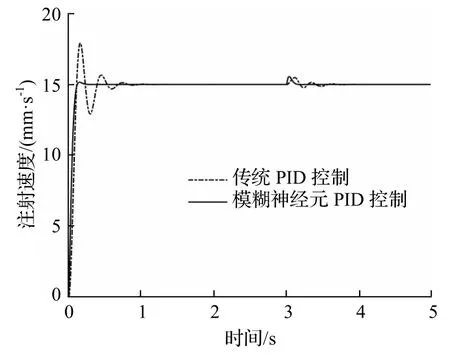
图6 模糊神经元PID 控制及传统PID 控制对比结果
4 结论
通过仿真实验可知,相比于传统增量式PID 控制器,本文针对注塑机注射速度系统所设计的模糊神经元PID控制器具有较强的自适应能力,且抗干扰能力强、超调量极小、响应迅速、稳态时间较短.故此模糊神经元PID 控制器对于此系列注塑机注射速度的控制有着较为理想的控制效果.