Indra 二次雷达速度跳变分析处理
2021-05-07
(民航云南空管分局,云南 昆明 650200)
0 引言
我国民航事业迅猛发展,航班量显著增长。以云南管制区为例,随着昆明长水国际机场投入运行,旅客及货邮翻倍增加,云南空中管制安全保障压力日益增长。在巨大的航班量和安全压力下,稳定可靠的雷达监视信号质量对管制部门就至关重要了。
目前,全国有22 套西班牙INDRA 公司20 MP/L MODE-S 单脉冲二次雷达应用在空管系统,仅云南管制区就有3套。对该雷达目标速度相关故障分析及排查,对类似问题排查可提供思路及借鉴。
1 Indra 二次雷达目标速度跳变情况概述
云南某雷达站Indra 二次雷达在S 模式和A/C 模式下均出现部分目标速度跳变情况,该站点切换雷达工作通道故障现象无改善。
雷达目标速度跳变范围从20 Nm/h 至1 200 Nm/h 随机出现,其中,个别雷达目标除航班速度跳变外,还出现目标分裂、位置倒退的情况。如图1所示。
2 二次雷达目标速度测算原理

图1 速度跳变目标航迹图
航迹跟踪是基于天线扫描到扫描之间的航迹和点迹之间的相关处理实现的。不断测量一个目标的位置,将点迹和航迹文件中的航迹进行相关处理,并进行平滑滤波,才能连成航迹[1]。继而计算出目标的速度和航向,外推出航迹的未来位置,这一系列的处理称之为跟踪。能够在天线不断扫描过程中对几十批或更多的目标实行跟踪,是边跟踪边扫描(Tracks-While-Scan)系统的任务。
完成跟踪后,计算出目标速度。简单理解为在一个更新周期(4 s)内前后两个点之间的位移量(距离矢量)与更新周期(4 s)的比值即为速度。
3 故障排查思路
3.1 航迹跟踪处理部分排查
根据二次雷达测速原理,首先排查航迹跟踪处理相关板件,切换雷达工作通道,速度跳变未改善。并更换航迹跟踪处理相关板件MCPU 板及询问脉冲产生单元MICA03板,目标速度跳变情况均无明显改善。
因Indra 雷达航迹跟踪处理相关板件数据读取自SLG(本地监控)系统,前期排除板件后,以另一雷达站SLG(本地监控)系统软件(另一雷达站目标速度正常)镜像为基本,修订相应本地参数,制作雷达站新SLG 系统,重启加载数据,观察目标速度跳变情况仍无明显改善。
综合以上两点,排除因航迹跟踪处理板件异常导致雷达目标速度跳变,并且推断速度计算错误是因为目标位置探测出错导致的。
3.2 目标探测部分排查
在自动化终端与其他站点雷达数据对比,覆盖区域内目标与其他站点雷达目标位置基本一致,其中距离、高度一致,未见明显异常。该站点雷达提供一部分目标速度与其他站点不一致点,存在跳变现象。
因覆盖区域内目标与其他站点位置基本一致,可得知该站点雷达对航空器应答码处理过程正常,雷达与目标之间距离处理过程正常。为进一步分析目标速度跳变原因,选取部分平飞目标,从方位、方位差、速度、速度差以及点迹情况进行记录。如表1所示。
通过数据统计,可见当一个点不准确时,会导致与下一个点间的偏差过大,当目标方位信息发生较大摆动时,目标速度也会联动的发生跳变。观察航迹则直观地反映出目标在方位上的不准确导致整个航迹不均匀及不平滑。
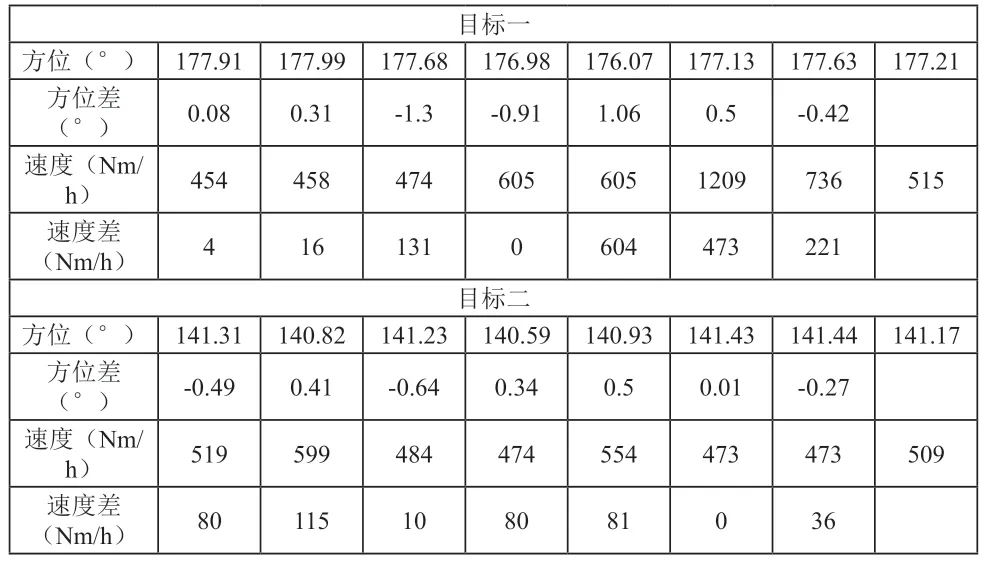
表1 平飞雷达目标数据统计表
综上所述,基本确定该雷达速度跳变是因该雷达方位探测不准确引起。下一步重点为排查方位探测几个因素。
3.3 方位探测要素排查
Indra 二次雷达使用单脉冲测角技术获取目标的方位信息。单脉冲测角技术获取目标方位需要三个要素,即天线波束指向角、目标偏离瞄准轴角度和符号信息。其中,天线波束指向角,由天线编码器给出;目标偏离瞄准轴角度,可使用归一化差信号,通过和差比的幅值信息得出目标偏离瞄准轴的信息(OBA);符号信息,即目标相对于瞄准轴偏左或偏右的信息,可通过测试和信号与差信号之间的相对相位关系来确定。目标方位与天线波束指向角和偏离角度的关系如图2所示。

图2 单脉冲测角示意图
由此可得:
目标方位(Target Azimuth)=天线波束指向角(Antenna Azimuth)±偏离角(ΔAzimuth)。
分析得知,如天线波速指向角偏差会造成所有雷达目标方位均造成同样偏差。因该站速度跳变为部分目标,且在同一时间跳变目标的方位变化无定向规律,实际操作中切换雷达编码器,目标跳变无改善,也印证了天线波束指向角偏差不是导致速度跳变的成因。
由符号信息(瞄准轴偏左或偏右的信息)偏差造成所有雷达目标方位均造成同样规律,因该站速度跳变为部分目标,且在同一时间跳变目标的方位变化无定向规律,该原因造成速度跳变概率低。因此,下一步排查重点为目标偏离瞄准轴角度构成要素。
3.4 目标偏离瞄准轴角度排查
单脉冲检波器接收Σ/Δ 信号生成单脉冲视频,最终以量化电压值表示,其中,Σ/Δ 信号的幅度比值表示目标偏离天线瞄准轴角度的大小,最终以单脉冲电压值的大小来表示。
具体来看,在Indra 雷达本地监控终端SLG 上,由归一化的差信号强度得出单脉冲表。单脉冲表是在雷达设置在常规模式下,录取器对150个独立无干扰目标统计结果的平均值。单脉冲表中的数值,即量化电压值,是数值化的单脉冲视频与ACP 脉冲数的关系,单位为1/4ACPS。量化电压值的大小对应目标偏移瞄准轴的角度的大小;量化电压值前面+/-符号,即表示目标位于天线瞄准轴的左侧或右侧。
如图3 所示,最左列数值表示数字化单脉冲视频,即量化电压值;右边数值对应1/4ACP 的个数,可以由此计算偏离角度。比如,量化电压值+1005,对应的1/4ACP 个数为+152,计算可得ACP 个数为+152*(1/4A CP)=+38ACP,则对应角度计算+38*360o/16384=+0.8o,即偏离角度为为+0.8o。

图3 Indra雷达OBA表
分析得知,和(Σ)通道核心功能为探测目标有无,差通道核心功能为探测目标相位。台站使用台站原SLG及普洱SLG 均无法生成新OBA 表,目标数一直为0。由此判断Σ/Δ 信号的电气相位特性已经异常。因雷达目标除方位及速度其他数据均无明显异常,可判定和通道无异常。
当差(Δ)通道的相位异常抖动和变化时,如果目标恰好在瞄准轴一侧抖动则会导致速度计算错误,速度跳变。当抖动跨过瞄准轴,则引入超过180°的相差,就可能导致目标倒退、分裂等异常情况。因此,可确定此次目标速度跳变原因为差通道相位异常。
3.5 差通道排查及处理
差波束用于询问机实现单脉冲功能,通常Indra 系统工作范围为天线视轴附近2.3°内,天线视轴有效宽度为5.6°[2]。天线端和波束的相位是相同的,而差波束天线主瓣两侧的相位不同,并且左边的相位相对为+0°,右边的相位相对为+180°。如图4所示。

图4 差波束水平方向图
在雷达信号接收过程中,目标产生的1090 MHz 应答信号经天线的和(Σ)、差(Δ)与控制(Ω)通道同时接收,经旋转铰链、射频切换开关和TRA 单元,送往接收机。在接收机中,和信号与差信号送到单脉冲检测器,由此得到单脉冲视频信号。具体来讲,目标1090 MHz 应答信号经射频放大、滤波,与1030MHz 本振信号混频,产生60 MHz 中频信号;60 MHz 中频信号,经过中频放大、中频滤波,再经GTC 控制,而后和差(Σ/Δ)信号送到单脉冲检测器,产生单脉冲视频信息。
因切换通道,故障现象无改善,故排除TRA 单元及之后双通道部件,排查重点放置于旋转铰链、射频切换开关、差通道馈线及各链接头等公共部分。
旋转铰链后端断开馈线连接,馈线前端连接假负载,使用网络分析仪(安利2034B)测试于TRA 前端-旋转铰链后端差通道驻波比,驻波比为1.116。并检查天线端至TRA 各链接头均紧固,无松动现象。使用网络分析仪对比测试和、差通道相位差,相位差为6.97°,满足Σ与Δ 线缆的相位是7°固定差值。由此可排除差通道馈线及各链接头原因造成该现象。
使用网络分析仪(安利2034B)测试射频切换开关,该部件外观未见异常,对比各通道相位,无明显相位差,由此可排除射频切换开关因造成该现象。
使用网络分析仪测试旋转铰链,该部件外观未见异常,对比和、差通道相位差,每旋转90°测量一次其绝对值分别为7.15°、4.25°、9.18°、2.96°。因旋转铰链Σ 与Δ 通道相位是配平的,超过标称值≤3°,且四个方位值不一致。因此可以判断差通道相位异常是由旋转铰链引入的。现场更换旋转铰链后OBA 表顺利重新生成,目标速度跳变消失,雷达探测功能恢复正常。
4 结束语
本次故障排查以雷达目标生成的原理,建立排查速度跳变故障总体思路。思路为速度计算软、硬件排查及雷达目标探测两条线路。排查中按操作难易程度,从简至繁逐步排查。逐步得到因旋转铰链老化引起差通道相位异常导致雷达目标速度跳变。随着Indra 雷达使用年限增加、部件老化,将遇到更多新问题,我们雷达机务员应踏实以原理为基础,结合故障现象梳理排查思路,逐一细致排查,以期尽快排除故障,为管制部门提供稳定可靠地雷达监视信号以提高航班正常率和飞行安全。
