手机GNSS数据质量提取的变分模态分解法
2021-04-28朋子涵高成发刘永胜张瑞成
朋子涵,高成发,刘永胜,张瑞成,尚 睿
东南大学交通学院,江苏 南京 211189
全球导航卫星系统(Global Navigation Satellite System,GNSS)是获取位置信息最重要的手段之一,广泛应用于定位和导航中[1-2]。目前,手机、平板电脑和共享单车等设备大量采用了低成本GNSS芯片。当观测环境较好时,低成本GNSS芯片可获得2~3 m的定位精度,当观测环境较差时,由于多路径影响,精度仅能达到10 m左右[3]。文献[4—5]利用手机GNSS天线获得的观测数据进行定位试验,结果表明可以获得厘米级定位精度。该结果说明利用手机GNSS观测数据进行高精度定位有较高的可行性。
2016年5月,谷歌 I/O会议上宣布用户可以在Android Nougat系统中获得原始的手机GNSS观测数据。文献[6]首先利用Samsung Galaxy S7手机进行原始数据分析和定位试验,证明采用手机载波数据可以获得分米级定位精度。文献[7]利用VADASE(variometric approach for displacements analysis stand-alone engine)方法对华为P10手机数据进行定位试验,得到了分米级的定位精度。文献[8]利用Nexus 9平板数据进行相对定位试验,最终得到了厘米级的定位精度。文献[9—10]将RTK算法应用于手机定位,数据试验结果表明其平面和高程定位结果分别优于0.7和3 m。文献[11]改进了精密单点定位模型,实现了亚米级定位精度。文献[12—13]利用精密单点定位模型针对不同型号手机进行了试验,也得到了类似的结果。考虑手机GNSS数据性质,文献[14]分别采用三阶差分滤波和三阈值滤波定位模型进行手机单点定位试验,对Nexus 9手机的测试表明其可以得到亚米级定位结果。文献[15—17]研究了动态情况下的定位,同样可以得到较为理想的结果。
手机GNSS芯片数据质量相对于测地型接收机差距明显,文献[18—20]对其进行了分析。文献[21]指出,由于多路径效应影响,手机GNSS数据载噪比相对测量型接收机减小了11 dB,仅相当于接收机信号功率的8%。文献[22]对多种手机进行测试,得到了类似的研究结果。此外,文献[23]的研究结果表明,载噪比和伪距噪声相关,载噪比越大伪距噪声越小。对手机载波数据质量研究结果表明,载波数据质量受到占空比(duty cycling)影响,当观测存在占空比时,载波数据质量明显变差[22,24]。在伪距残差计算方面,各研究均采用站间单差方法,而对于载波观测值残差计算,目前计算方法包括两种。第1种方法是三阶差分法[3,22],首先计算载波双差(double-difference,DD)观测值,再通过三阶差分的方法计算卫星的观测残差。第2种方法是历元间差分法,即首先计算双差载波观测值,再进行历元间差分[16]。但是,以上两种方法结果中均受到时间相关性和卫星相关性影响,不能准确代表单颗卫星在单历元的载波噪声。
文献[25]利用变分模态分解对GNSS数据进行分解融合试验,证明了结合变分模态分解(variational mode decomposition,VMD)在GNSS信号处理方面的有效性。本文采用变分模态分解的方法对手机GNSS观测噪声进行提取:首先计算手机双差观测值,利用变分模态分解对双差观测值进行分解;然后将提取的低频成分回代,计算各卫星的站间单差观测值;最后计算各卫星的伪距和载波观测残差。利用小米8手机观测数据进行试验并分析各系统观测值质量,最后进行定位试验。
1 变分模态分解原理与计算步骤
1.1 变分模态分解计算原理
变分模态分解是一种自适应、非递归的信号处理方法[26]。基于模态分解理论,信号由不同的模态组合而成,分解的目的就是得到组成信号的本征模函数(intrinsic mode function,IMF)。从一个简单的信号分解问题出发,假设信号f是由原始信号f0和零均值高斯噪声n组成
f0(t)=f(t)+n(t)
(1)
离散情况下,由于待估的原始信号和噪声结果总量大于信号观测量,因此无法同时求解。上述问题属于病态性问题,可以利用吉洪诺夫正则化方法对其进行计算,方程式为
(2)
式中,α表示正则化参数。利用傅里叶变换将式(2)转换至复数域,并展开为泛函进行极值求解,具体过程如下
(3)
(4)
(5)

从以上公式可以看出,f相当于从f0部分过滤了高频部分,公式计算结果相当于低通滤波。
1.2 计算步骤
变分模态分解的目标是将信号f分解为指定数量K的模态分量uk,每个模态的稀疏程度取决于其在频率域内的带宽,即数据主要集中于中心频率ωk。为了实现分解目标,整个分解过程应在如下框架内进行[26]:
(1) 对于每个子态uk,其边际谱由希尔伯特变换计算得到。
(2) 每个子态的频谱均可以用调谐的方式转换至中心频率附近。
(3) 子态的带宽可以通过高斯平滑进行估计。
类似于式(2),分解方法可以通过以下的正则化公式表示
(6)

L({uk},{ωk},λ)=
(7)
采用交替方向乘子法对上述拉格朗日函数进行迭代求解。迭代过程可以得到指定数量的中心频率以及频谱集中于中心频率的IMF。子态在迭代过程的结果可表示为
(8)
利用Parseval/Plancherel傅里叶变换将式(8)转换至频率域,计算结果为
(9)
(10)
2 基于VMD的手机GNSS信息提取方法
对于接收机r和卫星s,频率i上的伪距和载波观测方程如式(11)所示[22]
(11)

为减小卫星轨道误差和大气误差的影响,采用短基线方法进行残差计算。但是需要说明的是,由于手机多路径效应对其观测值质量影响较大,站间差分时不能直接舍去多路径误差项。站间差分观测形式为
(12)
对式(12)进行计算时,若同时估计接收机端误差和卫星端误差,法方程列秩亏,需要选取基准对式(12)进行分解。选取参考卫星R观测值作为基准,其他卫星观测值可表示为以下形式
(13)

(14)
直接通过最小二乘法拟合式(14)中的未知参数即可获得各卫星伪距和载波观测值计算残差。但是,由于式(14)中未知参数个数较多,拟合结果会吸收观测值中的高频噪声部分。因此其计算残差不能准确代表伪距和载波观测噪声,具体表现为上述方法计算所得的观测值噪声小于观测值实际噪声。

(15)
将其代入式(13),并顾及测站坐标已知,即式中的单差几何距离可以消除。联合参考卫星单差观测值,有
(16)
综上所述,结合VMD的手机数据质量提取步骤如下:
(1) 将手机与接收机近距离同步观测,组成短基线观测数据。
(2) 对观测数据进行预处理,逐历元选择参考卫星,并计算双差观测值。
(3) 对双差观测值进行VMD分解,回代分解结果中的低频部分,计算各卫星的站间单差观测值。
(4) 根据历元内各卫星的站间单差观测值计算数据残差,统计观测精度。
3 VMD分解效果检验
为验证VMD对信号的分解效果,首先利用模拟信号对VMD分解进行检验。借鉴文献[25]的分解检验方法,分别采用含噪声、不含噪声和非连续信号3种情况对VMD进行检验。
3.1 不含噪声的模拟信号
模拟信号由3个子信号组成,频率分别为0.01、20和480 Hz。分别代表低频分量、中频分量和高频分量,用来判断VMD对模拟信号的分解效果。各子信号的计算公式为
(17)
原始信号图像和经过VMD分解后的结果如图1所示。其中,图1(a)为原始信号,图1(b)为VMD分解后的IMF,图1(c)为各IMF对应的频谱。从分解结果中可以看出,在模拟信号比较“干净”的情况下,VMD可以十分准确地对原始信号进行分解。
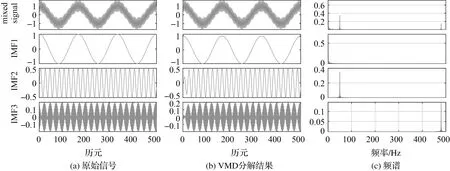
图1 无噪声模拟信号的分解结果 Fig.1 Decomposition result of analog signal without noise
3.2 包含噪声的模拟信号
在原始信号中加入白噪声,噪声幅值为0.1,信号计算公式为
S=S1+S2+S3+0.1×rand
(18)
原始信号和分解结果如图2所示。从图2中可以看出,虽然各IMF的幅值在一定程度上会受到噪声的干扰,但是VMD总体上来看还是能够准确地提取各频率的子信号。

图2 含有噪声模拟信号的分解结果Fig.2 Decomposition result of analog signal with white noise
3.3 包含间断信号和噪声的模拟信号
将子信号S1替换为间断信号,信号计算见式(19)
(19)
原始信号和VMD分解结果如图3所示。从结果中可以看出,VMD分解结果基本不受到中断信号的影响。

图3 间断模拟信号分解结果Fig.3 Decomposition result of discontinuous signal
通过3种模拟信号对VMD分解的检验可知,VMD能够较好地适应各种情况下的信号分解且能够得到较为准确的分解结果。结合上文分析可知,手机GNSS双差观测值中不仅包含观测噪声,而且很有可能还包含其他已知或者未知的未建模误差影响。考虑到未建模误差的低频性质,采用VMD对其进行提取具有可行性。
4 手机GNSS观测值质量分析
4.1 数据来源
本次试验对小米8手机观测数据进行分析。采用两部小米8手机进行同步数据观测,手机操作系统分别为Android 8和Android 9。数据采样率为1 s,观测截止高度角为10°。小米8手机支持GPS和Galileo系统双频数据,BDS和GLONASS系统单频数据。考虑到数据连续性,本文仅分析四系统单频数据。观测时间为2019年DOY 163,每次观测开始时间为UTC时间12:00,观测持续时间为3500 s。采用中海达接收机与手机组成短基线数据,手机和接收机相对位置如图4所示,手机具体信息见表1。

图4 接收机和手机相对位置Fig.4 Relative position of receiver and smartphone

表1 手机信息
4.2 双差观测值分解结果
在各观测系统分别选择高度角最大的卫星作为参考卫星,将其他观测卫星与参考卫星进行双差。采用VMD对双差观测值进行分解, 分解结果如图5所示。图5(a)表示接收机和手机间的双差伪距结果,图5(b)表示对双差伪距进行VMD分解后的低频成分,图5(c)表示双差伪距减去低频成分以后的计算残差。为了便于分析,本文分别在各系统选择观测时间最长的卫星用于展示。

图5 伪距双差观测值分解结果Fig.5 Decomposition results of pseudorange DD observation
需要说明的是,试验过程中将双差伪距观测值分别分解为两个和3个模态,分解结果表明,当分解为两个模态时,第一模态为明显的低频成分,第二模态表现为噪声;当分解为3个模态时,第二模态和第三模态均表现为噪声,说明结果有过分解的情况。综上所述,本文将伪距双差观测值分解为两个模态,且仅有第一模态为有效的低频部分。
分析上述伪距双差观测值分解结果。可以看出,四系统分解结果的主要成分虽然总体上表现出平稳性,但是存在低频变化,根据上面对于双差观测值的分析,该部分波动理论上应该是双差多路径误差导致。从分解后的双差残差可以看出,BDS系统双差观测值噪声最小,GPS系统与Galileo系统双差噪声相似,GLONASS系统双差噪声最大。
对分解结果的主要成分进行傅里叶变换,各卫星中心频率结果见表2。从计算结果可以看出,分解结果的低频成分频率均小于0.025 Hz。此外,同一个系统卫星的变化频率比较统一,BDS系统和Galileo系统数据频率小于GPS系统和GLONASS系统观测数据,结果均小于0.01 Hz。该计算结果说明对于手机多路径效应,其误差变化与卫星系统相关。
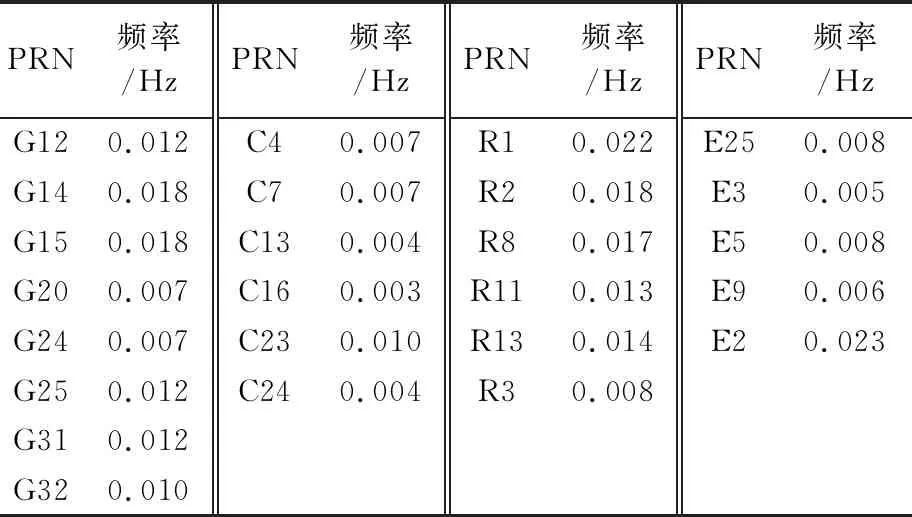
表2 各卫星伪距主成分频率
图6为载波双差观测值分解结果。由图6可知,载波双差观测值在时域中不稳定,忽略周跳的影响,双差载波观测值在连续时间上总体上表现出线性变化的趋势。该情况可能是由于手机观测值中的占空比设置导致[22]。对于GPS系统数据和GLONASS数据,双差载波数据随时间变化趋势比较稳定,而对于BDS数据和Galileo数据,载波双差观测值在连续时间内表现为不规则变化,说明双差载波观测值中除了占空比影响外,还存在其他未建模误差。对4个系统载波双差观测值分解结果进行傅里叶变换,各卫星分解后第一个成分的频率见表3。由表3可知,各系统分解结果均明显表现出低频变化,这是因为由于占空比的影响,双差观测值总体上就呈现低频变化趋势。系统内各卫星频率一致,说明手机观测打开占空比选项后,系统内卫星会受到同步影响。

图6 载波相位双差观测值分解结果Fig.6 Decomposition result of carrier DD observation

表3 各卫星载波主成分频率
4.3 各系统观测值精度分析
对各双差观测值分解后,利用上文所述方法将双差观测值低频成分回代,反算单差观测值后计算各卫星伪距观测值和载波观测值精度。为研究手机观测值精度与卫星信噪比或卫星高度角之间的关系,本文采用文献[27]中的方法对卫星观测值精度进行统计。统计自变量分别为载噪比和高度角,统计区间设为0.5。
图7是以载噪比作为自变量对小米8手机GNSS观测值精度的统计结果,图7(a)表示MIA8站观测值精度统计结果,图7(b)表示MIA9站观测值精度统计结果。由于MIA8站Galileo卫星观测值完整性较差,且观测值数据太少,因此实际计算时舍去了该站Galileo系统卫星观测值。

图7 手机GNSS观测值精度(载噪比噪比)Fig.7 GNSS observation accuracy of smartphone (carrier-to-noise ratio)
分析伪距观测值精度,从总体上看,两种手机操作系统下各卫星的伪距观测值总体上呈现指数型变化规律。对于同一操作系统,可以发现GPS、BDS和Galileo三系统观测值精度相似,GLONASS系统观测值精度明显较差,其观测值精度仅相当于其他三系统的1/2。比较两种操作系统下的观测精度,可以发现各系统观测值精度相差较小。分析载波观测值精度,4个卫星系统观测值精度相差很小。载波观测值精度为毫米级,结合文献[22]对手机本身精度的分析,可以发现该计算结果优于双差观测值三阶差分获得的精度结果,但是该结果与Android API的噪声计算结果拟合程度较高。
根据上述分析结果可知,从载噪比角度进行统计,各系统卫星伪距和载波观测值精度均呈指数变化趋势。对于伪距观测值,GPS、BDS和Galileo三系统观测值精度相似,GLONASS系统观测值精度明显弱于其他卫星系统。对于载波观测值,四系统观测值精度没有显著差异。此外,两种手机操作系统观测值精度相当,说明手机GNSS观测值精度与手机自身操作系统无关。
图8为以高度角为自变量的手机GNSS观测值精度统计结果。对于伪距观测值,手机观测精度在以高度角为自变量时表现出较弱的相关性。对于载波观测值,各系统观测精度在高度角域变化不明显。总体上,可以认为手机GNSS观测精度与卫星高度角相关性较差,因此,定位计算时不适合采用高度角随机模型进行定权。

图8 手机GNSS观测值精度(高度角)Fig.8 GNSS observation accuracy of smartphone (elevation)
4.4 定位结果分析
分别对MIA8和MIA9两站进行伪距单点定位、精密单点定位。定位时采用载噪比随机模型。结合上文分析获得的手机各系统观测值精度进行载噪比随机模型拟合,拟合结果与模型形式见图9。需要说明的是,结合上文分析,进行随机模型拟合时仅采用GPS、BDS和Galileo系统观测值进行拟合。实际计算时,GPS、BDS、GLONASS和Galileo四系统伪距观测值权重设为1∶1∶4∶1,载波观测值四系统等权。定位计算时电离层采用Klobuchar 8参数模型进行计算,对流层误差利用Hopfild模型估计(PPP定位时估计天顶对流层误差)。

图9 载噪比随机模型拟合结果Fig.9 Fitting result of carrier-to-noise ratio stochastic model
图10表示MIA8站和MIA9站的伪距单点定位结果。红色为采用高度角随机模型的计算结果,黄色表示采用载噪比随机模型后的定位结果。椭圆和直线表示95%置信区间对应的范围。从图10中定位结果可以直观地看出,采用载噪比随机模型后,95%置信区间对应的区间明显缩小。统计两个手机定位结果的中误差。MIA8站的N、E、U 3方向定位中误差分别由0.861、1.004、2.467 m减为0.574、0.735、1.832 m,提升幅度分别为33.36%、26.75%、25.71%。MIA9站的N、E、U 3方向定位中误差分别由1.011、1.578、3.167 m减为0.709、1.024、1.793 m,提升幅度分别为29.92%、35.11%、43.36%。
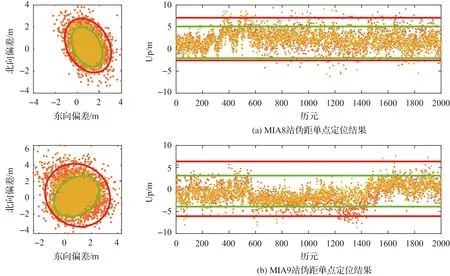
图10 伪距单点定位结果Fig.10 Results of pseudorange single point positioning
为判断信噪比模型的实际应用效果,利用不同时间的观测数据进行伪距单点定位试验。对比数据的观测日期分别为2019年DOY 170、DOY 267、DOY 322,采样率均为1 s。3天定位结果提升幅度见表4。从结果中可以看出,当时间相差较短时(2019年DOY 267),采用本文所述方法后伪距单点定位结果仍有明显提升,MIA9站手机各方向提升幅度均在25%以上。当时间跨度较长时,本文所述的计算结果提升幅度相对不明显,甚至会有精度降低的情况。该结果说明,手机定位时所采用的随机模型不能固定,应当根据时间和外界温度信息进行综合考虑。此外,2019年DOY 322,MIA9站手机的定位结果提升幅度十分明显,这里可能是因为用于对比的高度角随机模型不适用于该组数据。

表4 不同数据定位结果与提升效果
图11表示采用载噪比随机模型后的精密定位结果。由图11中可以看出,采用拟合的载噪比随机模型后两测站平面结果都能收敛。其中MIA8站N、E方向收敛至-0.47、0.50 m,MIA9站N、E方向收敛至-0.35、0.59 m。MIA8站U方向最终收敛至-1.03 m,MIA9站U方向呈现一定的游走趋势,这里不进行统计。PPP定位结果表明,采用拟合的载噪比随机模型能够实现手机精密单点定位收敛,且平面定位精度在1 m以内。
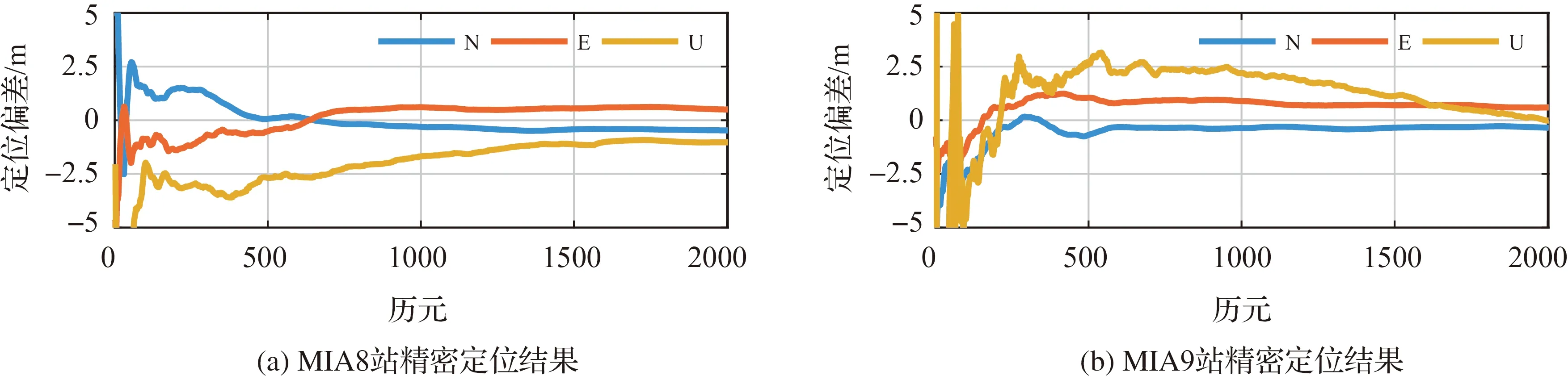
图11 精密单点定位结果Fig.11 Results of precise point positioning
5 结 论
目前主要采用三阶差分或者历元间差分的方式提取GNSS数据噪声,这些方法计算的结果受到卫星相关性和数据时间相关性的影响。本文提出采用VMD提取手机GNSS观测噪声的方法:首先,计算手机与接收机数据的双差观测值,利用VMD提取双差观测值主成分;然后,利用提取的成分对各卫星站间单差观测值进行反算,以消除卫星间的相关性;最后,计算手机GNSS的各卫星观测噪声。
为检验VMD分解效果,分别利用不含噪声、含有噪声和含有间断信号的3种模拟信号对其进行了检验。检验结果表明,VMD在各情况下均有良好的分解效果,说明利用VMD对混合信号进行分解具有可行性。利用VMD对手机与接收机的双差观测值进行分解。伪距双差观测值的分解结果表明双差观测值中存在明显的低频成分,且各成分与系统相关。对载波双差观测值的分解结果表明,其低频成分呈现不规则变化,说明手机载波观测值不仅仅受到占空比影响,可能还存在其他的未建模误差。
利用VMD分解的方法计算小米8手机的GNSS观测值噪声并进行分析。对于伪距观测噪声,GPS、BDS和Galileo三系统的结果一致,GLONASS系统伪距观测噪声约为其他系统的两倍。对于载波观测噪声,4个卫星系统的计算结果比较一致。此外,分析结果表明手机操作系统对手机GNSS观测值质量不影响。
分别采用载噪比和高度角为自变量统计手机GNSS观测精度,结果表明手机GNSS观测值质量与载噪比相关性较强。因此,手机GNSS定位计算时更适合采用载噪比随机模型。利用各系统观测精度进行随机模型拟合,并利用拟合的随机模型进行定位试验。伪距单点定位结果表明,相对于高度角模型,采用载噪比随机模型后定位精度明显提高。其中MIA8站3方向的定位内符合精度分别由0.861、1.004、2.467 m减为0.574、0.735、1.832 m,提升幅度分别为33.36%、26.75%、25.71%。MIA9站定位内符合精度分别由1.011、1.578、3.167 m减为0.709、1.024、1.793 m,提升幅度分别为29.92%、35.11%、43.36%。PPP定位精度表明,采用载噪比随机模型后,两测站平面定位精度均能收敛至0.6 m以内。
对不同时间观测数据的定位试验表明,手机GNSS随机模型不能恒定,考虑到手机芯片受温度的影响比较明显,因此在后面的研究过程中,可能需要对不同季节手机GNSS观测值质量进行深入分析。此外,由于数据连续性影响,本文仅分析了四系统单频数据,未来也会对手机GNSS双频数据进行分析。