电子罗盘消除固定位置变磁场干扰方法
2021-04-27周阳
周阳

摘 要:文章针对位置固定的变磁场干扰源,提出了基于特定位置等比例关系的双磁传感器校准补偿法,对电子罗盘方位角进行二次校准,将变磁场干扰源对电子罗盘的干扰由15°减小到0.7°以内。该方法具有采集运算简单、成本低廉、使用方便、容错率高等诸多优点,为变磁场干扰源的校准补偿提供了新的思路。
关键词:电子罗盘;变磁场干扰;二次校准
中图分类号:TN97 文献标识码:A 文章编号:1001-5922(2021)08-0158-04
The method of Electronic Compass to Eliminate the Interference of Fixed Position and Variable Magnetic Field
Zhou Yang
(Beijing Keeven Aviation Instrument Co., Ltd., Beijing, 101300, China)
Abstract:Aiming at the variable magnetic field interference source at a fixed location, this paper proposes a dual magnetic sensor calibration and compensation method based on the proportional relationship of a specific location. The azimuth angle of the electronic compass is calibrated twice, and the interference of the variable magnetic field interference source on the electronic compass is reduced by 15° decrease to within 0.7°. This method has many advantages such as simple acquisition operation, low cost, convenient use, high error tolerance, etc. It provides a new idea for the calibration and compensation of variable magnetic field interference sources.
Key words:electronic compass; variable magnetic field interference; secondary calibration
高精度电子罗盘能够通过校准大幅降低周边固有磁场的干扰,准确指示方位角,但卻对变化的磁场干扰束手无策。在电子罗盘的使用过程中,都会尽量避免铁、磁物质的靠近。但有些电子罗盘搭载平台存在来源于平台内部的变磁场干扰,随着电子罗盘一同运动。这类干扰源具有相对位置固定、磁场变化的特点。此时,常用的技术途径有以下3种:①让变磁场暂时停止变化或使用磁屏蔽材料隔绝干扰;②另辟蹊径使用双GPS、ARHS等系统指示方位角,绕开变磁场的干扰;③测出变磁场干扰源对周围磁场的影响,再根据磁场的变化量逆推,对电子罗盘方位角进行补偿。在某些使用场景下,既无法屏蔽变磁场干扰,同时由于搭载平台限制,也无法使用价格昂贵、重量大、空间需求大的双GPS、ARHS系统。此时第3种技术途径就成了唯一可行的解决方案。
1 变磁场干扰测试及补偿方法
1.1 变磁场干扰重要规律
模拟实际使用场景搭建测试环境,磁钢和电子罗盘固定在测试工装相应位置,选用某型磁阻传感器和拥有大量程的霍尔传感器分别进行测试。将磁传感器置于工装上不同位置,在工装不同朝向时,分别记录无磁钢时和不同磁钢姿态下电子罗盘和磁传感器的读数,进行整理比较。假设G磁钢是磁钢姿态变化引起磁传感器某轴读数的变化量,即有磁钢时的磁传感器读数减去无磁钢时读数,表征着磁钢对磁传感器所在位置磁场的影响。通过大量实验和归纳总结,发现在一定区域范围内,当磁传感器沿磁钢形成的虚拟磁力线布置时,有如下重要规律:
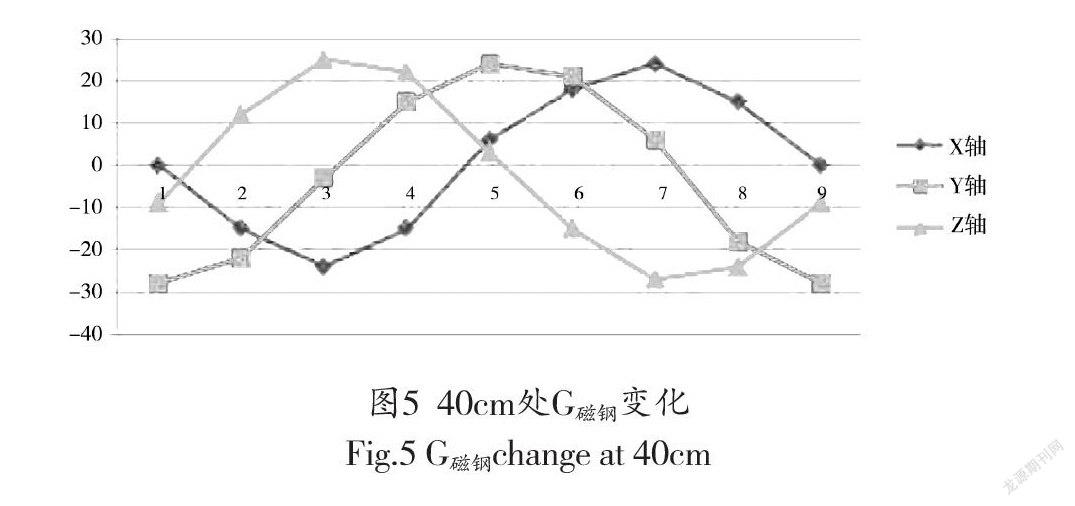
(1)G磁钢随着距离的增大迅速减小。例如距离磁钢1cm处G磁钢约为±200000,10cm处为±1500,20cm处±200,30cm处±65,40cm处±30。而测试地点地磁的读数略小于±300。
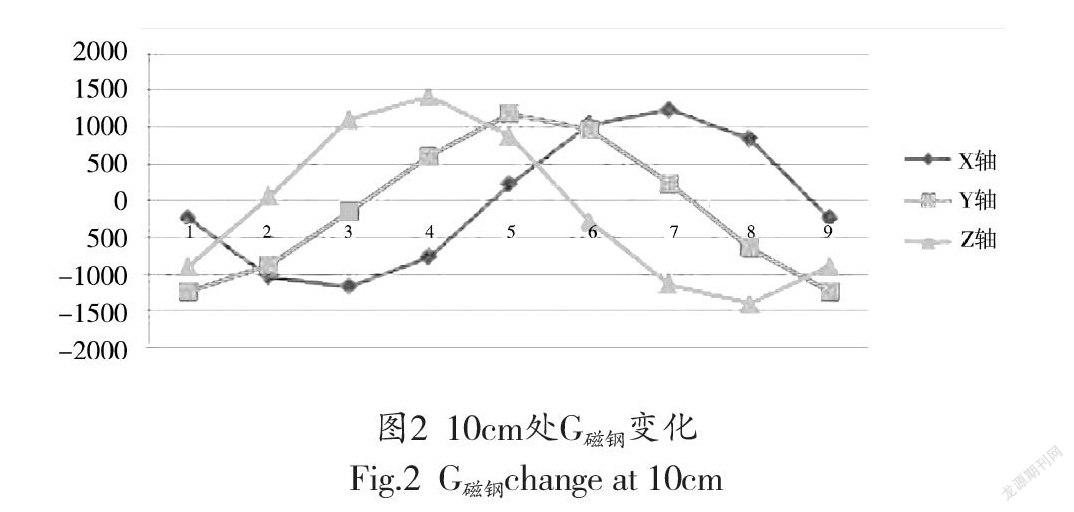
(2)在测试工装朝向不同方位时,G磁钢为定值。如图1为距离磁钢10cm处G磁钢变化规律,横轴为磁钢N级朝向,分为8个方向。可以看到东南西北4个方向的曲线基本重合。而磁传感器其他两轴也完全符合这一规律。
(3)磁钢处于同一姿态时,对沿着磁钢形成的虚拟磁感线方向的磁场影响值方向相同,值成正比关系,即:
G磁钢A =K×G磁钢B
其中G磁钢A和G磁钢B为磁钢形成的虚拟磁感线上两个不同位置,由磁钢姿态变化引起的磁场变化矢量。图2~5为工装朝北时,磁钢转动引起10cm、20cm、30cm、40cm处G磁钢变化曲线。横轴为磁钢不同姿态,3条曲线分别代表x、y、z三轴。初步测试时磁传感器手动摆放,位置误差偏大。后续实验中,随着磁传感器位置、航姿精度的提高,曲线一致性更加明显,规律被一再验证。
1.2 双磁传感器补偿
根据以上3条规律,在先不考虑平台其他部位干扰的条件下,提出一种基于双磁传感器的测试、补偿方法,可有效测得磁钢姿态变化对电子罗盘位置处磁场的影响分量G磁钢。将一个编号为B的磁传感器放置在电子罗盘的磁通门附近(也可使用电子罗盘三轴磁传感器读数,即将电子罗盘当做B磁传感器),另一个编号为A的磁传感器放置在符合上述关系且便于在平台上安置的位置,保持A、B磁传感器和电子罗盘3轴同向。设实验中磁传感器某轴的输出为:
G = G地+G磁钢+ G干扰
G地和G干扰分别为该轴的地磁分量和环境干扰分量。由于2个磁传感器距离较近,在远离外界强磁干扰的情况下可得:
G干扰A≈G干扰B,G地A=G地B
所以:GA-GB=G磁钢A-G磁钢B
又有:G磁钢A=K×G磁钢B(K-1)×G磁钢B=GA-GB
设k=K-1,最终得到:
G磁钢B=(GA-GB)/k
其中,GA、GB为A、B磁传感器上同一个轴的读数。而由于A、B磁传感器位置固定不变时,其变化量的比值k为定值可以求得。于是可根据上式轻松求得在磁传感器B处——即电子罗盘处磁钢姿态变化引起的影响分量。
上述实验发现和推理提供了一种全新的思路,使用2个小巧、廉价的磁传感器以异常简单的方法推算磁钢姿态变化引起的电子罗盘附近的磁场变化量。而后只需研究这个变化量和电子罗盘方位角偏移量之间的关系,无需根据磁钢附近的磁场变化来计算磁钢姿态,也不需要研究平台在不同方位角、俯仰角、横滚角时磁钢姿态与电子罗盘方位角偏移量之间复杂的映射关系,极大的简化了计算过程,大幅减少了数据采集工作量。
为了进一步验证方案的可行性,在工装朝向不同方位、磁钢不同姿态、磁钢N级不同位置情况下采集数据并验证,均符合上述关系。
于是下一步工作就是找寻磁钢在电子罗盘位置的影响量和电子罗盘方位角偏移量之间的关系。已经求得电子罗盘处G磁钢B,并且可以通过对磁传感器进行校准,使G干扰≈0,因此可得:
G地≈GB-G磁钢B
理论上,已知电子罗盘处地磁值、磁钢干扰影响量和电子罗盘的姿态,可求出由磁钢干扰引起的电子罗盘方位角偏移量。甚至可直接用地磁值求出方位角,补偿精度不高。通过大量的理论论证和实验验证,得到3种基础补偿方法:①通过实验数据直接计算出补偿参数予以补偿;②加入干扰后的方位角减去无干扰情况方位角;③计算加入干扰后磁北方向的偏移量。以上3种方法还可以嵌套、迭代、融合,衍生出十几种补偿算法。比较各种衍生算法在不同情况下的补偿精度,得到2种表现较好的算法。电子罗盘在工装上受磁钢影响后的方位角偏移量由最大±15°減小到±0.3°以内,效果十分显著。而后进一步优化算法,因地域变化地磁大小发生明显改变时,不需要重新采集计算补偿参数。
2 磁传感器校准
实验过程中,采用转台校准法对磁传感器自身进行校准,消除其标度因数和零点漂移引起的误差。磁传感器安放在平台上以后,转台校准法无法满足要求,使用一种空间采集多点校准法,在平台上通过多点采集数据完成电子罗盘和磁传感器的校准,消除平台对电子罗盘和磁传感器的干扰。
将磁钢暂时固定不动,其干扰可以看作是平台干扰的一部分。磁传感器经过自校准后,随平台一起在空间中旋转,采集6面4角共18个点的磁传感器数据和姿态数据。其中姿态数据来源于同向的三轴加速度计。而后,对数据进行处理。假设某磁传感器三轴的读数分别为X、Y、Z,三轴排除干扰后的真实值为Xr、Yr、Zr,则有:
其中aj和bj分别为j轴标度因数和零点漂移,ekj和eij分别为j轴上与另外k、i两轴相关的软铁校准因数。
假设磁传感器位置有一个方向固定的虚拟轴,则排除干扰后的磁场在该轴上的投影应为定值,设为δ,则有:
其中,α、β、γ分别为磁传感器X、Y、Z三轴向空间虚拟轴投影的转换因数,可以通过磁传感器姿态求得。将式(4)代入式(5),设B磁传感器Y轴标度因数为aBy=1,则可得到一个共有24个未知因数的方程。根据式(5),两磁传感器18次采集可得到36个等式,两两相减消去δ,即可得到一个由35个方程构成的23元一次超定方程组,解多元一次超定方程组可得最佳解。将最佳解和两个磁传感器在18个姿态采集的数据带人式(5),可得到各种姿态下的δ,δ计算的标准差可以据此评判磁传感器校准效果,其值越小越好。
磁传感器的水平投影图是将磁传感器的三轴数据投影到水平面上形成的,可以直观的反映磁传感器受磁场干扰的情况。理想无干扰状态下,该图是以零点为圆心的圆。某个磁传感器校准前后的平面磁场投影如图6所示,可以看到原先偏离圆心的椭圆得到了有效修正。
3 平台测试
在磁传感器有效校准的基础上,用融合后的补偿算法在平台上进行测试,记录补偿后的方位角,并和电子罗盘单独指示时的方位角进行比较。图7为平台处于某补偿误差较大的姿态时的误差曲线图,可以看到其误差≤0.6°。将磁钢置于任意姿态,在电子罗盘任意指向情况下随机测试,大量测试中得到的最大补偿误差≤0.7°,远远优于无补偿的误差。
如果使用电子罗盘代替B磁传感器,在A磁传感器未通过校准消除平台干扰的情况下进行测试,方位角误差约为1.5°。这是因为其他磁场对A磁传感器干扰除以比值k以后被大幅减小。这表明该补偿方法具有较高的容错率,在精度要求不高的情况下可不进行磁传感器的平台校准。
4 结语
文章针对位置固定的变磁场干扰源,提出了基于特定位置等比例关系的双磁传感器校准补偿法,在使用转台校准法和空间采集多点校准法有效校准磁传感器的前提下,将磁钢对电子罗盘的干扰由15°减小到0.7°以内。该方法具有采集运算简单、成本低廉、使用方便、容错率高等诸多优点,为变磁场干扰源的校准补偿提供了新的思路。
参考文献
[1]王勇军,李智,李翔.三轴电子罗盘的设计与误差校正[J].传感器与微系统,2010,29(10):110-112.
[2] TCM XB 电子罗盘用户手册
[3] 电子罗盘的工作原理及校准
[4] 张娇,陈静,杨栓虎.三轴磁阻式传感器标定方法研究[J].弹箭与制导学报,2010,30(06):46-48.
[5] 杜英,李杰,孔祥雷,等.无航向基准条件下电子罗盘的误差补偿方法研究[J].传感技术学报,2010,23(09):1285-1288.
[6] 张爱军,王昌明,赵辉.三轴电子罗盘的磁航向角误差补偿研究[J].传感器与微系统,2008(08):33-35.
[7]支祖伟,高可,储志伟,等.基于非迭代椭球拟合算法的电子罗盘标定方法[J].仪表技术,2020(09):3-6.
[8]刘耀波.基于PNI磁传感器的低功耗电子罗盘研究[J].电子测量技术,2020,43(12):158-162.
[9]晁正正,张晓明,马喜宏,等.一种新的电子罗盘校准算法研究[J].传感技术学报,2019,32(01):106-110.
[10]龙礼,黄家才.基于递推最小二乘法的地磁测量误差校正方法[J].仪器仪表学报,2017,38(06):1440-1446.
