下肢辅助外骨骼机器人研究
2021-04-24崔润扬辛光红
崔润扬 杨 熹 辛光红 曹 文
(三亚学院,海南 三亚572000)
1 概述
近年来,关于仿人型机器人的科学研究已经成为机器人研究领域的热门方向,其研发水平已取得很大的进步,研制了各式各样、不同用途的仿人型机器人,并已将其运用到实际生活中。动力外骨骼机器人是一种可以穿戴的机器人,它通过模仿人体的下肢结构进行设计,它不仅能帮助因先天或者疾病造成的肌肉损伤残疾人恢复行走能力,还有可以改善心脏健康状况、锻炼肌肉强度。本项目设计的新型动力外骨骼机器人,是在研究一种单兵“XOS—外骨骼机器人”和一种医用“LOPES-悬挂式康复机器人”的基础提出的全新有机融合,弥补了两种外骨骼机器人的不足。其结构主要由外骨骼机械主体、控制系统、传感器系统、电源系统、动力系统组成。下肢辅助外骨骼机器人可以帮助患者进行步行医疗康复训练,为不能自主行走的患者或老人提供辅助运动和康复训练[1]。

图1 人体的基本面与基本轴

图2 小腿力学简化模型
2 下肢辅助外骨骼运动受力分析
外骨骼机器人的动力学是解决机器人的力与力矩与运动关系的方法。根据人体解剖学,人体可分为三个互相垂直的基本面,如图1 所示,额状面、水平面以及矢状面对应有三个互相垂直的基本轴:矢状轴、垂直轴与额状轴。人体的各种运动都可以视为肢体绕三个基本轴的运动。而因为动力外骨骼主要针对腰部及下肢进行动力学分析[2],如图1。
下肢受力分析主要包括小腿受力分析、大腿受力分析与运动步态受力分析。进行力学分析时,将下肢外骨骼模型进行了简化。小腿受力模型简化为图2,其中小腿、小腿连杆的质量分别为m1, m2, m3。首先求解出整体质心所在的位置,由于脚部的质量相对于整体质量较小,对分析影响不大,可在分析过程中忽略质心处于杆件之外的部分。经推导其惯量和角度之间的关系为:


大腿受力模型简化为图3,大腿外部构建的重量为m2,大腿的质量为m1,大腿重心距离髋关节的距离为l2c,大腿的重心距离髋关节距离为l1c。

图3 大腿受力简化模型

图4 D-H 坐标模型
经推导可得:

D-H 法是利用基本齐次变换矩阵表示两个相邻杆件位置关系的一种常用的运动学分析方法,用矩阵表示机器人运动参数从而推导出机器人的运动方程。外骨骼摆动腿D-H 坐标系示意图4。T1、T2和T3分别是外骨骼机械腿髋关节、膝关节和踝关节的转矩;m1, m2和m3分别是大腿连杆、小腿连杆和踝关节以下连杆的质量;d1、d2、和d3分别表示各连杆质心距离对应关节的距离。由于踝关节以下连杆和足底不转动,就相当于固定在小腿末端的质量块。这样处理之后,外骨骼机械腿就相当于一个两连杆机构,其系统动能与运动所需力矩表达如下:
对大腿连杆:

对小腿连杆:

K1K2、P1P2分别表示系统动能、势能,T1:髋关节屈伸运动所需力矩,T2:膝关节屈伸运动所需力矩[2]。
3 机械结构设计
根据上述力学分析,外骨骼机器人的机械结构可以看作是由一系列连杆通过旋转关节(或移动关节)连接起来的开式运动链,一般机械设计主要是强度设计,外骨骼机械设计既要满足强度要求,还要考虑刚度和精度设计,与一般机械相比,机器人的机械设计在结构的紧凑性、灵巧性等方面有更高的要求[3]。本项目的机械设计结构如图5 所示:
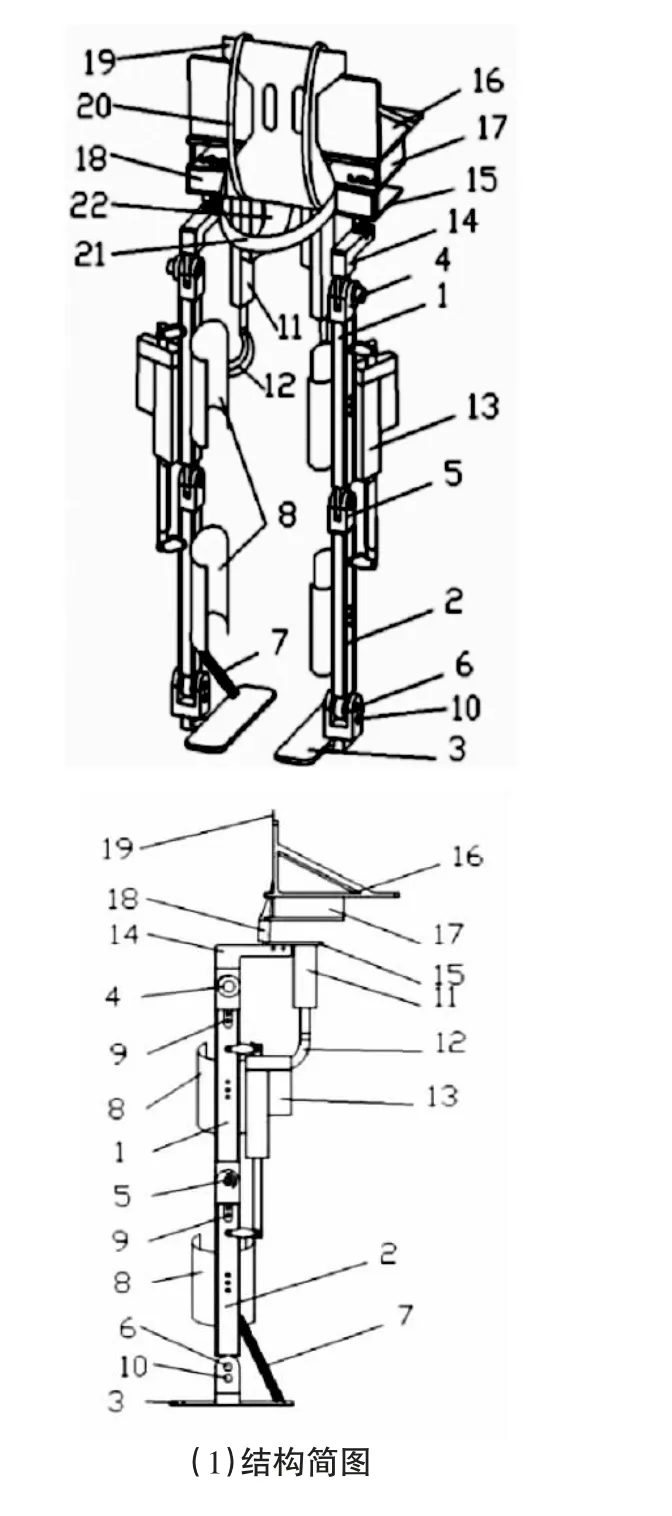

图5
4 驱动与控制设计
本外骨骼机器人的驱动系统采用的是直流推杆电机,考虑到髋关节与膝关节运动时角速度与负载的不同,髋关节驱动的电机推力为:500N 速度为:40MM/S 行程:100MM;膝关节驱动的电机推力为:200N 速度为:80MM/S 行程:100MM。质量推杆电机驱动模块模块支持电压范围7-24V,具有欠压保护功能。双路电机接口,每路额定输出电流7A;瞬间峰值电流可达50A。每路都支持三线控制调速、正反转及刹车。控制信号使用灌电流驱动方式,支持绝大多数单片机直接驱动并使用光耦对全部控制信号进行隔离,避免电机动作时的回流电流对控制信号造成干扰。模块具有静电泄放回路,避免了因静电造成危险。本项目控制器选用Arduino 开源平台,Arduino 可以接收来自各种传感器的输入信号从而检测出运行环境,并通过控制光源,电机以及其他驱动器来影响其周围环境。项目驱动和控制结构图如6 所示。控制逻辑如表1。其中0 为低电平、1 为高平、×为任意电平,悬空时为低电平。

表1 推杆控制逻辑
控制反馈采三轴加速度传感器MMA7361 芯片,在姿态控制之外还可用于外骨骼跌倒检测、倾斜度测量等场合,在本机械外骨骼机器人设计中起到检测平衡的作用。
5 应用模式
本设计可进行三种模式转换,通过手动控制端进行行走模式、蹲起模式和攀爬模式三者之间的不同模式切换。

图6 驱动控制结构图
行走模式是可以帮助穿戴者步行助力,可以达到腿部神经肌肉的训练,机器人可以通过传感器系统进行人体步态的控制。蹲起模式可以帮助实现人体本身的一个下肢运动,控制人的下肢做蹲下起立的动作,当模式切换到蹲起模式的时候,电机会驱动人体下肢进行蹲起,使人体的腿部神经进行运动。当模式切换到攀爬模式时,机器人可推动腿部进行向上抬起,穿戴者可以正常上下楼梯,对于一些登山运动员也可以达到助力的效果。目前设定了以上三种模式,后期根据不同需要的病人,可以根据所需设定的康复训练系统。使下肢辅助外骨骼机器人最大程度上达到服务于人的目的[4]。
6 创新与总结
下肢辅助外骨骼机器人的机械外形设计,采用了韧度好、重量轻的铬合金,相较于美国的“XOS—外骨骼机器人”有更灵活轻便的机械本体,电动推杆带动机械杆件运动,不会有以液动气动为动力源的外骨骼机器人所产生巨大噪音。相较于“LOPES-悬挂式康复机器系统”,下肢辅助外骨骼机器人采用500N 和200N 推力的电动推杆作用在机械杆件上,在不用复杂且笨重的气动、液动动力装置的同时,提供主动力辅助穿戴者独立行走,还可依靠外骨骼机器人负重行走。推杆式的电机设计相比于行星减速机的扭矩力电机本设备成本低,实用性强,更加符合大众的消费水平,有利于该设备的推广。
