搬运辅助外骨骼结构设计与实验
2021-04-23曲希帅徐爱民屈盛官夏雨萌
曲希帅, 徐爱民, 屈盛官, 马 涛, 赵 宁, 夏雨萌
(1.华南理工大学 机械与汽车工程学院, 广东 广州 510640; 2.内蒙古第一机械集团有限公司 专用车辆和传动系统智能 制造国家重点实验室, 内蒙古 包头 014032; 3.中国兵器工业新技术推广研究所, 北京 100089)
引言
尽管目前在工业领域存在广泛地使用机器人代替劳动力进行物料搬运的现象,但许多短途物料搬运任务仍由人工完成[1],工人的主观能动性能够在部分任务中发挥不可替代的优势[2]。近年来,人们越来越关注和研究可穿戴机器人技术(包括外骨骼)来帮助工人无风险地完成搬运任务[3]。外骨骼作为穿戴式装备,结合了人工智能与机械,具有很好的人机交互性[4]。
外骨骼通常被分类为主动型和被动型。主动型通常借助驱动系统(电机/液压系统/气动系统等)以增强人的力量,降低人体自身的能量消耗。几款国外知名的主动外骨骼,在技术上已实现突破:HULC助力外骨骼作为负重外骨骼的代表,穿戴者能以3.9 km/h的速度搬运90.718474 kg的重物行走[5];XOS借助液压驱动增强穿戴者的负重能力,同时具备行动的灵活性[6];HAL系列外骨骼在辅助行走领域实现了商业化应用。但主动型外骨骼普遍尺寸较大且造价昂贵,都不适合工人使用。被动型外骨骼是借助弹性构件在运动期间储存和释放能量来帮助穿戴者进行工作,国外多款被动外骨骼已被证明能够显著降低腰背部的肌肉活动。Happyback由玻璃纤维杆组成,专门设计用于静态弯腰姿势[7];PLAD借助肩膀和膝盖部位的6个弹性元件实现在多种弯腰搬运任务中对腰部肌肉的助力[8]。国内针对外骨骼的研究起步较晚,但发展迅速:方郁[9]研发的外骨骼机器人借助直流电机驱动,具备6个方向的自由度,可协助不同身高的穿戴者实现基本运动;张佳帆[10]研发的气动柔性上肢外骨骼由人工肌肉驱动,可增强穿戴者的上肢能力。
为了能有效降低工人在工作过程中腰背部肌肉损伤的风险,开发出一款适用于国内一线工人的助力装备,本研究提出了一种轻量化、低成本的被动式搬运辅助外骨骼,借助弹性储能元件实现对搬运动作的助力效果。
1 搬运过程运动学模型及受力分析
1.1 弯腰搬运过程运动模型
外骨骼机器人关节主要包括髋关节和膝关节[11]。运动形式及运动角度如表1所示。
人体运动本质上是空间运动,解剖学定义了人体的3个基本运动平面:矢状面、冠状面、水平面,运动过程主要在矢状面进行[12]。人体运动学模型依靠躯干、肢体的空间位置关系和角度变化信息建立[13]。借助Opensim软件生成的矢状面内人体肌肉骨骼搬运模型,
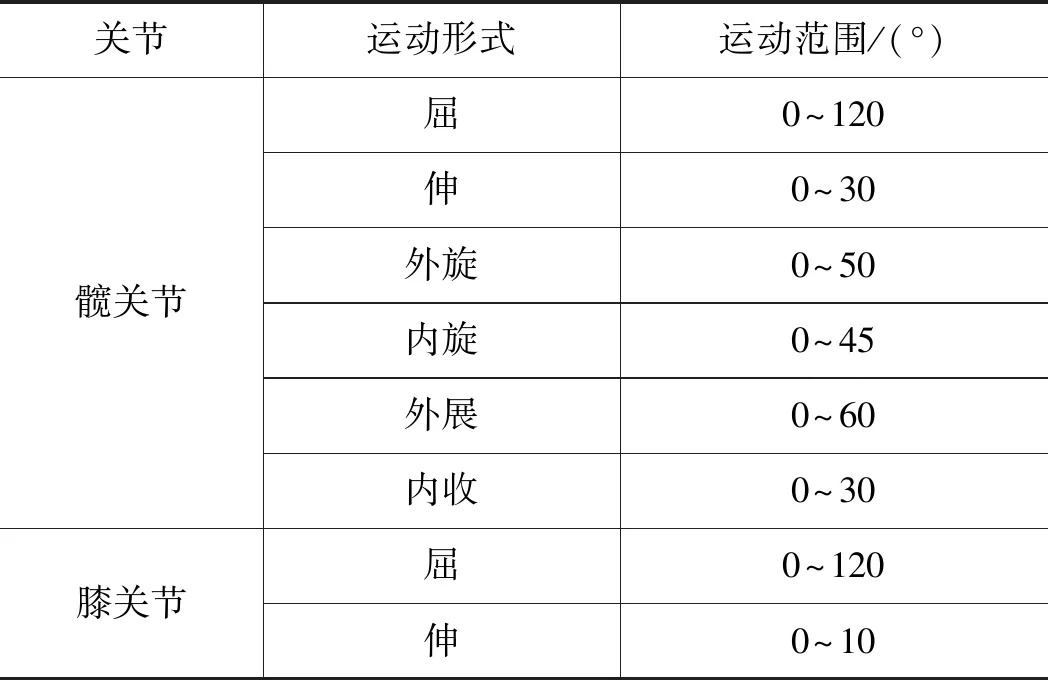
表1 髋、膝关节运动形式及角度
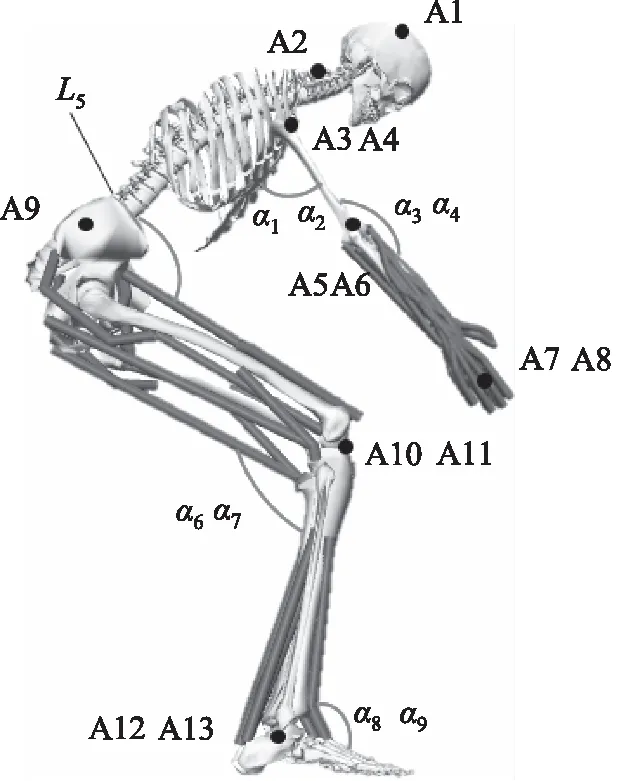
图1 矢状面人体搬运模型
如图1所示。
图1中,A1~A13分别表示人体头部、颈关节、左肩、右肩、左肘、右肘、左手掌、右手掌、髋关节、左膝、右膝、左踝、右踝。α表示各关节角度,则搬运过程站立(S1)、弯腰(S2)、蹲姿(S3)可用上述模型表示为[14]:
S1=[α6=180°]∧[α8=90°]∧
[α7=180°]∧[α9=90°]∧[α5=90°]
(1)
S2=[α6=180°]∧[α8=90°]∧[α7=180°]∧
[α9=90°]∧[0°≤α5≤90°]
(2)
S3=[0°≤α6≤60°]∧[0°≤α8≤60°]∧
[0°≤α7≤60°]∧[0°≤α9≤60°]∧
[0°≤α5≤90°]
(3)
其中,∧表示随动距离。弯腰搬运过程中,外骨骼与腰部关节尺寸的偏差会影响整体的舒适度[15]。以图1所示的腰椎L5节点作为直角坐标系原点,整个腰椎关节的运动半径可通过最小二乘法计算[16]:
(4)
分别针对参数A,B,C求偏导:
(5)
(6)
(7)
已知成年人髋关节的弯曲半径尺寸范围[17],可以求解出旋转中心的坐标值(x0,y0)和旋转半径r,降低外骨骼设计的尺寸偏差。
1.2 弯腰搬运过程受力分析
为了实现外骨骼在搬运过程对人体的助力效果,对弯腰搬运动作进行受力分析,如图2所示。
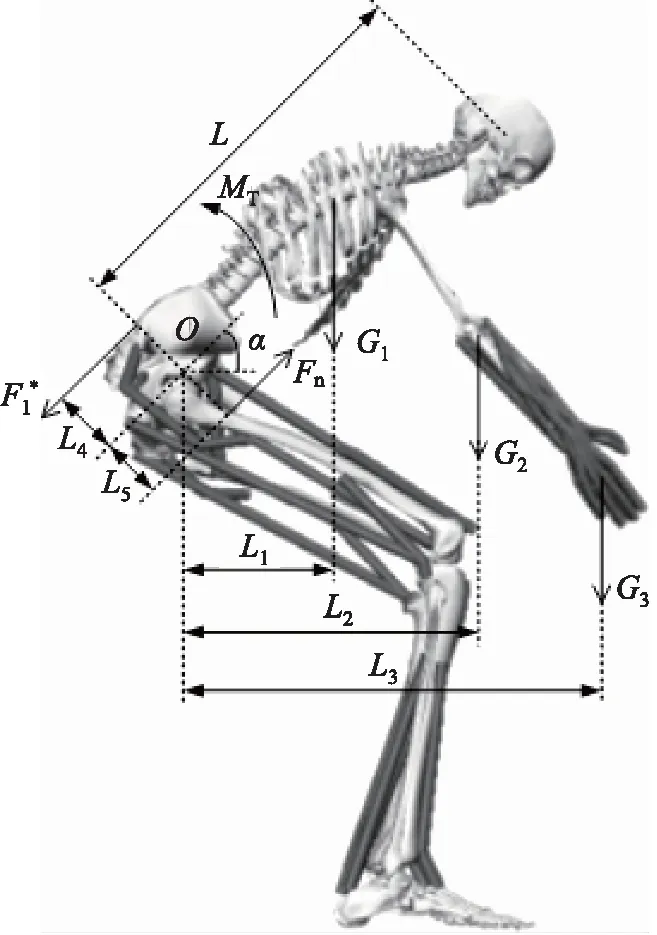
图2 弯腰搬运过程受力分析
上身所有受力在点O处所产生的的合力矩为0,即:
Fn·L5+F1·L4-G1·L1-G2·L2-G3·L3=0
(8)
其中,F1为腰部竖脊肌所受的拉力,Fn为腹部和髋关节的支撑力,G1为人体躯干和头部的重量,G2为人体手臂和手掌的重量,G3为重物的重量。
由式(8)可求出腰部肌肉所受的拉力:
由式(9)可知,F1主要受自身体重和搬运重量的影响。当搬运重量G3超出一定范围时,腰部肌肉会有损伤的风险。穿戴外骨骼后点O处的受力分析为:
G3·L3+MT=0
(10)

(11)
记助力比为K:
(12)
设体重为M,相关研究表明,M1=0.044M,M2=0.386M,M3=0.25M,支撑力Fn=0.12Mg[18],L1~L5由图2中的L和α表示,结合式(11)、式(12)可得:
(13)
研究表明,过大的助力比会导致人体肌肉肥大,造成副作用,而绝大多数外骨骼助力比都处于35%~50%之间[19]。本款搬运辅助外骨骼助力比K设置为40%,M取60 kg,L取0.6 m,α取25°,代入式(13)可得:
MT=60 N·m
(14)
2 搬运辅助外骨骼结构设计
2.1 总体设计
搬运辅助外骨骼作为工业装备,为了能适应不同的工业环境并有效地在搬运过程提供助力,需要满足以下要求:
(1) 方便调节:不同穿戴者的尺寸存在很大的差异,外骨骼必须具有较广的适用性,用于固定的部件应该可在一定范围内调节;
(2) 保证安全性和舒适度:作为穿戴式装备,确保人机交互可靠、安全地进行,运动自由度做到合理的分配;
(3) 轻量化,易穿戴:在实现助力效果的同时,要尽可能轻量化,降低对人体的负载和惯性冲击[20]。
搬运辅助外骨骼的总体机械设计使用SolidWorks

1.肩背固定板 2.背部支撑杆 3.髋部固定板 4.连接夹板 5.弹性蓄能模块 6.腿部支撑图3 外骨骼总体结构
软件作为三维作图软件,机械总体设计如图3所示。
2.2 弹性蓄能模块结构设计
搬运辅助外骨骼对弯腰搬运过程的助力主要依靠弹性蓄能模块实现,弹性蓄能模块结构剖视图如图4所示。
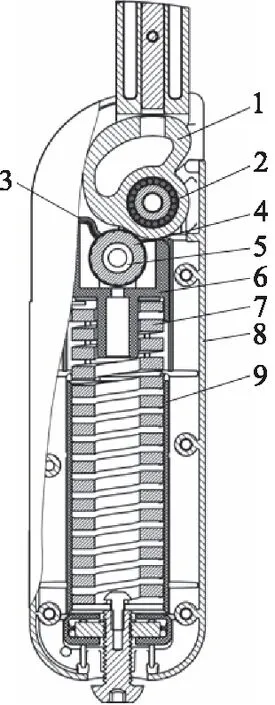
1.凸轮 2.第一滚针轴承 3.限位件 4.第二滚针轴承 5.小轴 6.滑动套 7.弹簧 8.壳体 9.套筒图4 弹性蓄能模块剖视图
在穿戴者弯腰时,凸轮在背部连接杆的带动下转动,从而推动滑动套向下移动,压缩弹簧使其蓄能,将弯腰过程的上身重力势能转化为弹簧的弹性势能;当穿戴者恢复直立时,弹簧对背部连接杆给予支撑,从而为穿戴者提供辅助力矩MT,达到搬运助力效果。
2.3 凸轮与弹簧参数设计
由式(14)得MT最大值取60 N·m,根据图4弹性蓄能模块助力原理可知:
MT=k×ΔL×e
(15)
其中k为弹簧的刚度,e为凸轮机构的偏心距,ΔL为凸轮的最长行程。为了精简部件尺寸,取偏心距e=21 mm,ΔL=18 mm。
由式(14)、式(15)可得k=80 N/mm。考虑实际要求,采用Ⅰ类60Si2Mn弹簧。弹簧最大压缩变形量和弹簧刚度计算公式如下所示:
(16)
(17)
(18)
由式(16)~式(18)确定弹簧的计算边长a、边长b、中径D和弹簧有效圈数n,其中τ为切应力;τp为许用切应力;β,γ为弹簧系数;Pn为最大工作载荷;G为切变模量。
2.4 关键零部件力学仿真
弯腰过程中,图3中连接夹板4连接卡扣,将弯腰过程的转矩传递给图4中凸轮1,带动凸轮1旋转压缩弹簧7。为确保外骨骼结构设计的合理性和安全性,对连接夹板4进行有限元分析。
由式(14)可知单边零件上的转矩大小为30 N·m。对结构进行约束和施加载荷,进行网格划分之后得到如图5所示的分析结果。由图5a可知,最大位移为0.03767 mm,发生在零部件边缘处,通过应力分析结果可知,最大应力242.2 MPa,如图5b所示。选用材料7075-T6的许用应力为505 MPa。在承受上述外载下,结构能正常运行,不会发生损坏。

图5 连接夹板变形和应力分析图
3 模拟搬运实验
为了验证外骨骼样机对人体弯腰搬运过程的实际助力效果,邀请了10名成年健康男性工人(年龄(25.1±2.3)岁,身高(173.3±4.3)cm,体重(67.4±6.1)kg)参与了是否穿戴外骨骼的对比模拟搬运实验:15 min内完成90组重复搬运动作,如图6所示。实验过程完成表面肌电信号、耗氧量的采集和主观感知劳累程度的评价。

图6 模拟搬运实验
受试者腰部竖脊肌(Lumbar Erector Spinae,LES)和胸背竖脊肌(Thoracic Erector Spinae,TES)表面肌肉电信号的测试结果如图7所示,纵轴为归一化后的平均肌电信号幅度百分比。穿戴外骨骼后,LES和TES肌肉活动分别减少了31.5%和18.7%。
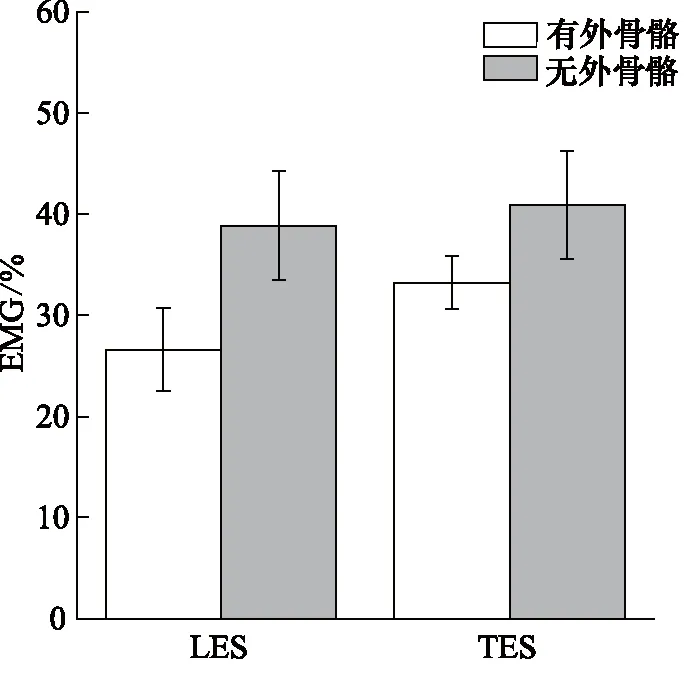
图7 肌电信号数据对比
受试者相对平均耗氧量测试结果如表2所示。利用SPSS软件对采集的有/无外骨骼条件下耗氧量数据进行配对t检验,p>0.05表明是否穿戴该款外骨骼不会造成受试者耗氧量指标的显著差异。
Borg量表通常被用来进行主观疲劳以及劳动负荷的评价,实验中Borg表测试结果如图8所示。经过配对t检验,p=0.011<0.05,对比实验的结果存在显著差异性。15 min结束时有/无外骨骼条件下Borg值分别为(5.45±0.50),(6.65±0.53)。该款外骨骼能降低18%主观疲劳程度。
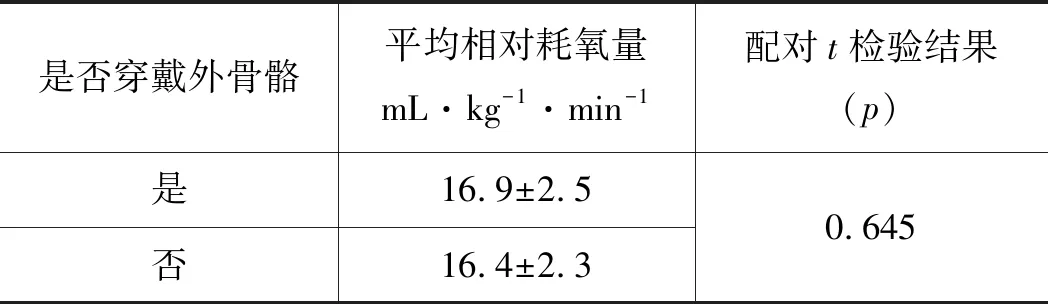
表2 耗氧量数据
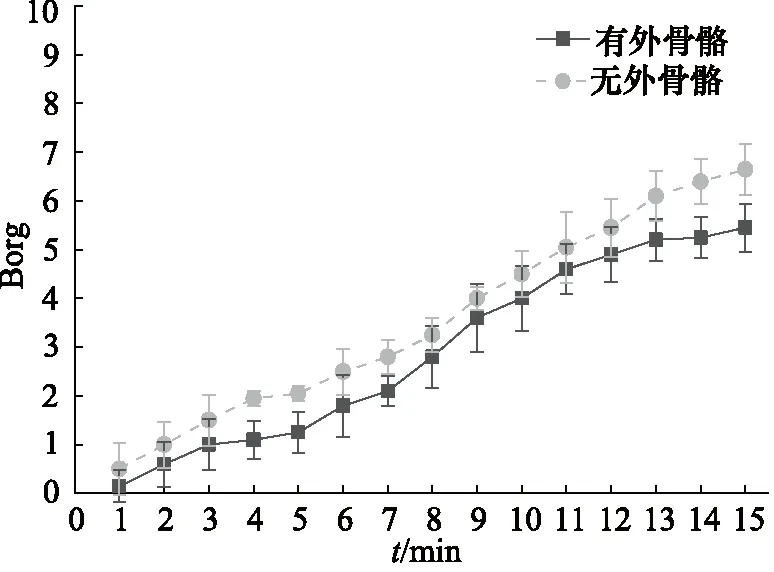
图8 Borg量表对比实验数据
4 结论
被动式搬运辅助外骨骼由于自身的独特优势,在对搬运作业提供助力的前提下,未来在工业领域具备很高的应用价值和市场前景。
(1) 通过建立人体搬运动作的运动学模型和基于人体运动模型的受力分析,得出外骨骼助力效果与所需转矩的关系,为外骨骼结构设计提供理论依据;
(2) 完成了被动式搬运助力外骨骼的结构设计,以凸轮-弹簧的机构组合实现了搬运过程的蓄能与助力;
(3) 设计了模拟搬运对比实验,结果表明该款外骨骼对腰部竖脊肌的实际助力效果达到了31.5%;能够显著降低受试者18%主观感知的疲劳程度;耗氧量指标则无显著差异。
