车联网环境下车辆协同高精度定位研究进展
2021-04-17闵海根宋晓鹏程超轶
闵海根 ,宋晓鹏,程超轶
(1.长安大学信息工程学院,西安 710064;2.“车联网”教育部-中国移动联合实验室,西安 710021; 3.浙江省交通规划设计研究院有限公司,杭州 310017)
1 引 言
近年来,全球关于智能交通系统应用的研究取得了迅速发展,其目标是利用计算机、通信、传感等技术的进步实现更加安全、高效、节约能源、环境友好和舒适的交通系统。由此涌现了一系列新的技术,如导航、各种驾驶辅助技术、车路协同乃至自动驾驶等[1-2]。这些技术的实现往往需要某种定位手段来获得车辆的位置[3]。获取实时、准确的车辆位置信息(如经度、纬度、高度等)是许多智能交通技术的重要组成部分。根据智能车辆的不同应用,对位置信息精度要求进行了分类。其中,导航、地图定位等对位置精度要求较低,误差在10~20 m 范围内即可;协同自适应巡航、协同路口安全、车辆队列行驶等技术对位置精度要求中等,一般要求误差在1~5 m 范围内;车辆碰撞预警、视觉增强、自动泊车等技术对位置精度要求高,要求误差在1 m 以内;当今无人驾驶技术的迅速发展对车辆的定位需求则更高,误差一般要控制在20 cm 以内[4]。这些技术日渐发展和普及的过程对车辆定位的准确性、稳定性和广泛的可达性提出了更高的要求。更好的车辆定位服务已经成为智能交通系统飞速发展大背景下的迫切需求。
随着车载测量传感器的种类不断丰富,基于多源传感器融合的车辆自主定位方法已经有许多研究和相关成果。仅依靠单车自主定位方法仍然无法有效解决城市峡谷和长隧道等复杂环境的车辆全尺度定位问题。本文首先分析了当前单车自主定位方法及其应用,然后深入研究了多车协同定位中的协同定位框架、目标关联算法及多车协同融合算法,并对协同定位研究的难点和未来发展趋势进行了分析与展望。
2 车辆自主定位研究方法现状
目前全球导航卫星系统(Global Navigation Satellite System, GNSS)已经普及并且广泛用于为车辆提供位置服务,如美国的全球定位系统(GPS)、欧洲伽利略(GALILEO)、俄罗斯格洛纳斯(GLONASS)和中国的北斗[5]。在2020年6月,中国北斗三号系统最后一颗组网卫星发射成功,标志着北斗全球导航系统星座部署完成,共有55 颗导航卫星在轨提供定位授时服务[6]。GNSS定位是一种便捷和成本低廉的定位方式,但具有诸多的局限性:一方面,它的误差水平一般在10 m 左右,该定位精度不能满足当前自动驾驶或其他许多智能交通应用;另一方面,其受环境因素影响大,比如建筑物遮挡、大气层干扰等因素都会使得GNSS 定位的可靠性和稳定性下降。因此,需要更多的定位手段来弥补GNSS 定位的不足。
在车辆自主定位方法中,基于视觉和激光的即时定位与地图构建(Simultaneous Localization and Mapping, SLAM)技术的研究和发展[7-8]推动了室内移动机器人、封闭园区低速物流配送车和无人驾驶观光车应用的发展和产业化落地。在视觉SLAM 研究领域,出现了许多杰出的工作。Mur- Artal 等人[9]提出了一种基于特征的单目 ORB- SLAM 系统,该系统选择特征点和关键帧并获得良好的性能,该系统可在小型和大型室内和室外环境中实时运行。LSD-SLAM[10]和DSO[11]放弃使用图像特征检测过程,而直接使用传感器在特定时间段内从某个方向接收的光度值来计算相机的移动,依靠图像像素的一致性,包括角落、边缘和高纹理区域,利用光照不变性方法消除了亮度变化的影响。激光测量具有更好的稳定性和精确性,当前有许多实际产品基于激光SLAM 来实现定位和导航。Zhang 等人[12]利用曲率值来区分激光数据的边缘点和平面点,对提取的激光特征点进行匹配和筛选,通过正态分布变换(Normal Distribution Transform, NDT)[13]算法来寻找点云之间的最佳匹配关系并计算运动信息,但是该方法累积误差较大,对环境要求较为严格。在前期工作的基础上,Zhang 等人[14]融合图像和激光数据构建环境地图,得到了在剧烈运动情况下仍可以高精度定位的结果。Ye 等人[15]提出了一种激光雷达(Light Detection and Ranging, LiDAR)和惯性测量单元(Inertial Measurement Unit, IMU)紧耦合融合方法,即使在快速运动或特征不足的情况下,该方法也能获得很好的表现。Shan 等人[16]提出了一种轻量级的SLAM 方法,可以在低功耗嵌入式系统上实现实时姿态估计。随着计算机视觉中深度学习(Deep Learning, DL)的发展,一些研究人员已将DL 引入SLAM 系统中用来完成语义分析、重定位或深度特征检测等工作,如文献所提到的系统所示[17-18]。基于SLAM 技术的定位,要求环境中要有丰富的可检测特征。对于空旷的环境,如空旷的广场,会因为缺少有效特征而出现匹配失败;对于高度重复单一的环境,如长隧道,会出现匹配错误。
研究者认识到,单一的传感器无法克服复杂环境下定位不稳定和精度差的问题,引入性能互补的GPS、IMU、轮速、相机、激光雷达等多模态传感器的融合[19-21],用低精度的传感器实现了厘米级定位,且在没有GPS 信号的隧道、地库等场所,定位系统也能正常运行,摆脱了对RTK 的依赖,如图1 所示。面向自动驾驶的高精度地图采集与制作,正是利用了多传感器性能互补的特点,按照数据采集、数据处理、元素识别和人工验证的流程进行制作[22]。基于高精度地图的车辆定位,结合卫星定位和特征定位互为冗余与补充的特性,实现车辆高精度高可靠定位[23-24]。
3 车辆协同定位技术研究现状
车辆自主定位方法仅依靠单车车载传感器有限的观测信息,实现高动态、复杂环境下的车辆高精度定位仍存在挑战。随着无线通信技术的发展,利用长期演进技术-车辆(Long Term Evolution-Vehicle, LTE-V)通信或专用短程通信(Dedicated Short Range Communication, DSRC)可实现车-车和车-路V2X 通信[25]。5G 基站建设的完善,推动了下一代移动通信技术在智能交通中的应用。利用5G 低延时、大带宽的通信特点,可实现车联网环境下大数据量的即时传输。这些无线通信技术为车辆协同定位提供了信息交互管道,更多的观测信息量有助于提高车辆定位精度。
3.1 协同定位框架研究
车辆协同定位系统主要由传感器数据获取、车-车/车-路通信、测量目标关联和协同数据融合四大模块组成。协同定位框架如图2 所示。
(1)传感器数据获取模块:目前用于车辆定位的传感器主要有GNSS、惯性导航系统、激光雷达、毫米波雷达、相机和轮速传感器。GNSS用于获得车辆的绝对位置坐标,利用惯性导航系统弥补卫星信号短时间内不可用的缺点,在特征丰富的环境下基于激光雷达、相机、毫米波雷达进行相对定位可以获得较高的定位精度,轮速传感器提供辅助定位信息可提高系统稳定性[20,26]。
(2)车-车无线通信系统:通过 LTE-V、DSRC 或第五代无线通信系统(5G),车辆之间可以进行信息的传递[27-28],通过车-车通信向附近环境车辆发送本车的绝对位置和本车车载传感器测量得到的环境车辆相对位置信息;通过车-路通信接收到路侧分享的绝对位置和路侧传感器检测的车辆目标相对位置信息。
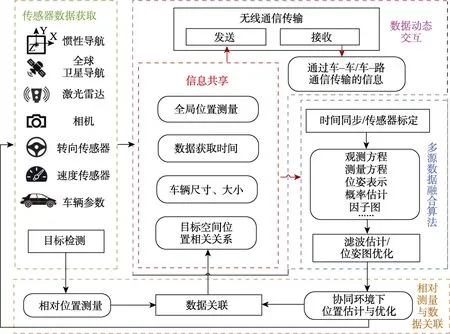
图2 协同定位总体框架图Fig.2 Cooperative localization framework
(3)测量目标关联模块:该部分主要解决的问题是确定通信接收到的车辆目标与车载传感器探测到的车辆目标之间的对应关系[29-30]。在关联过程中,一方面可以利用检测的目标特征,另一方面可以结合目标自身的位置、航向等属性。根据车辆周围环境,自适应调整参与数据共享的邻居车辆或路侧节点数。
(4)协同数据融合算法:在协同定位中,融合结合多车间带噪声的绝对位置和相对位置信息,融合估计出更加准确的本车和环境车辆绝对位置[31-32]。在数据融合中,需要考虑多模态传感器同步问题和传感器标定关键问题。数据时间不同步问题会影响每一级信息融合结果的精度,从而影响车辆定位的可信度。传感器标定是融合的基础,实现各传感器坐标系之间的快速转换,统一描述。
3.2 目标关联算法研究
在目标关联算法研究方面,已经有许多成熟的算法可以利用,如最近邻数据关联算法(NNDA)、概率数据关联算法(PDAF)、联合概率数据关联算法(JPDAF),基于深度学习的数据驱动目标关联算法在近几年也被广泛关注。目标关联算法流程如图3 所示。
NNDA[33]主要解决关联门[34]的大小和关联门内目标匹配这两个问题,关联门就是以上一帧的跟踪目标为中心划分的空间区域。最近邻数据关联的基本思想是把关联门作为图像搜索空间的子空间,在关联门内选用与关联门中心最近的目标作为匹配,其他所有的目标都不予考虑,把它们当作其他跟踪目标的匹配。PDAF[35]的主要思想是将关联门中所有量测进行概率意义上的加权平均作为滤波输出,主要限制在于只能对单个目标进行关联。JPDAF[36]在关联概率的计算过程中考虑到了因噪声引起的误检、虚检等因素,因此目标跟踪的准确度有所提升,但是当场景中需要关联的目标数量较多时,该算法计算量呈指数增长。近年来,出现了基于深度学习方法的目标关联方法研究。Li 等人[37]推广的网络流方法从深度学习的角度重新审视目标关联问题。通过深度神经网络,可以有效地学习一元和成对链路代价的参数,将原线性规划转化成两级优化问题。Philippe 等人[38]通过深度匹配算法获得特征,通过逻辑回归学习边缘成本,深度匹配使用经过训练的卷积神经网络(Convolutional Neural Network, CNN)来提取关联特征,在DeepFlow[38]算法中得到了应用,用于学习大位移光流,计算输入特征之间的时间相关性。
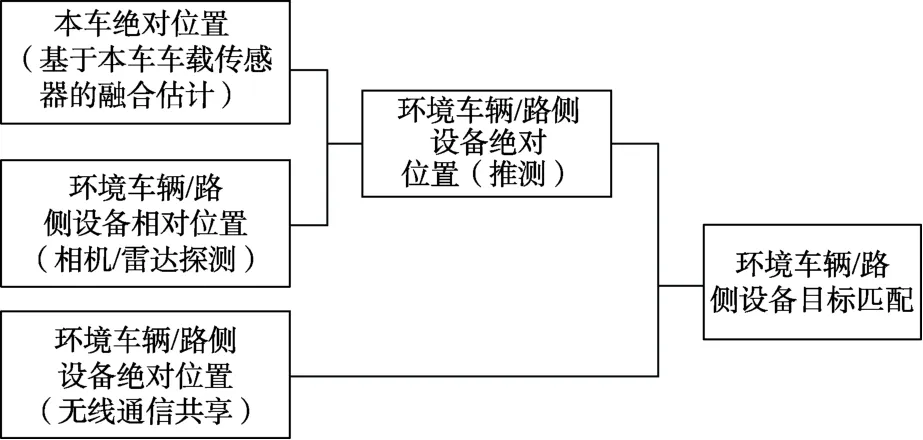
图3 目标关联算法流程Fig.3 Data association algorithm flowchart
3.3 多车协同融合算法研究
利用融合算法实现多传感器信息互补,从而实现高精度和稳定的定位系统。Li 等人[39]对路侧单元(Road Side Unit, RSU)通过Wi-Fi 发布局部地图信息,配备GPS 接收器的车载单元(On Board Unit, OBU)和Wi-Fi 设备接收地图,并利用地图匹配算法在地图上进行定位,得到精确的位置信息。Qian 等人[40]使用扫描栅格地图的方法实现相对定位,结合实时动态载波相位差分技术(Real Time Kinematic, RTK)提出了一种相对定位联合绝对定位的融合定位方案。文献[41]和[42]中引入了基于EKF 的协同定位算法,当环境中节点数目较多时,对于每个获取数据的时间点,每个节点测量值数量高达N(N- 1),其中N是环境中的节点数目,集中式协同定位方法数据处理的计算复杂度可达到O(n4)。Zhou 等人[43]表明,通过使用Householder QR 算法的改进版本,基于EKF 的协同定位的计算复杂度可以从O(n4)降低到O(n3)。分散式系统将数据处理的任务分配给多个系统节点,以减少系统融合中心的压力。文献[44]在[41]的基础上给出了同步的分布式扩展方法。Arambel等人[45]提出了一种基于协方差交集的同步多中心算法,用于未知相关估计的一致性融合。
融合定位系统不是简单地对各种定位传感器输出叠加,需要深入研究智能融合技术,综合实现最优的定位性能。图4 展示了基于卡尔曼滤波的多源信息融合框架。
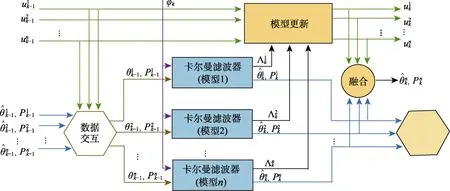
图4 基于卡尔曼滤波的多源信息融合框架Fig.4 Multi-source data fusion based on Kalman filter
在实际融合方案中,可以将位置估计分为两个阶段。首先进行基于本车位置信息的粗估计,将粗估计的结果通过车-车通信进行分享,然后进行综合多车位置信息的融合估计。相比于直接通过车-车通信分享观测信息,在通信前先进行粗估计(预处理)的方法有利于提高通信获得的他车信息准确性,进而也有利于改善融合估计的效果。
4 结 论
在城市环境下,建筑物、立交桥的遮挡会产生多径信号,影响卫星信号直射径的提取精度,从而影响定位的准确性。车辆高精度高可靠定位是智能汽车发展的核心关键技术,利用多模态传感器融合可实现一般场景下的高精度定位,协同定位为复杂场景下的车辆定位提供了技术支撑。 随着通信技术的快速发展,5G 凭借其大通信带宽、高数据传输速率的特点得到关注和研究。5G不仅可为车辆协同定位提供了数据交互的通道,其本身还具有定位能力。随着5G 基站建设的加快,可充分利用5G 网络的通信管道和平台优势,融合多种异构定位技术,实现多模态信息优势互补,完成通信和定位一体化。
在协同定位系统中,除了本文中所述的目标关联和数据融合算法关键技术外,还需要考虑诸如传感器测量不确定性、通信延时、传感器故障诊断和容错控制等对系统精度和稳定性的影响[46]。还可以结合人工智能(AI)技术,在协同网络环境中采用多径信号辅助的AI 建图与定位,从多径信号中提取环境静态特征为定位提供更多的参考基准点,或者利用多车协同进一步提高静态特征的提取精度,从而提高定位精度。
