船载四轴天线的伺服跟踪方法
2021-04-14张凤
张 凤
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
0 引 言
随着天线市场的不断发展,用户对天线各种指标的要求也随之提高,希望整个天线系统简单便捷,同时也便于使用理解和后期的故障判断维修。为了准确对准卫星实现通信链路的稳定连续,对提高跟踪精度研究的方法也越来越多。然而,现实情况下,由于各种不可避免的误差,天线加工的误差、安装误差等导致指向精度低,用户的使用体验差。基于上述原因,为不断提高跟踪精度、优化各种算法,从大地系到座架系折算的算法也越来越复杂,指向精度有所提高,同时也引入了很多的外界误差。本文提出了一种四轴天线的伺服跟踪算法,该算法简洁易懂、易实现,并且跟踪精度不丢失。
1 船载天线系统
船载天线系统主要由舱外设备、舱内设备、接收机以及惯导系统组成,如图1所示。舱外设备包含天线设备,由方位、俯仰、横摇以及纵摇四轴组成。舱内设备包含天线控制单元,负责采集天线的各种设备状态信息,接收惯导系统的经度、纬度、航向、横倾、纵倾数据以及接收机的信噪比、锁定信号,控制天线完成跟踪捕获[1]。
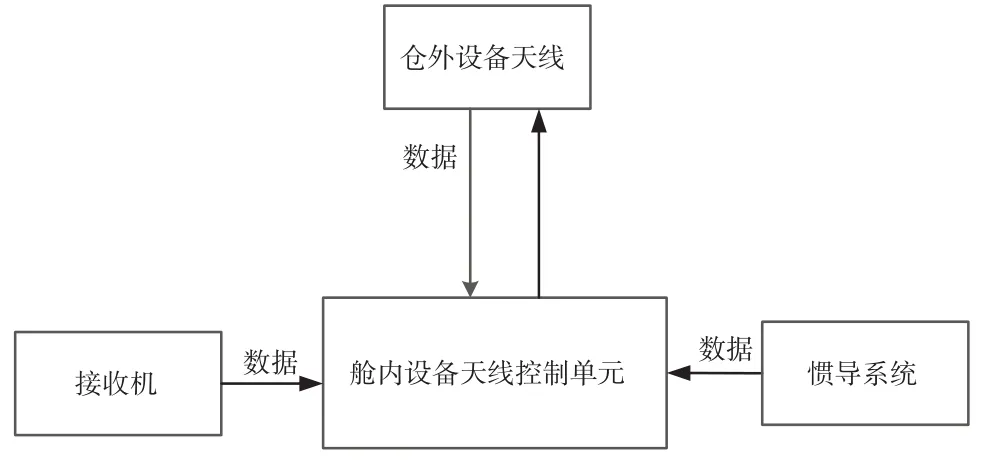
图1 天线系统组成
2 跟踪工作原理
2.1 传统三轴天线跟踪原理
根据目标卫星的经度以及载体的经度、纬度计算出目标理论指向方位地理角和俯仰地理角,根据计算得出的地理角以及载体的姿态数据,将横摇、纵摇、航向转换到甲板坐标系得到方位、俯仰、交叉甲板角,同时能够隔离姿态的影响,用于引导天线进行理论指向[2]。
卫星理论的方位地理角AZGeo、俯仰地理角ELGeo经过地理坐标系到载体坐标系的变换得到目标的方位座架角度AZDeck、俯仰座架角度ELDeck以及交叉座架角度CroDeck,用于天线的跟踪。
在跟踪过程中,天线控制单元根据计算获得的方位、俯仰、交叉座架角度捕获到位后,稳定10 s后转入搜索。搜索过程中,以对星理论角度为搜索中心,同时以一定的速度和范围分别在方位和俯仰两个方向上进行两个周期的步进搜索,搜索范围可以根据不同的阶段逐步缩小或者放大。每次搜索都以上次搜索信号最大点为中心点,直到找到信号的最大点后转入跟踪,如果搜索过程中无法找到信号,则转入稳定指向。
2.2 船载四轴天线介绍
传统船载天线一般为方位-俯仰两轴天线或者方位-俯仰-交叉三轴天线,船载四轴天线则是由方位-俯仰-横摇-纵摇四轴组成,横摇纵摇用于载体姿态隔离,方位轴和俯仰轴用于跟踪,跟踪计算时无需坐标变换。为了能够实现精准跟踪,保证通信链路的连续,需要对4个轴的零位进行精准标定,直接关系到跟踪精度的高低。
2.3 机械轴零位标定
天线在加工装配时,横摇、纵摇、方位配备了零位孔,选择符合孔径的定位销插进定位孔,定位销在孔内能够保持不晃动,此时为机械标校零位。俯仰轴配备了45°的定位孔,定位销在孔内保持不晃动,此位置为俯仰轴45°。机械标定的过程中存在加工误差,导致角度有所偏差,为了提高天线的跟踪精度,需要再次进行信号标定。首先跟踪不同卫星,多次对比卫星实际跟踪信号最大值的角度与理论指向角度,得到两者之间的差值。其次在天线控制单元中配置软件的标校参数,将上述差值进行修正,进而完成天线四轴的机械标校。
2.4 伺服控制流程
根据天线控制单元设置的星位和收到的定位信息,包括经度、纬度计算目标的理论角度,然后再根据载体的姿态信息,包括航向Heading、横摇Roll、纵摇Pitch以及在当前位置卫星的方位理论角度AZGeo、俯仰理论角度ELGeo。通过坐标转换得到天线方位座架角度AZDeck、俯仰座架角度ELDeck、横摇座架角度XDeck以及纵摇座架角度YDeck。天线的横摇轴和纵摇轴用于使天线保持在水平的位置,隔离载体的横倾、纵倾影响,方位轴用于隔离航向的影响,俯仰轴保持理论指向。驱动器驱动方位、俯仰、横摇、纵摇进行转动保持目标指向,伺服驱动控制流程如图2所示,角度转换的计算方式为:
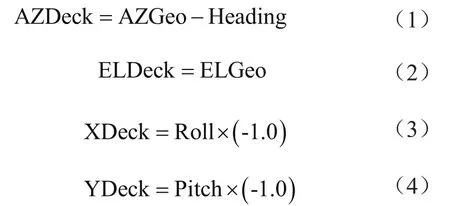
图2中,Aj为天线理论角度,Aj0为天线当前角度,As为天线理论速度,As0为天线当前速度,AI为天线理论计算电流,AI0为天线电机实际电流。
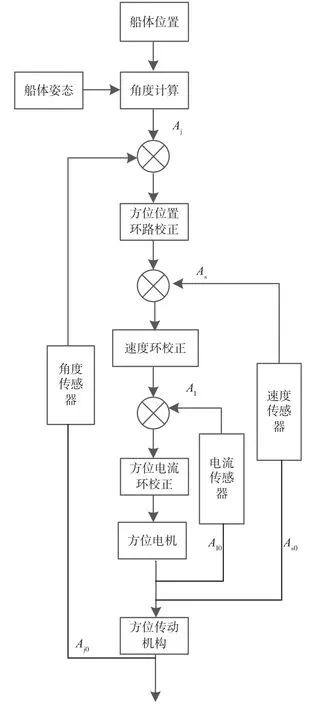
图2 伺服驱动控制流程
天线的伺服驱动控制中,电流环和速度环是提高伺服性能的关键因素,主要靠伺服驱动器完成。因此,伺服驱动器的性能优劣也会影响伺服跟踪精度的高低,电流环通过产生的电流来控制电机,速度环主要用来提高带宽[3,4]。
2.5 跟踪流程
天线捕获到位后转入到搜索过程(图3),接收机连续锁定一定时间后表示搜索成功转入下一阶段,如果接收机未锁定则先进行小范围搜索,方位轴俯仰轴在给定的范围和速度内进行三角形搜索[5]。在此过程中,接收机锁定则转入下一阶段,否则完成搜索圈数后搜索失败,结束搜索过程。在跟踪过程中如果目标丢失则接收机失锁,保持指向当前位置一定时间,一定时间后若接收机还未锁定,则转入重新捕获,如果接收机重新锁定,则转入搜索过程[6,7]。跟踪流程如图4所示,搜索失败后转入指向跟踪的流程如图5所示。
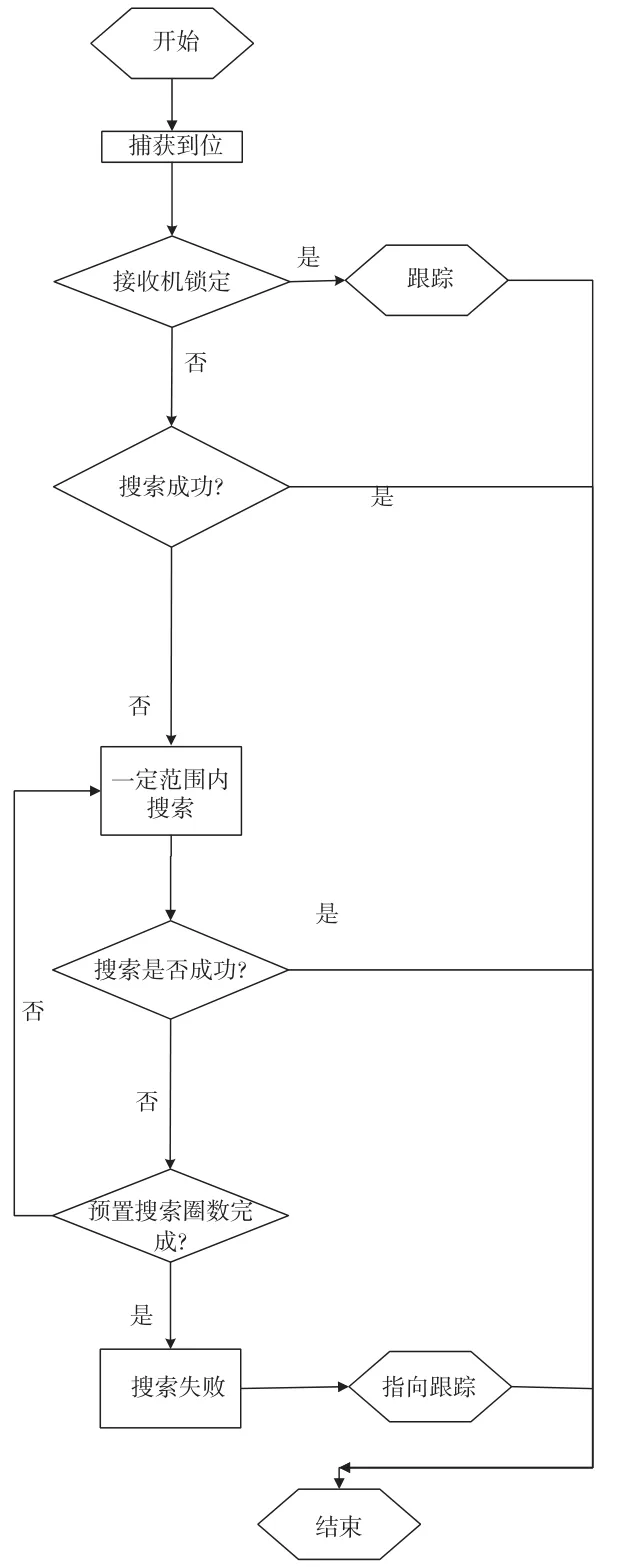
图3 搜索过程
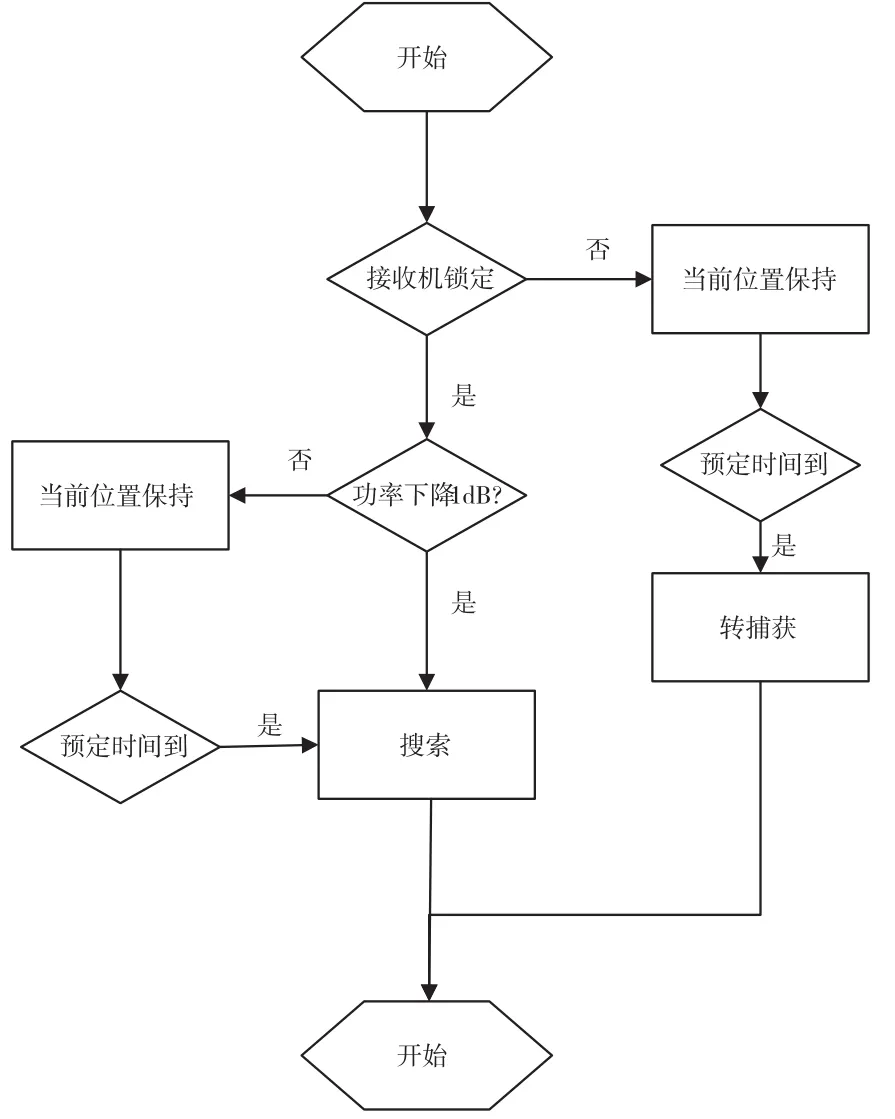
图4 跟踪流程图
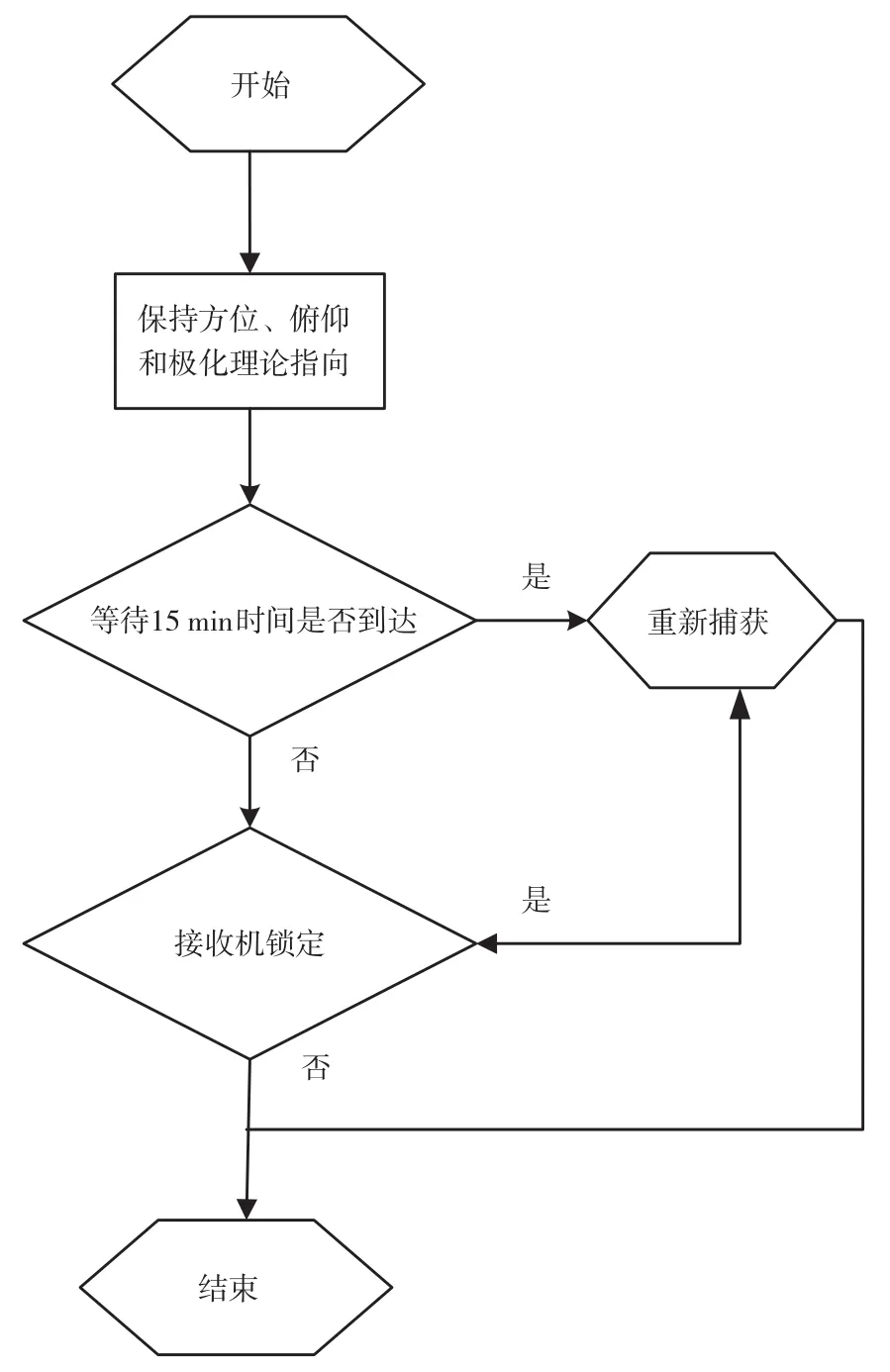
图5 指向跟踪流程
3 结 语
四轴天线通过横摇轴和纵摇轴隔离姿态的影响,保证天线AE始终在水平方向。根据上述设计跟踪流程可以实现天线的精准跟踪,保证通信链路的连续与畅通。增加的横摇轴和纵摇轴大大简化了传统复杂的坐标变换,并在实际天线的应用实践中得到了充分验证,从而实现了理论的产生到实践应用的整个过程。
