一种基于自适应卡尔曼滤波的ADS-B点迹跟踪处理方法
2021-04-12四川九洲空管科技有限责任公司杜世勇
四川九洲空管科技有限责任公司 杜世勇 李 枢 唐 川
广播式自动相关监视技术(ADS-B),是基于卫星定位数据,通过地空、空空数据链通信对外广播本机状态信息,并接收其他飞机信息的空管监视技术。针对密集飞行的点迹跟踪处理问题,建立了基于ADS-B监视的密集飞行模型,采用了一种基于“当前”统计模型的自适应卡尔曼滤波算法进行点迹数据处理。仿真结果表明:自适应卡尔曼滤波算法在收敛速度和跟踪精度方面优于常规卡尔曼滤波算法,适合密集飞行目标的近距离跟踪。
ADS-B监视技术具有信息多样、数据精度高、抗干扰能力强等优点,相对于一、二次监视雷达,其无需主动发射探测或询问信号,仅通过侦听空域中的ADS-B广播信号,既可完成监视和跟踪。本文基于密集飞行特点,建立了基于ADS-B监视的密集飞行模型,采用了一种基于“当前”统计模型的自适应卡尔曼滤波算法进行点迹处理并进行算法仿真,仿真结果表明该算法能快速收敛并且能有效提升目标飞机跟踪的精度,满足对目标飞机进行实时、高精度跟踪的要求,具有良好的工程适用性。
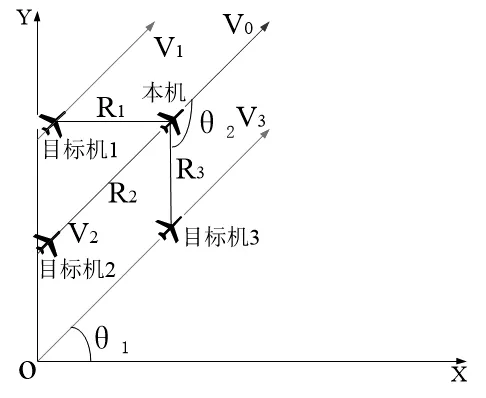
图1 密集飞行场景示意图
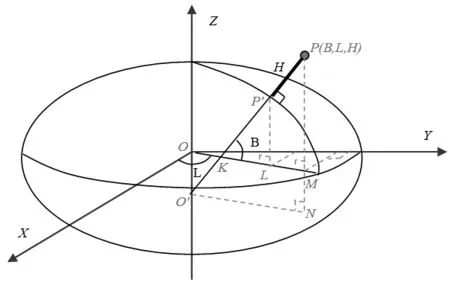
图2 WGS-84大地坐标系与空间直角坐标系的转换
1 基于ADS-B监视的飞行模型
密集飞行场景示意图如图1所示。V0为本机速度矢量,V1~V3为目标飞机速度矢量,R1~R3为目标机和本机的间距,θ1为目标机3的航向角,θ2为目标机3相对于本机所处的方位角。
由于ADS-B消息提供的目标机三维位置数据采用WGS-84大地坐标系,即经度、纬度、高度,而机载监视设备对目标飞机的跟踪采用的是空间直角坐标系,因此,在对目标机航迹进行处理之前首先需要将目标机的大地坐标转换为空间直角坐标,转换关系如图2所示。
若目标机的WGS-84大地坐标为P(B,L,H),将其分别投影到直角坐标系中,得到空间直角坐标(X,Y,Z),转换关系如下:
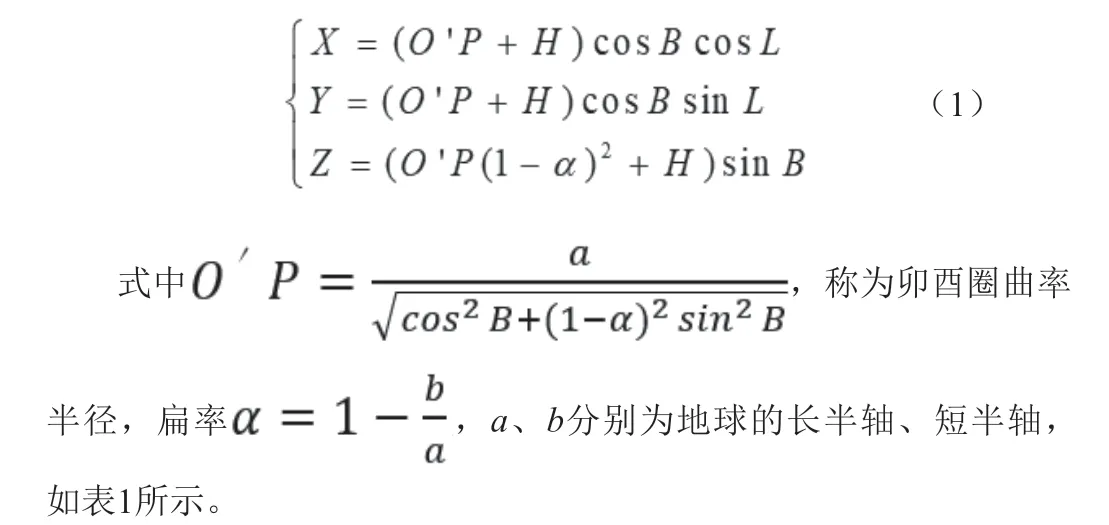

表1 WGS-84的2个基本常数
2 基于“当前”统计模型的自适应卡尔曼滤波算法
跟踪机动目标较为有效的单模型方法是“当前”统计模型。“当前统计”模型算法的基本思想是,当目标当前时刻正以某一加速度机动时,它下一瞬时的加速度取值范围是有限的,而且处于“当前”加速度领域内。“当前”统计模型,即机动加速度的非零均值时间相关模型,其概率密度由修正瑞利分布来描述,利用瑞利分布随均值而变化,方差由均值决定的特点,令加速度均值等于当前时刻的加速度预测值,实现了均值和方差自适应滤波。自适应卡尔曼滤波方程如下:

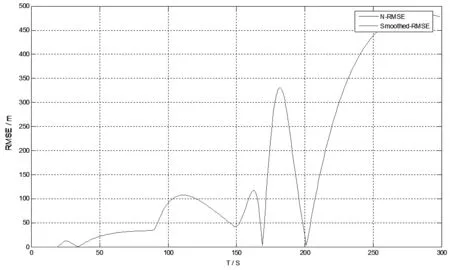
图3 采用常规卡尔曼滤波算法仿真

图4 采用自适应卡尔曼滤波算法仿真
其中,(2)为一步预测估计值方程,(3)为一步预测误差协方差方程,(4)为卡尔曼增益,(5)为最优估计值方程,(6)为最优滤波误差协方差方程。
经常参加体育锻炼可以培养与人合作的个性和坚忍不拔的健康人格,群体活动能够增加人与人之间的交往,消除孤独感,并使心情愉悦,获得满足。
状态转移矩阵:

结论:本文在ADS-B监视技术的基础上,针对密集飞行的高精度、实时性跟踪问题,建立了密集飞行的数学模型,并选用了一种基于“当前”统计模型的自适应卡尔曼滤波算法进行点迹处理。仿真结果表明,在跟踪机动飞行目标的问题上自适应卡尔曼滤波算法具有收敛速度快、滤波精度高的优点,跟踪性能优于常规卡尔曼滤波,满足密集飞行时对目标飞机的跟踪要求。
