舵机系统工作模态特性仿真
2021-04-09李杰光王春艳段丽华朱剑波
李杰光,梁 建,王春艳,段丽华,朱剑波
(1 中国空空导弹研究院, 河南 洛阳 471009; 2 河南科技大学 软件学院, 河南 洛阳 471003)
高速飞行的导弹依靠作用于舵面的气体来流形成铰链力矩稳定和控制弹体,使导弹按需要的弹道飞行。舵系统作为导弹飞控系统的执行机构,其性能的好坏直接决定了导弹飞行过程的动态品质。导弹高速飞行过程中舵面气动力、弹性力与惯性力存在耦合作用,舵面气动载荷改变舵系统刚度和动态特性,当相对气流速度超过临界速度时,瞬时气动载荷可使舵面振动失稳,从而发生颤振[1-3]。
由于电动舵机技术具有成本低、动态特性好、易于控制等优点,使得其在导弹舵系统中得到广泛应用。随着导弹对舵系统传动精度、响应速度和稳定性要求的不断提高,舵系统的动态特性、输出响应和振动稳定性的影响变得越加突出。舵机传动机构零部件存在的间隙与弹性变化增大了传动机构的非线性因素,使得舵系统响应曲线出现滞后和削波[4,5]。随着导弹攻角和飞行马赫数的增加,舵面与气动力的耦合作用,使得舵面振动位移趋向于临界振动状态[6]。舵机传动机构各环节的接触刚度、阻尼、间隙等因素会影响舵系统的动态特性,且传动链末级参数对系统动态特性的影响更为明显[7,8]。对舵机传动机构进行优化设计,合理控制间隙、摩擦、弹性变形等非线性因素,可有效降低舵机控制模块和导弹控制系统的复杂度,降低系统成本[9]。
近年来,多学科仿真与虚拟样机技术在航空航天领域设计研发中的优势日益突显。空空导弹作为现代主流空战精确制导武器,在舵系统气动力载荷、传动机构动态响应、结构的弹性变形方面的系统性研究较少[10]。因此,本文针对某型空空导弹单通道舵系统传动机构进行动态特性、结构弹性变形、舵面气动力研究,研究结果对系统设计和工程应用具有指导意义。
1 舵面颤振/动力学仿真建模
1.1 理论方程
在线性不发生改变的条件下,对于一连续的、非线性物理结构描述的自由振动方程为:
M·x(t)+C·x(t)+K·x(t)=f(t)
式中:M表示系统质量矩阵列;C表示系统阻尼矩阵;K表示系统刚度矩陈;x(t)表示系统位移响应向量;f(t)表示系统激励力的向量。


1.2 动力学仿真建模与验证
弹载计算机发出的飞控信号经由控制器和功率放大器控制电机转动,电机转矩经由两级齿轮传动和滚珠丝杠副减速,丝杠螺母带动摇臂摆动,摇臂带动舵轴转动,最终由舵轴控制舵面的偏转位置角度。依据舵机传动机构工作原理建立动力学仿真模型,动力学仿真模型简图如图1所示,动力学仿真模型环节设置如图2所示。

图1 舵机传动机构动力学模型简图

图2 动力学模型环节设置示意图
两级齿轮传动的弹性变形可等效简化为输出级齿轮内外圈间的扭转弹簧,扭转弹簧刚度K1=1×104N·m/(°),阻尼c1=2.1×10-6N·m·s/°。丝杠两端轴承可等效为两个阻尼器,刚度K3=1.0×108N/m,阻尼c3=10 N·s/m。丝杠螺母与拨叉间定义为三向力,间隙可采用BISTOP函数进行模拟,刚度K2=4.2×108N/m,阻尼c2=2.1×102N·s/m,间隙e=5×10-4m[11]。舵轴两端由两轴承支承,动力学建模时将靠近舵面一端的轴承等效为球铰副,远离舵面一端的轴承等效为阻尼器,通过设定阻尼器刚度值可模拟轴承刚度的变化。阻尼器刚度K4=1.0×108N/m,阻尼c4=100 N·s/m。将传动机构的摩擦阻力可等效为舵轴与本体间的摩擦力矩,模型中可将摩擦力矩施加于舵机与本体间的球铰副,舵轴与本体间初始摩擦力矩设置为Ff=6 N·m。
舵机传动机构动力学模型输入、输出通道数据采集点位置如图3所示。其中点I处为输入通道,点O1~O8处为输出通道,舵面坐标系定义如图3中所示。
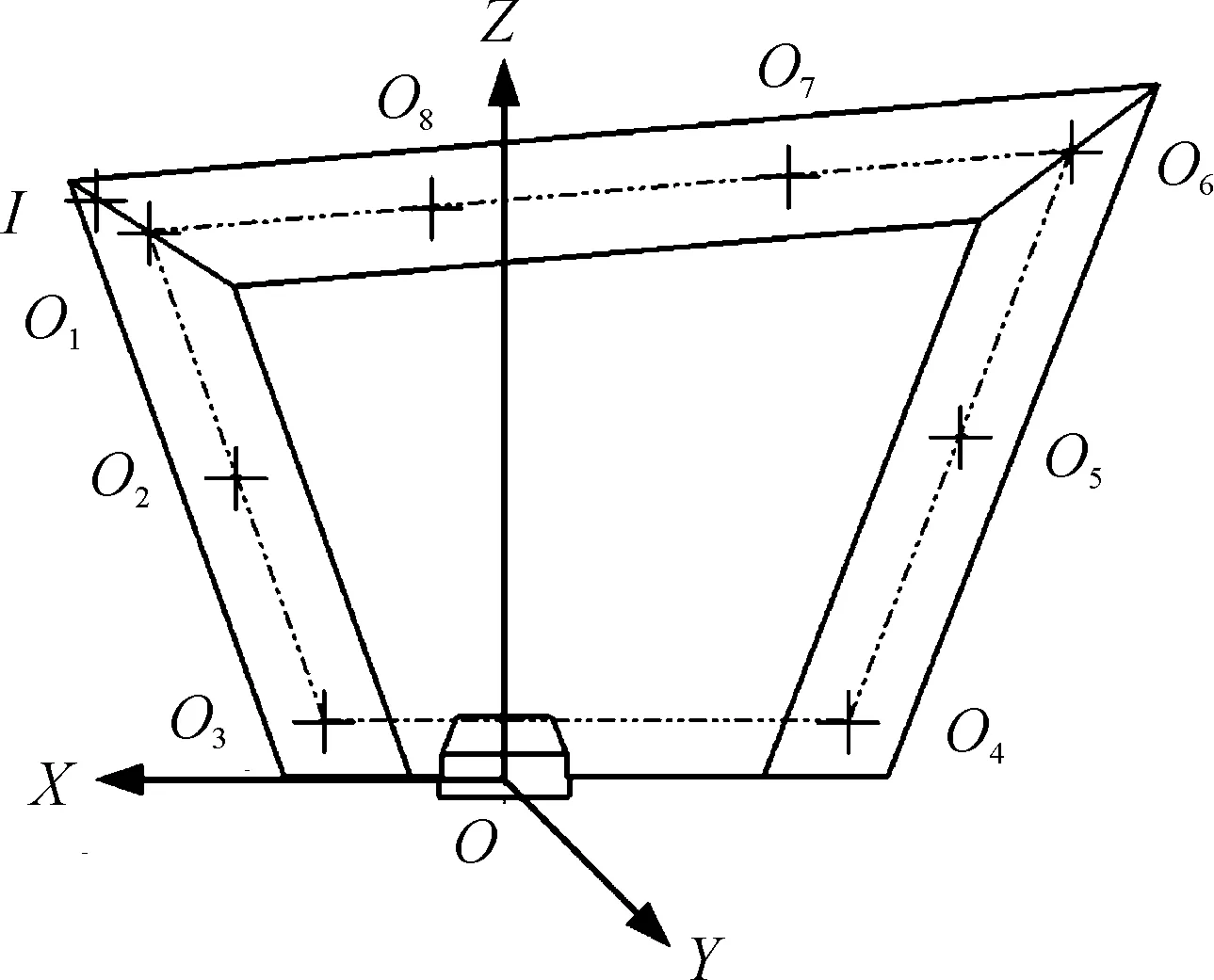
图3 舵面振动输入、输出通道数据采集点位置示意图
由参考文献[7]可知,舵系统传动机构一阶振型为舵面弯曲振动,二阶振型为舵面扭转振动。工程中主要关注前两阶模态频率,本文中选取前两阶模态仿真结果与实验结果进行了对比,以达以模型验证的目的。仿真计算得出的舵机传动机构各阶模态与振型描述如表1所示。
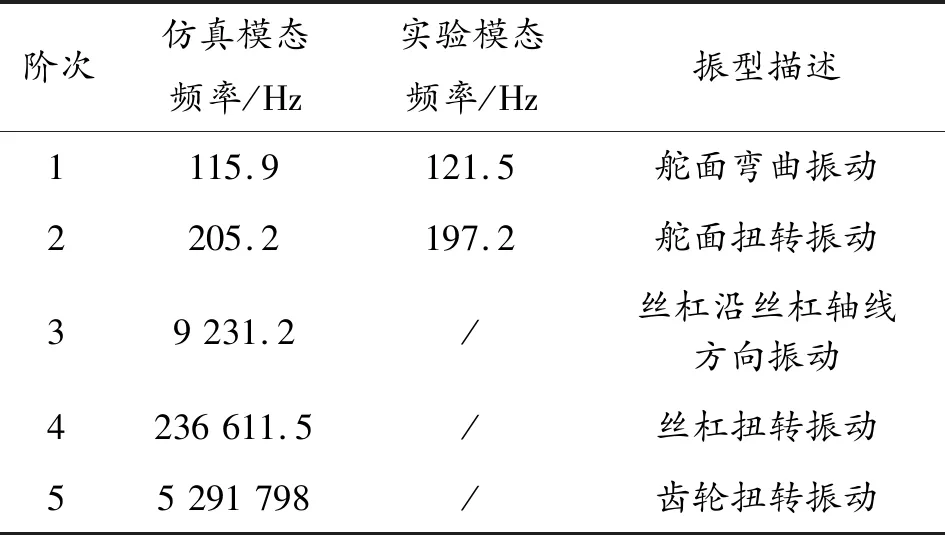
表1 各阶模态频率及振型描述
传动机构模态数值与实验结果对比,一阶模态差为5%以内,二阶模态差为5%以内,从而验证动力学仿真模型建模的正确性。
1.3 气动力仿真建模
导弹飞行3马赫数飞行,攻角为30°时,舵机与气动力双向流固耦合模型。舵面与气动力流固耦合仿真模型如图4所示,具体模型参数设置参见参考文献[6]。
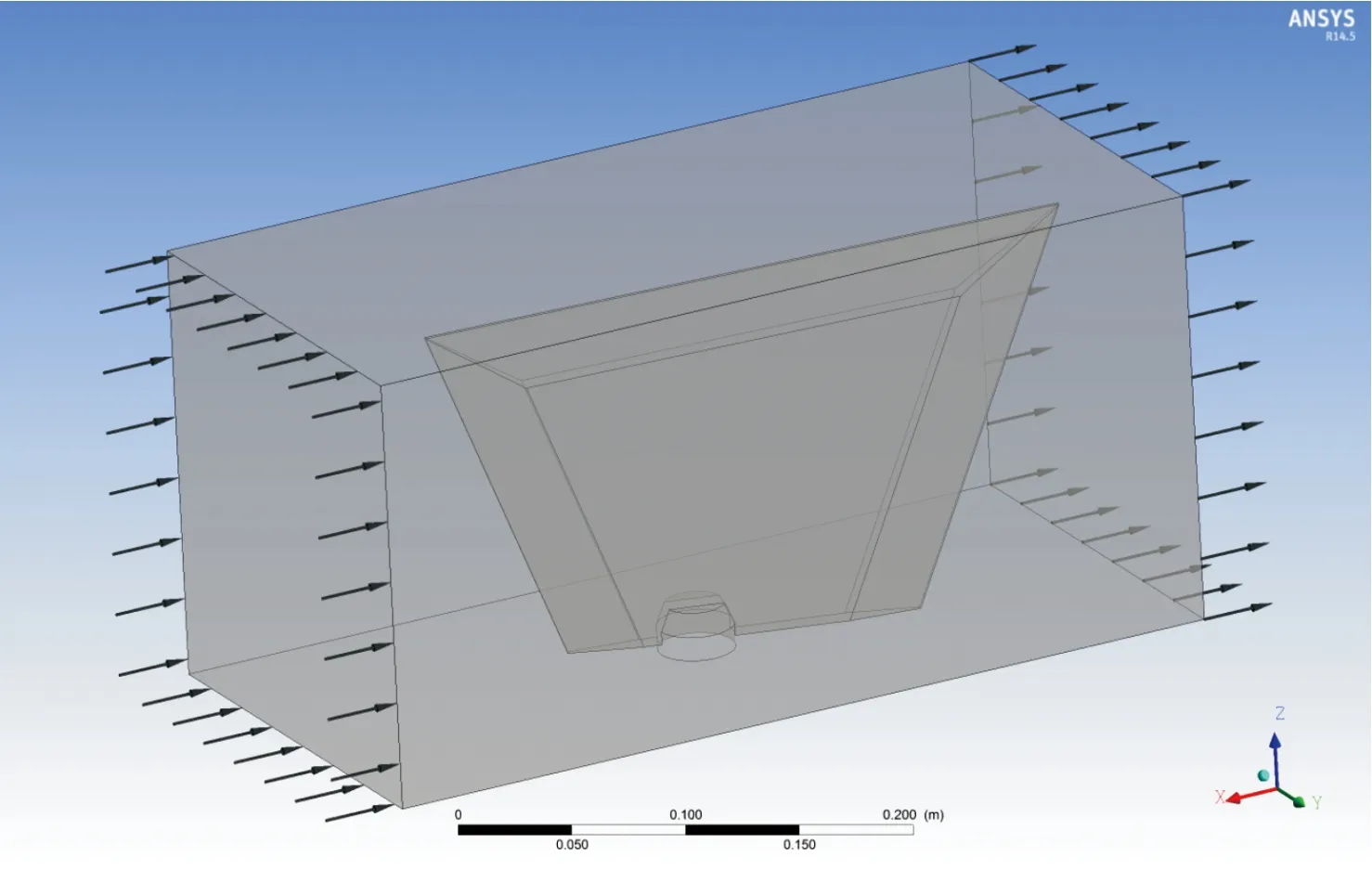
图4 舵面与气动力流固耦合仿真模型示意图
双向流固耦合气动力作用点坐标:(14.8,-6.4,59.7),单位:mm。对比X、Y、Z三方向作用力值,Y方向作用气动力对舵面振动最为显著,因此,选取Y向气动载荷作用舵面外部激励。导弹飞行速度为3马赫,攻角为30°时,气动力Y向分量变化曲线如图5所示。
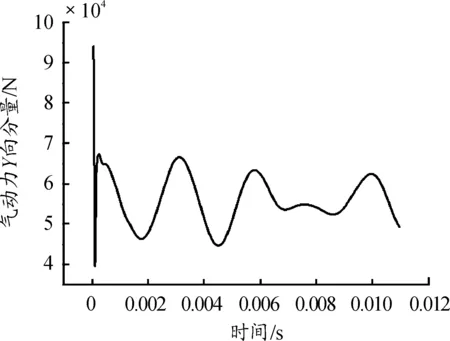
图5 舵面Y向气动力变化曲线
1.4 刚柔耦合仿真建模
为获得刚柔耦合对舵系统模态频率的影响关系,需对舵系统重要零部件进行柔性化处理,选取舵系统传动机构中拨叉为柔性化处理对象。
采用ANSYS软件对拨叉进行模态中性文件(mnf文件)生成,采用Adams软件将零件的mnf文件导入动力学模型中对拨叉进行柔性化处理。生成mnf文件过程中,不同材料参数可通过设置有限元单元属性进行调整。摇臂与外部刚体的连接点分别选择位于摇臂回转轴和丝杠螺母中心处,摇臂的网格模型及外部连接点如图6所示。

图6 摇臂刚柔耦合模型示意图
运用Adams的Flexible Bodies单元导入mnf文件将刚体模型进行柔性化处理。将柔性体摇臂的Marker点与刚性体关联。采用Adams的Vibration模块进行模态仿真分析,可直接读取仿真模态频率结果。
2 结果与讨论
2.1 摩擦力矩、刚度对系统模态特性的影响
由图1动力学模型简图可知,舵轴一端的刚度对传动机构一阶弯曲模态影响较大,舵轴与本体间的摩擦力矩对传动机构的二阶扭转模态的影响较大。
2.1.1摩擦力矩对舵机传动机构模态特性的影响
通过设置摩擦力矩参数和调整摩擦力预载荷值调整舵机与本体摩擦力矩值。运动输入电机齿轮角位移设定0.05 rad/s角频率的正弦信号,舵轴与本体摩擦力矩变化曲线图如图7所示,由图7可知,一个工作周期内摩擦力矩随舵轴偏转位置而变化。
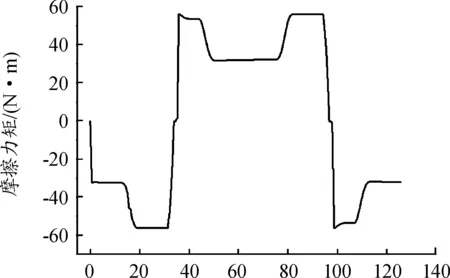
图7 摩擦力矩变化曲线
轴承刚度K41=1×107N/m、K42=1×108N/m时,改变摩擦力矩舵机传动机构前两阶模态影响变化曲线如图8所示。由图8曲线变化趋势可知,增大摩擦力矩可提高舵机传动机构的弯曲和扭转刚度,进而提高了一、二阶模态频率。随着摩擦力矩的增大,二阶模态频率近似线性增大。当摩擦力矩Tf>38 N·m时,一阶模态曲线逐渐趋180 Hz临界值,摩擦力矩的变化对一阶模态的影响在减小;摩擦力矩Tf<38 N·m 时,摩擦力矩的变化对一阶模态的影响较大。
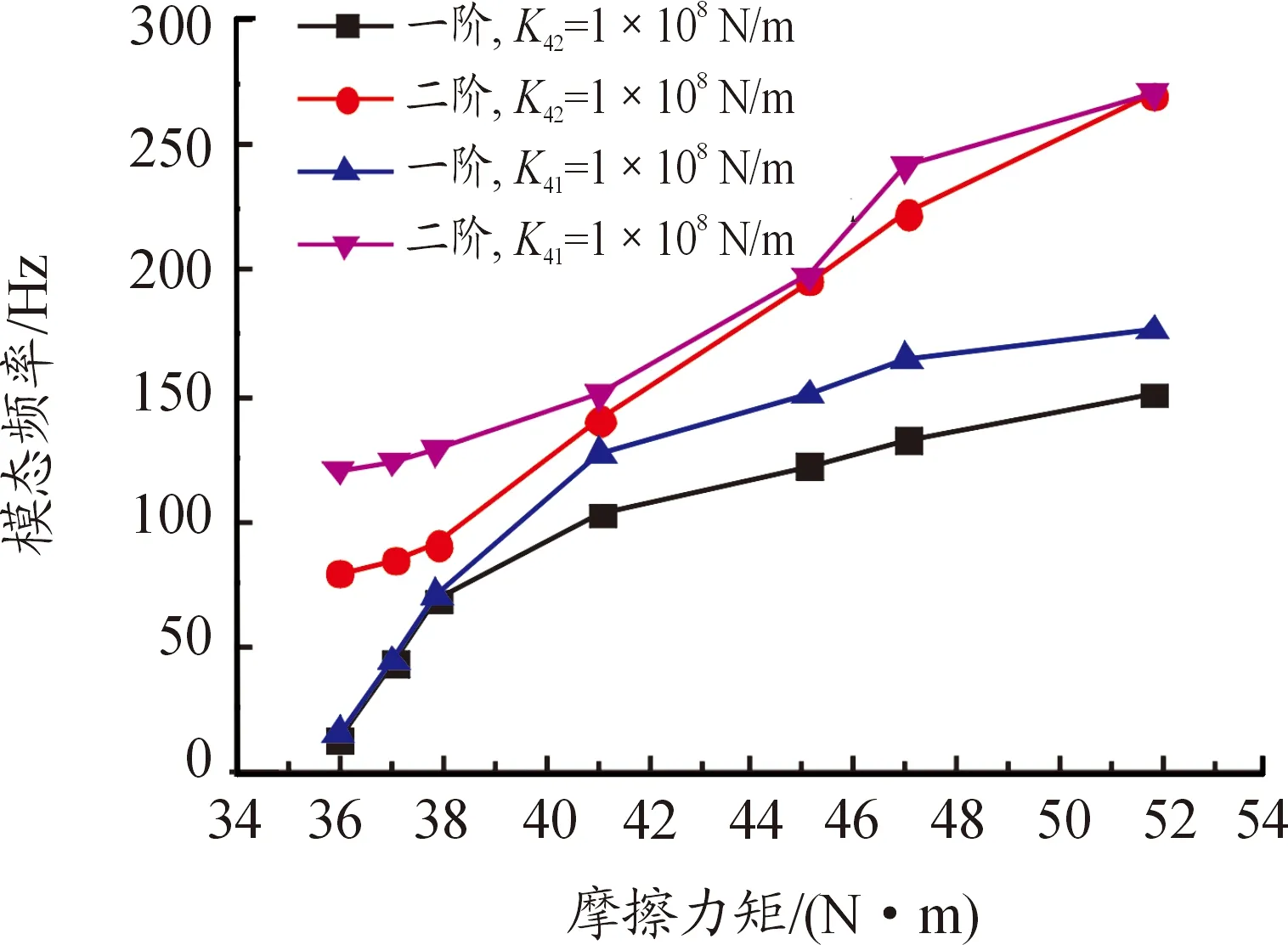
图8 模态与摩擦力矩变化曲线
由于球铰副具有两个转动自由度,摩擦力矩对舵面弯曲振动和扭转振动均有影响。轴承刚度一定的条件下,摩擦力矩Tf<38 N·m时,摩擦力矩对舵面弯曲刚度的影响起主导作用,一阶模态频率随摩擦力矩的增加其增大趋势更为明显;摩擦力矩Tf>38 N·m时,轴承刚度对舵面弯曲刚度的影响起主导作用,因此,增大摩擦力矩舵系统一阶模态频率曲线变化平缓。摩擦力矩对于舵面扭转刚度的影响起主导作用,因此,增大摩擦力矩,二阶模态逐渐增大。
2.1.2刚度对舵机传动机构模态特性的影响
摩擦力矩为Tf1=37.85 N·m、Tf2=45.10 N·m时,改变舵轴一端轴承刚度K4,轴承刚度变化对舵机传动机构一、二阶模态影响变化曲线如图9所示。Tf1=37.85 N·m时,轴承刚度K4>4×106N/m时,增大轴承刚度,一阶模态频率基本不变。Tf2=45.10 N·m时,轴承刚度K4>2×107N/m时,增大轴承刚度,一阶模态频率基本不变。因此,舵机传动机构一阶模态受到轴承刚度和摩擦力矩的双重影响,提高舵机传动机构的舵面弯曲刚度增大一阶模态频率,既要提高轴承刚度,又要提高扭转摩擦力矩。

图9 模态与轴承刚度变化曲线
不同摩擦力矩,增大轴承刚度均可提高舵机传动机构的扭转刚度,提高二阶模态频率。同时,小摩擦力矩条件下,轴承刚度较小时,改变刚度值对二阶模态的影响较小。增大摩擦力矩,可同时通过增大轴承刚度提高舵系统一阶弯曲刚度。
2.2 结构弹性变形对系统模态特性的影响
对摇臂进行柔性化处理,选择两种材料(不锈钢、铝合金),对比摇臂的柔性变形、材料对舵机传动机构模态的影响。柔性变形及不同材料条件下传动机构前三阶模态如表2所示。
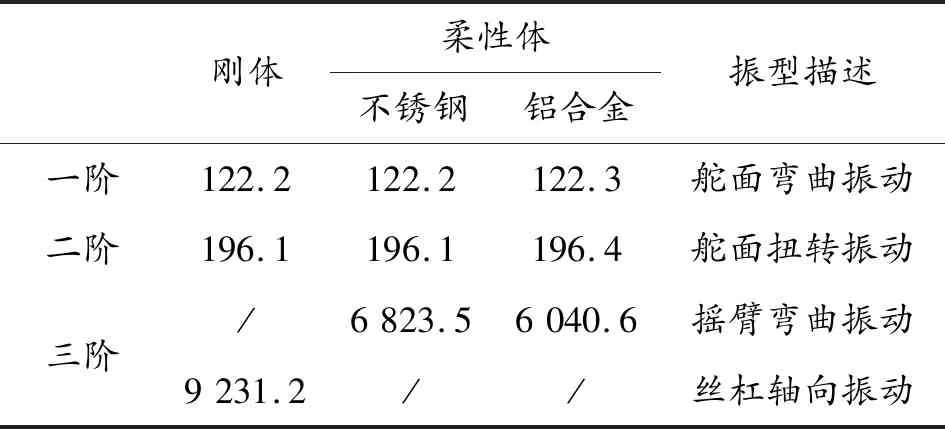
表2 考虑柔性变形及材料的传动机构前三阶模态
由表2可知,考虑摇臂的弹性变形对舵机传动机构前两阶模态数值及振型的影响较小,对三阶模态与振动的影响较大。由3.1节分析可知,舵机传动机构的一、二阶模态主要受摩擦力矩和轴承刚度的影响,因此,考虑摇臂弹性变形及更换材料对舵机传动构一、二阶模态的影响较小。零部件的弹性变形会降低传动机构的刚度,因此,零部件刚度越小,传动机构三阶模态频率越小。并且零部件的弹性变形亦会改变传动机构振型,刚体模型的三阶振型为丝杠轴向振动,柔性体模型的三阶振型为摇臂弯曲振动。因此,提高舵机传动机构末级零部件的刚度对提高传动机构模态频率作用更有效。
3 结论
1) 轴承刚度一定时,提高作用于球铰副间的摩擦力矩可提高舵系统一、二阶模态频率,增强舵系统舵面的弯曲和扭转刚度。摩擦力矩Tf<38 N·m时,摩擦力矩对舵面弯曲刚度的影响起主导作用;摩擦力矩Tf>38 N·m时,轴承刚度对舵面弯曲刚度的影响起主导作用,增大摩擦力对增大一阶模态频率增加的幅度减小。
2) 摩擦力矩一定时,增在轴承刚度可使舵系统二阶模态频率逐渐增大。大摩擦力矩条件下,轴承刚度较小时,改变刚度值对二阶模态的影响较小。随着轴承刚度的增大,Tf1=37.85 N·m,K4超过4×106N/m时,一阶模态频率基本不变;Tf2=45.10 N·m,轴承刚度K4超过2×107N/m时,一阶模态频率基本不变。增大摩擦力矩,可同时通过增大轴承刚度提高舵系统一阶弯曲刚度。
3) 改变摇臂由刚体模型为柔性刚体对舵系统的一、二阶模态的影响较小。摇臂的弹性变形可降低舵系统的三阶模态,变形量越大,三阶模态频率越小;同时,舵系统三阶振型亦发生相应的改变。
