大气湍流对半主动激光制导中光斑检测精度的影响
2021-04-08李海廷胡鑫曾双李少波周国家高志峰
李海廷, 胡鑫, 曾双, 李少波, 周国家, 高志峰
(西南技术物理研究所, 四川 成都 610041)
0 引言
半主动激光制导武器作为激光技术的一个重要应用领域,由于其具有制导精度高、抗干扰能力强、结构简单、成本低、通用性强等优势,一直在局部战争中占据重要地位,从20世纪60年代开始就得到了广泛的应用。
由半主动激光制导武器系统的工作原理可知,系统中的激光照射器独立于导弹之外,可由单兵地面手持照射目标,也可由机载照射吊舱由空中照射目标。照射器照射到目标的激光束在大气中传输不可避免地会受到大气湍流效应的影响, 大气湍流对激光传输的影响主要表现在光强闪烁、光束漂移、到达角起伏以及光束扩展等4个方面。其中:光强闪烁是指大气湍流造成的探测器上接收到激光的强度随机起伏;光束漂移和到达角起伏是指在湍流影响下照射到目标上的光斑中心位置发生随机抖动的现象;光束扩展是指受湍流的影响,照射到目标上的光斑几何尺寸会有所增大。在上述几种效应的综合作用下,实际照射到目标上的光斑会产生畸变,并在中心位置附近区域内随机抖动,最终导致接收端解算出的光轴在俯仰、偏航两个方向上与目标的偏差角发生随机变化,从而降低激光制导武器的制导精度。所以研究大气湍流对半主动激光制导技术中光斑检测精度的影响非常必要。目前可查阅到的论述大气湍流对激光束传输影响的文献大部分是以激光通信技术为应用背景[1-2],专门研究大气湍流对半主动激光制导精度影响的文献较少,而且对该问题的研究大部分都停留在理论分析、数值计算、仿真和实验室测试[3],很少看到关于大气湍流对半主动激光制导精度影响机理的论述,以及针对实际的激光制导产品进行的实验研究内容。本文旨在研究大气湍流对半主动激光制导精度影响机理的基础上,进行实验测试和数据分析,以期为提高激光制导精度的研究提供理论依据和数据支撑。
1 半主动激光制导武器系统组成和工作原理
半主动激光制导武器工作原理如图1所示。激光制导导引头大都采用四象限激光探测器进行探测,在导引头搜索、跟踪目标过程中,接收激光照射器照射到目标上的漫反射回波,经光学系统会聚在四象限探测器光敏面上,形成光斑,如图2所示。通过计算四象限探测器上光斑重心的位置,得到光轴在俯仰、偏航两个方向上与目标的夹角,并发送给综合控制器,形成制导回路。

图1 半主动激光制导武器系统的工作原理示意图Fig.1 Schematic diagram of semi-active laser guided weapon system

图2 激光制导基本原理示意图Fig.2 Schematic diagram of basic principle of laser guidance
假设UA、UB、UC和UD分别为入射光斑在激光探测器A、B、C、D等4个象限产生的光电压,则导引头在俯仰和偏航方向相对光轴的偏差可由(1)式和(2)式计算得到。
(1)
(2)
2 大气湍流对激光束传输特性影响的理论分析
大气湍流对激光信号传输产生的影响是由于大气对光束传输的折射率随着空间和时间的不同而随机变化。大气中的折射率变化主要取决于温度。地球表面及其上空大气的热量来源于太阳光的照射,地面附近的空气因受热上升和位于高空的冷空气二者相遇产生温度的随机变化(点对点),这种随机变化导致了空气中大气湍流的产生[1]。
在描述光波在大气中的传输特性时,常常用到描述大气湍流特性的物理量——大气湍流折射率结构函数Dn,考虑各向同性的湍流介质,Dn定义[1-2]为
Dn(r)=〈[n(r2)-n(r2)]2〉,Li≪r≪Lo,
(3)
式中:n(r1)、n(r2)分别为空间中r1、r2两点的折射率;r为两点间距离,即r=|r1-r2|;Li和Lo分别为湍流内、外尺度;〈〉表示系综平均。为了充分具体地描述大气湍流的物理特征和规律,提出了大气折射率功率谱Φn(k)(k为空间频率),它与折射率结构函数Dn(r)为傅里叶变换关系,最常用的湍流谱模型为Kolmogorov谱模型(见(4)式)和Von Karman谱(见(5)式)模型[3]如下:
(4)
(5)

表征大气湍流强度的另一个物理量为大气相干长度RF(也被称作Fried参数),是反映大气湍流强度的一个特征尺度,定义为激光在湍流大气中传输到距离发射端z处时,光束横截面上的外差距离,RF越小表示湍流强度越强,光波波前畸变越严重。根据Kolmogorov湍流理论,大气相干长度与折射率结构常数的空间分布之间关系[3-4]为
(6)
式中:N为波数,N=2π/λ,λ为光波波长;L为光传输的距离。
由前面分析可知,当激光束在湍流大气中传输时,湍流大气中折射率的随机起伏致使光束的偏振态、振幅以及相位也发生随机波动,从而引起到光强闪烁、光束漂移、到达角起伏和光束扩展等大气湍流效应。这些因素势必会造成激光制导导弹(或者炸弹)接收光斑发生随机抖动和畸变,从而导致制导精度的下降。
3 大气湍流对激光制导精度影响的理论分析
3.1 光强闪烁
光强闪烁现象也称大气闪烁,是指激光信号在湍流大气中传播时,当其直径dl较大而湍流尺寸l较小,即dl≫l,在光束截面内将会出现许多微小的湍流漩涡,它们的作用是对直射于其上的光束进行独立的散射和衍射,从而导致光束强度和相位随时间和空间随机变化,其是最常见、也是对激光信号影响最严重的湍流现象。
若湍流为弱湍流起伏时,湍流近似符合对数正态分布,其概率密度函数[3-4]可表达为
(7)
式中:I为光强度;σ为对数强度起伏方差,对于水平穿过大气湍流的光场而言,平面波的对数强度方差可以写为
(8)
h是波尔兹曼常数,h=1.38×10-23。则光强起伏的强度方差可以写做
(9)
式中:I0表示无大气湍流时自由空间传输中的光强度。
四象限探测器在工作过程中,暗电流、背景光、散粒噪声和电噪声等因素,都会对光斑坐标解算结果产生较大的影响。由第1节光斑检测基本原理可知,在利用(1)式和(2)式解算光斑坐标时,UA、UB、UC和UD一般取探测器A、B、C、D等4个象限输出的脉冲信号幅度的最大值Umax,如图3所示,探测器输出的激光脉冲信号上叠加了各种噪声,致使波形失真,所以实际采集的脉冲信号峰值中包含了噪声电压成分。当系统信噪比较低时,噪声叠加在激光脉冲信号上所占比重较大,对由(1)式和(2)式解算出的光斑位置数据有较大影响;而当系统信噪比较高时,噪声叠加在激光脉冲信号上所占比重较小,对由(1)式和(2)式解算的光斑坐标影响较小;当噪声信号过大时,有用信号甚至会被完全淹没,造成探测失效。

图3 探测器输出的激光脉冲波形图示意图Fig.3 Schematic diagram of laser pulse waveform outputted by detector
由上一段分析可知,提高系统信噪比对于提高光斑位置检测精度起到关键作用。假设采用直径为10 mm的PIN单四象限探测器,光斑直径D=5 mm,光斑位于光敏面正中心,光斑位置标准差随信噪比变化的仿真曲线如图4所示。当SNR小于5时,曲线急剧下降,此时的光斑检测精度较低。因此当系统信噪比变化时,光斑位置检测精度会受到较大影响。

图4 不同信噪比下光斑位置标准差仿真曲线Fig.4 Simulation curve of standard deviation of spot position under different SNRs
在激光制导武器系统中,由于大气湍流效应作用于照射光束而引起的光强闪烁,使得接收端激光探测器在固定位置接收到的激光回波强度不再是一个恒定值,而是在一定范围内随机起伏,从而其输出的响应电压也随机波动,其效果等效于激光探测器接收系统的信噪比随机波动,最终结果表现为探测器光斑位置检测精度随系统信噪比的波动而随机波动,即会导致制导精度的下降。
3.2 光束漂移和到达角起伏
光束漂移是指当光束直径较小而湍流尺寸较大,即dl≪l时,大气湍流会使得光路出现随机偏折,进而引起光束的随机起伏,导致光束不再按原来的路径进行传播的现象。在平面波中传输时,光束漂移的程度可用(10)式[5-6]来描述:
(10)

(11)

光束漂移和到达角起伏,会使得激光束照射到目标上的光斑中心位置围绕瞄准点在特定平面区域范围内随机跳动,即引起光斑漂移,如图5所示。

图5 照射光斑漂移示意图Fig.5 Schematic diagram of illumination spot drift
在导引头跟踪目标过程中,由于照射到目标上的光斑位置和光束到达角发生随机变化,导引头光学系统接收的漫反射光的入射方向随之变化。如图6所示,当入射光从Z轴方向入射后,在焦距为f′的光学系统会聚下,在光敏面上形成的聚焦光斑如图6中黄色部分所示,其中光斑中心为O′,光敏面的中心为O. 假设入射光束发生偏移,相对于Z轴产生了一个夹角Δβ,ΔβX为激光束在OXZ平面的角度分量,ΔβY为激光束在OYZ平面的角度分量。这时由(1)式和(2)式计算出的光斑质心位置坐标就会分别在X轴和Y轴方向产生一个偏移量ΔX和ΔY,测试ΔX、ΔY、Δβ、ΔβX和ΔβY之间存在以下换算关系:
(12)
(13)
(14)

图6 光束偏转角度与偏移量的关系图Fig.6 Relational chart of deflection angle and offset of light beam
对于稳定平台激光导引头,为了实现稳定跟踪,伺服平台需要根据计算得到的偏差角ΔβX和ΔβY的值,相应地产生一个控制量驱动伺服平台运动,从而实现闭环控制。但是这个平台运动不是由于真正的目标移动引起的,而是由于照射光束漂移和到达角起伏引起的。对于伺服平台而言,偏差角ΔβX和ΔβY就是噪声输入,而该噪声会降低导引头的制导精度。
3.3 光束扩展
光束扩展是指从发射端发出的光束,经湍流信道传输后,实际照射到目标上的光束直径大于原始直径的现象。对于高斯光束而言,照射到目标上的光束直径[5]应为
DT=D0(1+1.33Σ2Λ5/6)1/2,
(15)
在强湍流区,该直径为
DT=D0(1+1.63Σ2Λ5/6)1/2,
(16)
式中:D0为光束在真空中传播时接收平面上的光束直径;Σ为光斑形状参数;Λ为高斯光束参数。
在激光制导武器系统中,光束扩展会使得激光束照射到目标上的光斑直径变大,如图7所示。
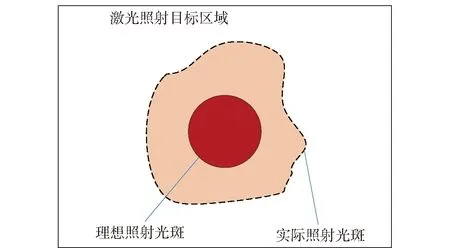
图7 光束扩散导致的激光照射光斑增大效果示意图Fig.7 Schematic diagram of laser spot enlargement caused by beam diffusion
结合导引头光学系统进行分析,根据圆型光瞳的理想衍射成像的光强分布归一化高斯函数得到等效高斯宽度W[9]为
W=0.431λF,
(17)
对于本文研究的激光制导:λ为1 064 nm;F=f′/d,d为物镜有效通光口径。当大气湍流导致照射光束扩展时,照射到目标上的光斑尺寸将增大,如果相干长度为RF,则光斑的高斯宽度W[9]为
W=0.431λF(1+(d/RF)2(1-0.37(RF/d)1/3)1/2.
(18)
由(18)式可见,光斑检测精度与高斯宽度有直接关系,当大气湍流导致光束扩展时,高斯宽度增大,接收光斑也随之增大,从而导致光斑位置检测精度下降[10-12]。
3.4 光斑畸变
以上3.1~3.3节分别对光强闪烁,光束漂移和到达角起伏以及光束扩展因素对激光制导精度的影响作了理论分析,而激光制导武器系统实际作战环境中,随着大气温度、密度、压强和流速等不同气象因素的随机变化,3.1~3.3节中每一种因素的影响程度会有差异,而这种差异是随机性的。实际照射到目标上的光斑会在这些因素综合作用下产生畸变[13],如图8所示,畸变程度无法定量描述和计算,只能通过实验方式探索其对制导精度的影响程度[14]。

图8 照射光斑畸变示意图Fig.8 Schematic diagram of illumination spot distortion
4 大气折射率常数测试方法
由第3节的分析可知,根据Tatarski理论,在中等或弱湍流条件下,到达角起伏方差的表达式[15]为
(19)

(20)

5 大气湍流对激光制导精度影响的实验研究
5.1 接收机技术指标
为了通过实验研究大气湍流对激光制导位置检测精度的影响,采用一个稳定平台式激光半主动导引头进行实验测试。该导引头采用两轴伺服稳定平台,激光探测器采用某公司生产的光敏面直径为10 mm的PIN单四象限探测器。在实验中,利用该导引头接收漫反射激光回波,经过信息处理后通过RS422串口实时输出激光光斑位置坐标数据,其主要技术指标如下:
1) 工作波段:1 064 nm;
2) 接收光学口径:60 mm;
3) 视场范围:±8°;
4) 线性区:±4°.
由于在本文进行的实验研究中,接收距离为2 km,故在光学设计软件CODE V上对光学系统的点列图进行仿真,2 km物距时的仿真结果如图9所示。
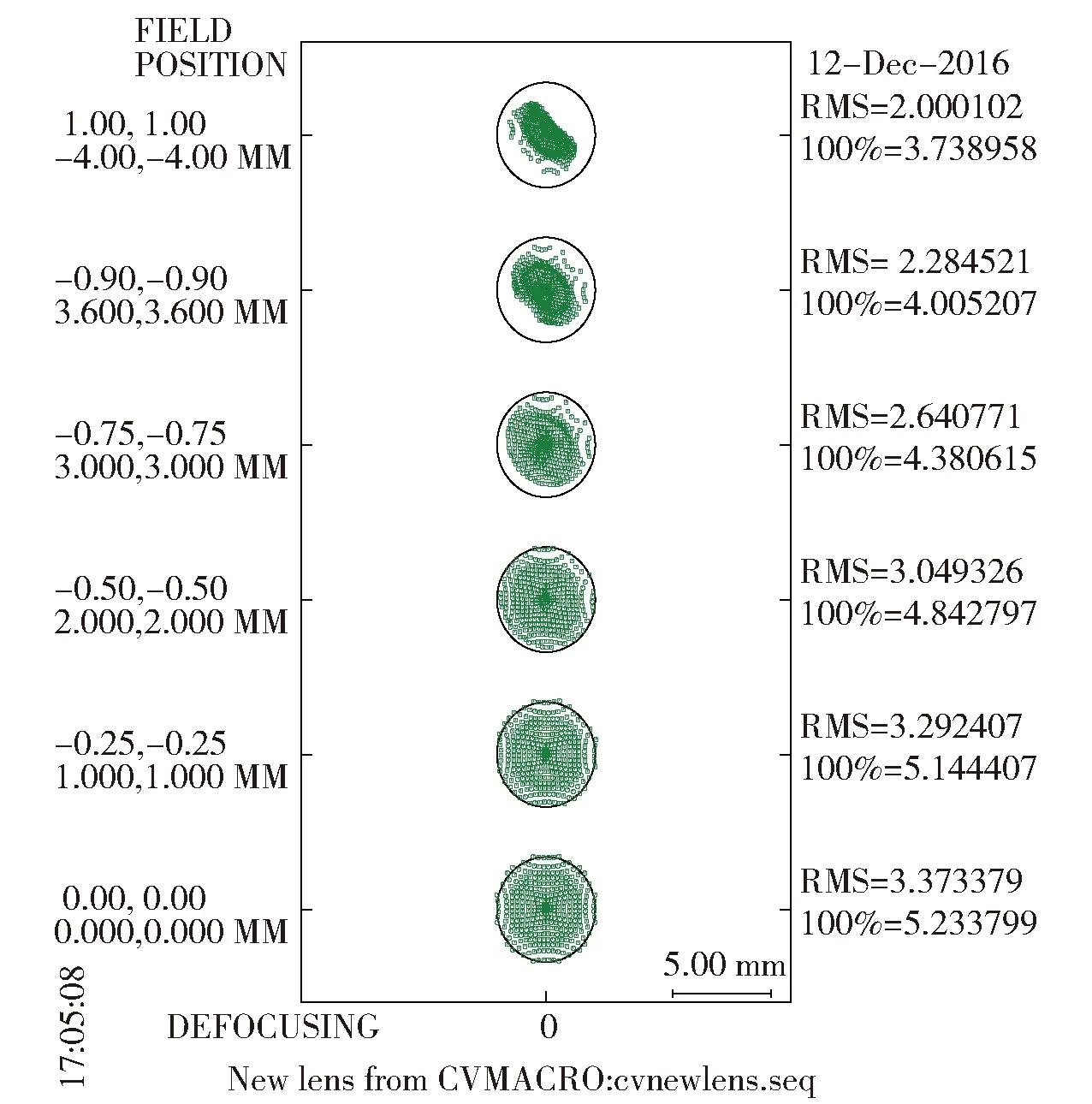
图9 物距为2 km时的点列图Fig.9 Point-by-point diagram with object distance of 2 km
5.2 实验条件描述

目前半主动激光制导武器系统,在实际使用时综合考虑照射精度、照射瞄准难度和操作人员安全等因素,照射距离一般选定在1~4 km范围内。考虑到绝大部分激光制导导弹和炸弹,在实际使用时都是在弹目距(导弹距离目标的距离)小于4 km时开始利用导引头输出的制导信号进行闭环控制,实验中将导引头放置在距离靶标2 km处接收漫反射激光回波,实时输出激光光斑位置坐标数据。为了从接收方向真实地记录靶标上照射光斑的信息,在靠近导引头的位置放置一台互补金属氧化物半导体(CMOS)摄像机,用于拍摄和存储靶标上的激光照射光斑图像信息。为了对靶标上照射激光光斑成像,摄像机光学镜头中增加了中心波长为1 064 nm、半带宽为50 nm的窄带滤光片。摄像机的帧频为50 Hz,分辨率为1 024×1 024像素。
实验场景布置如图10所示,激光照射器分别布置在距离靶标1 km和4 km的位置,激光导引头放置在距离靶标2 km处接收激光回波,激光发射和接收方向的夹角约为20°.
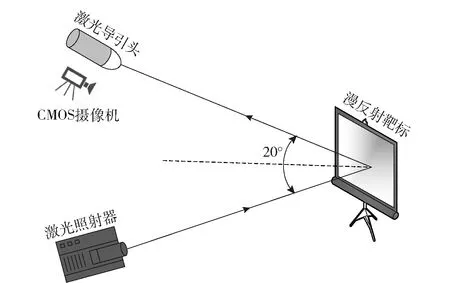
图10 外场实验场地布局示意图Fig.10 Schematic layout of field experimental site
实验所选用的激光照射器主要技术指标:
1) 激光波长:1 064 nm;
2) 脉冲宽度:20ns±5ns;
3) 输出能量:60 mJ;
4) 束散角:0.3 mrad;
5) 激光编码:50 000 μs±2.5 μs固定频率。
实验所选用的靶标采用反射率为0.2的标准漫反射靶标,靶面尺寸为4 m×3 m,实物照片如图11所示。

图11 靶标实物架设照片Fig.11 Photo of physical erection of a target
5.3 较好天气条件下的光斑检测精度测试
为了测试在弱大气湍流下的激光导引头光斑检测精度,选择天气情况相对较好的2020年1月8日,时间段为12:00~14:00时。天气条件为:晴转多云,气温-5 ℃~-13 ℃,空气湿度17%,西北风2~3级,能见度10 km.
摄像机采集的靶标上激光光斑图像如图12所示。后期对图像数据进行处理,通过计算得到光斑图像中心的位置信息,从而能够计算出接收光斑的到达角起伏方差。

图12 不同照射距离时的光斑图像Fig.12 Spot images at different irradiation distances

图13 照射距离为1 km时的光斑位置坐标数据Fig.13 Spot position coordinates at 1 km

图14 照射距离为1 km时光斑位置数据统计直方图Fig.14 Statistical histogram of spot location data at 1 km

图15 照射距离为4 km时的光斑位置坐标数据Fig.15 Spot position coordinates at 4 km
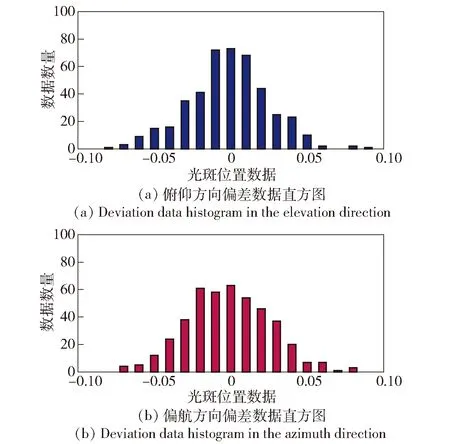
图16 照射距离为4 km时的光斑位置数据统计直方图Fig.16 Statistical histogram of spot location data at 4 km
5.4 较差天气条件下的光斑检测精度测试
为了测试在较强大气湍流下的激光导引头光斑检测精度,选择天气情况相对较为恶劣的2020年1月11日,测试时间段为12:00~14:00。天气条件为:多云转阴,气温-8~-15 ℃,空气湿度21%,西南风5~6级,能见度8 km,地面有雾气。
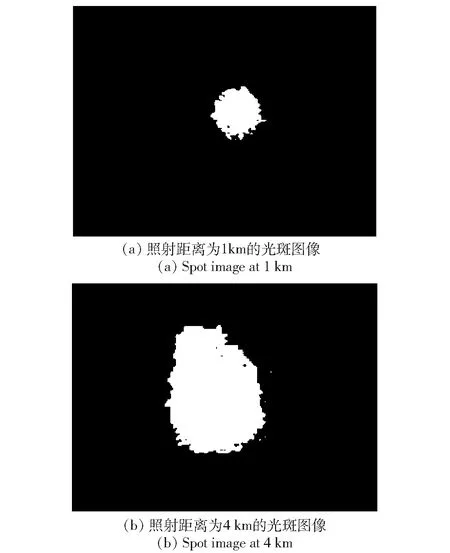
图17 不同照射距离时的光斑图像Fig.17 Spot images at different irradiation distances
图18和图20为照射距离分别是1 km和4 km时导引头输出的俯仰和偏航方向的偏差值数据。图19和图21为照射距离分别是1 km和4 km时俯仰和偏航方向偏差值数据直方图统计柱状图,从中可以看出偏差数据近似服从正态分布。

图19 照射距离为1 km时光斑位置数据统计直方图Fig.19 Statistical histogram of spot location data at 1 km
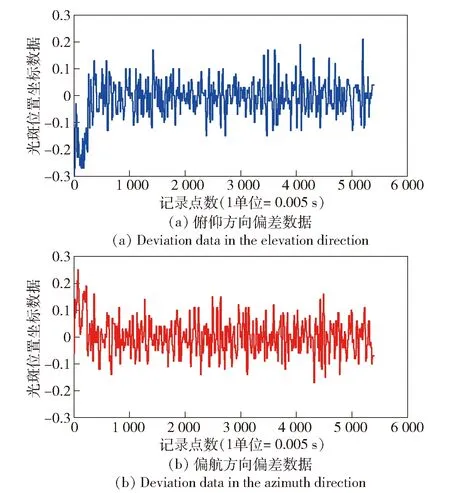
图20 照射距离为4 km时的光斑位置坐标数据Fig.20 Spot position coordinates at 4 km
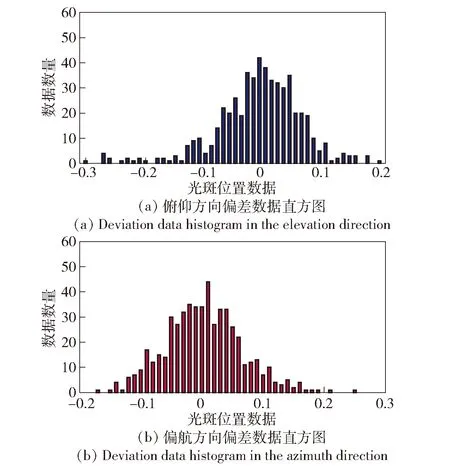
图21 照射距离为4 km时光斑位置数据统计直方图Fig.21 Statistical histogram of spot location data at 4 km
5.5 实验数据分析
由图11和图16可知,大气湍流越强,照射到目标上的光斑畸变越严重,光斑几何尺寸也越大。在照射距离为1 km时,图12(a)和图17(a)中的光斑图像差异并不明显,但是在照射距离为4 km时,图17(b)中的光斑图像相比图12(b),光斑畸变更为显著。
由图12和图17可知,大气湍流越强,照射到目标上的光斑畸变越严重,特别是在1月11日进行的实验,由于地面积雪融化蒸发后产生的水蒸气与沙尘混合形成的气溶胶,对激光衰减和散射更为严重,在风吹动下产生的大气湍流效应对激光束传输产生的不利影响也更为严重。

表1 1月8日照射距离为1 km和4 km时的和光斑位置数据标准偏差
表2 1月11日照射距离为1 km和4 km时的和光斑位置数据标准偏差
由5.3节和5.4节中的实验数据可以得出结论,大气折射率常数不仅与天气条件有关,还与照射距离有关,而大气折射率常数越大,光斑检测精度越差,也证明了第4节提出的大气折射率常数测试方法的有效性。
以上实验数据无法用第3节中的单一数学模型描述,因为这些数据是由光强闪烁、光束漂移、到达角起伏以及光束扩展等效应综合作用的结果。实验数据充分展现了在大气湍流作用下激光光斑检测数据的统计分布特征。
6 结论
本文在接近实弹应用的条件下对大气湍流对激光制导精度的影响进行研究。弱大气湍流条件下:照射距离为1 km时, 大气折射率常数为1.371×10-15,光斑位置数据的标准方差为0.011;照射距离为4 km时,大气折射率为3.183×10-15,光斑位置数据的标准方差为0.023. 在强大气湍流条件下:照射距离为1 km时,大气折射率常数为1.162×10-14,光斑位置数据的标准方差为0.031;照射距离为4 km时,计算得到的大气折射率常数为2.041×10-14,光斑位置数据的标准方差为0.043. 通过分析实验数据得出结论,大气折射率常数不仅与天气条件有关,还与照射距离有关,并且大气折射率常数越大,光斑检测精度越差。本文不仅为提高激光制导精度的研究提供了理论依据和数据支撑,还对半主动激光制导武器系统的作战使用具有指导意义。
参考文献(References)
[1] 白芳.湍流对激光啁啾调幅外差探测系统的影响[D].西安:西安电子科技大学,2018:10-11.
BAI F. The influence of turbulence on the heterodyne detection system of laser chirp amplitude modulation [D].Xi’an:Xidian University,2018: 10-11.(in Chinese)
[2] 哈密德·何马提.近地激光通信[M].佟首峰,刘云清,娄岩,译.北京:国防工业出版社,2017:198-220.
HAMID H. Near-earth laser communications[M].TONG S F,LIU Y Q,LOU Y,translated. Beijing:National Defense Industry Press,2017:198-220. (in Chinese)
[3] 叶顺流,朱少岚,孙启兵,等.大气湍流对激光半主动制导精度的影响[J]. 激光与红外,2010,40(6):628-631.
YE S L,ZHU S L,SUN Q B,et al.Influence of atmospheric turbulence on the accuracy of semi-active laser guidance[J].Laser and Infrared, 2010,40(6):628-631 .(in Chinese)
[4] 赵馨,佟首峰.大气湍流对象限探测器光斑检测的影响[J].红外与激光工程,2010,39(6):1147-1151.
ZHAO X,TONG S F.Atmospheric turbulence effect on detecting spot of four-quadrant detector[J]. Infrared and Laser Engineering,2010,39(6):1147-1151. (in Chinese)
[5] 宋梨花.大气激光通信中的光空间调制[D].兰州:兰州理工大学, 2019:13-14.
SONG L H.Optical spatial modulation for atmosphere laser communication[D]. Lanzhou:Lanzhou University of Technology, 2019:13-14.(in Chinese)
[6] 王奇涛,佟首峰,徐友会.采用Zernike多项式对大气湍流相位屏的仿真和验证[J].红外与激光工程, 2013,42(7):1907-1911.
WANG Q T,TONG S F,XU Y H.Simulation and verification of atmospheric turbulent phase screen using Zernike polynomials[J].Infrared and Laser Engineering, 2013,42(7):1907-1911. (in Chinese)
[7] 曹国华,徐洪, 苏成志.大气湍流对激光校准轴系的影响[J].兵工学报,2005,26(3):327-329
CAO G H,XU H,SU C Z.Effects of atmospheric turbulence on the laser alignment of a shaft[J].Acta Armamentarii,2005,26(3):327-329.(in Chinese)
[8] 邢建斌,许国良,旭苹,等.大气湍流对激光通信系统的影响[J].光子学报,2005,34(12):1850-1852.
XING J B,XU G L,XU P,et al. Effect of the atmospheric turbulence on laser communication system[J]. Acta Photonica Sinica, 2005,34(12):1850-1852. (in Chinese)
[9] 范新坤.空间激光通信系统中激光光斑精密判读技术[D].长春:长春理工大学,2018:15-16.
FAN X K.The precision detection technology of laser spot in space laser communication system[D]. Changchun:Changchun University of Science and Technology,2018: 15-16.(in Chinese)
[10] 张雷,张国玉,刘云清.影响四象限探测器探测精度的因素[J].中国激光,2012,39(6):121-125.
ZHANG L, ZHANG G Y,LIU Y Q.Affecting factor for detection accuracy of four-quadrant detector[J].Chinese Journal of Lasers, 2012,39(6):121-125. (in Chinese)
[11] ZHANG W, ZHANG H,ZHANG X J,et al. Laser pulse peak estimation based on photon capture mode of quadrant photodetector [J]. Optik,2016,127(22) :10808-10815.
[12] JOSEF Z,FELIX S,JOHANNES W,et al.On detector linearity and precision of beam shift detection for quantitative differential phase contrast applications[J]. Ultramicroscopy,2016,168:53-64.
[13] VO Q S, ZHANG X D, FANG F Z. Extended the linear mea-surement range of four-quadrant detector by using modified polyno-mial fitting algorithm in micro-displacement measuring system[J]. Optics and Laser Technology, 2019,112: 332-338.
[14] FERRARO M S,RABINOVICH W S,CLARK W R,et al.Impact ionization engineered avalanche photodiode arrays for free-space optical communication[J].Optical Engineering,2016,55(11):111609.
[15] 李学良.大气激光通信数字相干探测关键技术研究[D].长春:中国科学院大学, 2018:105-114.
LI X L.Reseaches on several key technologies for free space optical communication based on digital coherent detection[D]. Changchun:University of Chinese Academy of Sciences, 2018:105-114.(in Chinese)
