桉树爬树修枝机的设计与测试
2021-03-31郑贤邓毅李岩舟朱欣民
郑贤,邓毅,李岩舟,朱欣民
(1.广西大学机械工程学院,南宁 530004;2.广西制造系统与先进制造技术重点实验室,南宁 530004;3.广西田园生化股份有限公司,南宁 530007;4.中国矿业大学力学与土木工程学院,江苏 徐州 221116)
近年来,随着桉树由纸质用材向锯材用材的转变,木材市场对桉树木材品质的要求越来越高,无节眼、通直度高的桉树木材的售价往往比普通的高,而在林木的生产过程中,对林木进行适时的修枝是获得无节眼、通直度高的优质木材的有效手段,也是增加林木产量的主要方法之一[1]。桉树种植大户大都希望通过修枝来提高桉树的林木品质和产量,获得更大的经济价值,但是当前的桉树修枝主要以人工为主,工作繁重且效率不高。目前有关小型专用修枝机的研发,国内有北京林业大学通过引进国外技术研发的沿着树干螺旋爬升修枝机器[2-3]、东北林业大学设计的基于模糊控制的剪枝机器人[4]、山东农业大学设计的螺旋爬升式修枝机器和直接爬升式修枝机器[5]、南京林业大学设计的基于柔性刀具的爬树修枝机器人[6]以及金华绿川科技有限公司设计的爬树修枝机器人[7]等;国外有日本SEIREI公司设计的无线可遥控型自动立木整枝机(AB170、AB230、AB350系列)[8]、Gui等[9]设计的带有防下滑功能新型修枝机器人、日本岐阜大学持续10多年研发的带有节能链锯驱动器的修枝机器人[10]和德国Jordan家族企业研发的advaligno PATAS[11-12]等。从以上研究可以看出,国内研发的机型尚处于测试试验阶段,较少有可应用的机型;国外方面不少机型能够较好地完成修枝作业,但并不能较好地适用于桉树的修枝。这主要是因为桉树的种植密度高且种植地主要分布在地貌为丘陵、路况复杂的广西、广东和海南等省区,能够适应作业环境的修枝机必须同时具备快速修枝和结构轻巧这两个基本的特点,而现有的类似无线可遥控型自动立木整枝机这一类以螺旋攀爬树干方式完成修枝作业的修枝机器[8],虽然可以切割各种不同大小的枝条,但质量较大,修枝速度也不能太高,否则受离心力的影响容易造成树干晃动;带有节能链锯驱动器的修枝机器人[10]可以切割各种不同大小的枝条,但作业速度太慢;advaligno PATAS[11-12]具有很高的工作效率,但质量较大,单切割头部分就达50 kg。以开发具有快速修枝和轻巧结构的修枝机为目标,本研究设计了一种沿着树干竖直爬升并在爬升过程中利用修枝刀片完成修枝作业的桉树爬树修枝机。该机主要由修枝装置和攀爬装置组成,其本身不带动力源而是通过电源线与动力源相连接,采用这种与动力源分开的结构设计使得桉树爬树修枝机具有轻巧的结构,质量仅为9.8 kg,并且具有较高的作业速度,最高作业速度可达2.79 m/s。物理样机试验测试表明,该机具有较好的攀爬性能,能够顺利切割直径在10 mm以内的枝条,切割直径更大的枝条则可通过进一步增加攀爬装置的夹紧力来实现。
1 桉树爬树修枝机的构造及工作原理
桉树爬树修枝机仅是一个完整的修枝机械的主要部分——作业部分,自身并不能单独工作,工作时需与控制器、电源线、移动电源和手持遥控器进行组合才能完成修枝作业,其工作示意图和结构图如图1所示。其中控制器安装在桉树爬树修机上并与移动电源通过电源线相连;移动电源为汽油机驱动且输出电压为24 V的直流电发电机;手持遥控器为操控装置,用于发送信号控制桉树爬树修枝机以完成修枝作业。桉树爬树修枝机主要由机架、修枝装置(主要包括活动刀片、固定刀片、活动刀片开合驱动机构、电动推杆)和攀爬装置(主要包括驱动电机、减速器、驱动轮、从动轮、驱动轮开合驱动机构、电动推杆)组成,其本身不配备驱动源,而采用电源线与驱动源进行相连。这种设计方式可以减轻桉树爬树修枝机的质量,使其在爬树修枝过程中获得较高的爬升速度,并且利用这种较高的爬升速度所具有的动能将枝条剪切下来。
工作时,先操纵手持遥控器使活动刀片(3)和驱动轮(1)分别在各自的电动推杆(7和9)的推动下通过开合驱动机构(8和2)同时张开;再通过人工将桉树爬树修枝机移动到树干底部使张开的活动刀片(3)和驱动轮(1)卡入树干,接着操纵手持遥控器使活动刀片(3)和驱动轮(1)同时闭合以夹紧树干;最后操纵手持遥控器使驱动轮(1)转动从而使桉树爬树修枝机沿着树干往上爬升。当桉树爬树修枝机继续爬升,直到活动刀片(2)或者定刀片(5)与树枝相遇时,桉树爬树修枝机则利用爬升过程中获得的动能将树枝从树干上剪切下来从而完成修枝作业。修完树枝后,操纵手持遥控器使驱动轮反向转动使桉树爬树修枝机沿着树干下落回到地面,从而完成1株林木的修枝工作。
2 桉树爬树修枝机的结构设计
2.1 攀爬装置的设计
2.1.1 攀爬装置的结构设计
桉树作为一种速生林木,其树干的通直度通常比其他林木高。为了能够快速修枝,桉树爬树修枝机的攀爬装置采用两个対置分布的驱动轮作为攀爬驱动机构,使得修枝机可以沿着树干直接往上爬升。攀爬装置主要由左驱动轮、左轮架、左连杆、左减速器、左无刷电机、右驱动轮、右轮架、右减速器拉杆、右无刷电机、右连杆、推拉杆、电动推杆、上从动轮、下从动轮组成,如图2所示。

1.左驱动轮;2.左轮架;3.左连杆;4.右驱动轮;5.右轮架;6.右减速器;7.右无刷电机;8.右连杆;9.推拉杆;10.电动推杆;11.左无刷电机;12.左减速器。图2 攀爬装置的结构图(上、下从动轮未画出)Fig.2 Structure diagram of the climbing device(without upper driven wheel and lower driven wheel)
2.1.2 攀爬装置的受力分析
1)受力分析图。从动轮的结构尺寸和质量较小,其转动惯量忽略不计,则攀爬装置在攀爬树木的过程中,其受力分析图如图3所示。图3a中,OR和OL为固定于机架的销轴轴心;O为树干与从动轮的接触点;OR、OL、O3点保持固定不动;Q″和Q分别为树干与左、右驱动轮的接触点;O′为树干的中心;R为树干的半径;N1、N2分别为左、右驱动轮与树干的正压力,N3为树干与上下两个从动轮的正压力合力;F为电动推杆的拉力;γ为N2与桉树爬树修枝机对称线的夹角;L1为OR和OL两点之间的距离;L2为从动轮外缘到点OR的距离。图3b中,N′3和N″3分别为树干与上从动轮和下从动轮的正压力;N4为动刀片与树干的正压力;Q″为树干与左驱动轮的接触点;O1和O2分别为树干与上、下从动轮的接触点;Ff为左驱动轮和右驱动轮与树干之间的总摩擦力;m为桉树爬树修枝机的质量;g为重力加速度;a为桉树爬树修枝机的加速度;μr为从动轮与树干之间的滚动阻力系数;μ′r为驱动轮与树干之间的滚动阻力系数;μd为动刀片与树干之间的滑动摩擦系数;Q″到O1和Q″到O2的距离在竖直面上的投影同为L4;桉树爬树修枝机的重心到树干边缘的距离为L5;L6为动刀片与树干接触点到树干与上从动轮的接触点的竖直距离。图中N4和N′3不能同时存在,即当N′3为正值时,N′3充当有效力,此时N4不存在;当N′3为负值时,此时,N4充当有效力,N′3不存在。桉树爬树修枝机在正常的工作条件下,其动刀片不应该与树干存在接触力,因此,在进行力学分析时,假设N′3为正值,即N′3充当有效力,N4不存在。

图3 攀爬装置的受力分析图Fig.3 Force diagram of the climbing device
2)γ角的计算。假设树干截面为正圆,由于桉树爬树修枝机是对称的,则N2与桉树爬树修枝机对称线的夹角也等于γ。为求出γ,过点OR作一条平行于驱动轮外沿线的辅助线ORQ′与N2的作用线相交于点Q′,Q和Q′两点之间的距离为L3,以点O为原点,建立如图3a所示的坐标系,则Q′的坐标为(-R,0),QR的坐标为(L2,L1/2),由此可得:
(1)
(2)
则:
γ=180°-∠ORO′O-∠ORO′Q′=
(3)
3)水平面上的力平衡分析。以攀爬装置为对象进行力平衡分析,由∑Fy=0,得:
N2cosγ-N1cosγ=0
(4)
即:
N2=N1
(5)
以右驱动轮、右轮架、右连杆、右减速器、右无刷电机作为一个整体进行力平衡分析,由∑MOR=0,得:
(6)
式中,LORQ′为OR和Q′两点之间的距离。
由几何关系,得:
(7)
令N2=N1=N,并将式(7)代入式(6),得:
(8)
由∑Fx=0,得:
N3-2Ncosγ=0
(9)
4)竖直面上的力平衡分析。由N3为树干与上下两个从动轮的正压力合力,得:
N′3+N″3=N3
(10)
由∑MQ″=0,得:
N″3×L4-(μrN′3+μrN″3)×R(1+cosγ)-N′3×L4-(mg+ma)×[L5+R(1+cosγ)]=0
(11)
综合式(9)、式(10)和式(11),求得:
(12)
综合式(9)、式(10)和式(12),求得:
(13)
由于N′3不可能小于0,因此:
(14)
将式(8)代入式(14),得电动推杆的拉力F所要满足的条件为:
(15)
由∑Fz=0,得:
Ff-2μ′rN-μrN′3-μrN″3-mg-ma=0
(16)
将式(12)和式(13)代入式(16),求得:
Ff=2μ′rN+2μrNcosγ+mg+ma
(17)
为避免驱动轮打滑,驱动力应满足如下关系:
Ff≤2μN
(18)
式中:μ为驱动轮与树干之间的静系数。
当电动推杆的拉力F为定值时,将式(8)和式(17)代入式(18),得到驱动轮不打滑时,驱动轮与树干之间的静系数μ所要求满足的条件:
(19)
当μ为定值时,即驱动外层的材料不变时,对式(19)进行整理,得到驱动轮不打滑,电动推杆的拉力F所要求满足的条件为:
(20)
由前述可知,电动推杆的拉力还需满足式(15),因此,为了使驱动轮不打滑,电动推杆的拉力应该满足:

(21)
2.2 修枝装置的设计
2.2.1 刀片倾角的确定
修枝装置作为切割枝条的主要部分,其设计的关键在于降低切割阻力。由文献[13]可知,刀具沿不同的方向对由纤维构成的物料进行切割,其切割阻力有很大的差异,其中以滑切较为省力。修枝装置对桉树枝条的滑切是以3片刀片在其圆柱轮廓面上具有一定的倾角来实现的,如图4所示。以左动刀片切割树枝为例,当桉树爬树修枝机以速度v往上爬升时,左动刀片以速度v与树枝相遇,此速度可以分解为滑切速度v1和正切速度v2,若左动刀片在其圆柱轮廓面上具有的倾角为β,则v1=vsinβ,该倾角β越大,滑切速度v1也越大,对应的,刀片对枝条的滑切作用也越强。因此,为了降低切割阻力,设计时应使修枝装置的3片刀片在其圆柱轮廓面上具有一定的倾角。考虑到定刀片和动刀片倾角的增大会影响桉树爬树修枝机的结构布置和总体质量,在设计时取定刀片的倾角α=10°,动刀片的倾角β=12°,如图5和图6所示。
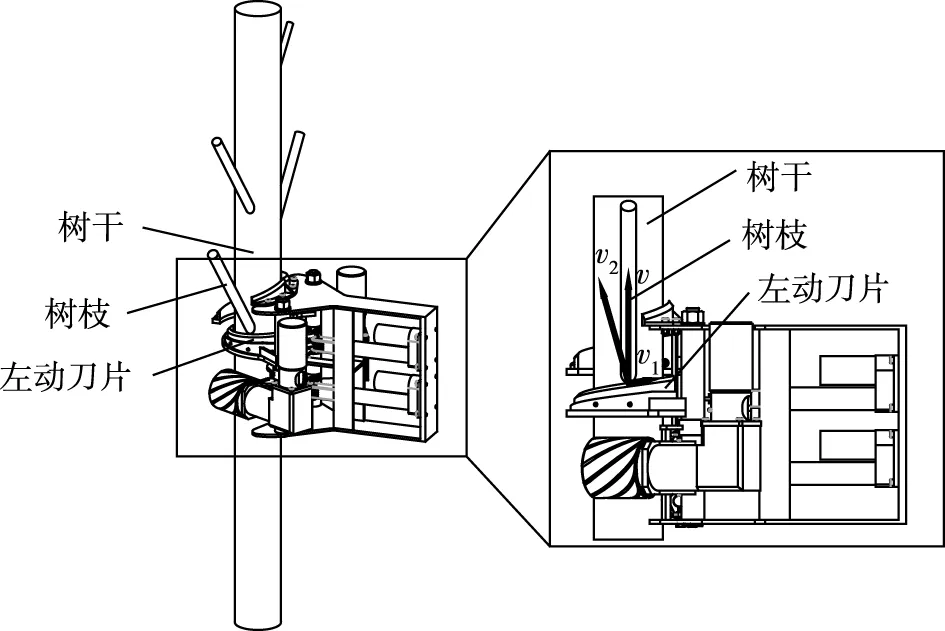
图4 修枝装置对枝条的滑切分析Fig.4 Analysis on the sliding cutting of branches by the pruning device

图5 定刀片的结构图Fig.5 Structural drawing of the fixed blade

图6 左、右动刀片的结构图Fig.6 Structural drawing of the left and right movable blades
2.2.2 修枝装置结构设计
修枝装置主要包括定刀片、左动刀片及其安装座、右动刀片及其安装座、电动推杆以及由左连杆、右连杆和推拉杆组成的开合驱动机构,如图7所示。其中,定刀片固定在机架上,左动刀片右刀片为两片对称的刀片,安装时,左、右刀片竖直方向上错开一定的距离,使得刀片很够完全合抱在树干周围,以避免出现枝条漏修的情况。修枝装置在工作时,电动推杆缩回使左、右动刀片合抱树干,当桉树爬树修枝机沿着树干往上爬升时,3片刀片的锋利刀刃借助桉树爬树修枝机的动能将树枝切割下来。

1.左动刀片;2.左连杆;3.右连杆;4.右动刀片;5.右动刀片安装座;6.推拉杆;7.电动推杆;8.左动刀片安装座。图7 修枝装置的结构图(定刀片未画出)Fig.7 Structural diagram of the pruning device(without the fixed blade)
3 修枝机的测试与结果分析
3.1 主要参数
桉树爬树修枝机的总质量m为9.8 kg;驱动轮由金属内芯和橡胶外层组成,其中橡胶外层的厚度和硬度分别为25 mm和HA45,外表面光滑,直径d为80 mm;攀爬装置的电动推杆的最大拉力F为600 N,无刷电机的型号、最大电压和最大功率分别为LBP5692-1000KV、40 V和5 500 W;减速器的减速比i为36∶1;移动电源以两个串联的12 V铅蓄电池作为替代。
3.2 攀爬性能测试
攀爬性能测试在室外进行,地点为广西南宁市广西大学校园,攀爬的对象为生长在道路两侧的树龄6~8 a的桉树活立木,树干直径为100~120 mm。测试时,首先在驱动轮外表面上做一个白色的标记点;然后在适当的拍摄位置固定摄像机并开启录像功能;接着操纵手持遥控器使桉树爬树修枝机的驱动轮转速由零开始逐渐增加至最大值(666 r/min),并观测桉树爬树修枝机的攀爬情况;最后通过摄像机拍摄的影像判断出驱动轮上白色的标记点与树干首次接触时的接触点A和转过整数倍圈数后的接触点B,并测量接触点A和接触点B之间的距离L,如图8所示。

图8 桉树爬树修枝机的攀爬性能测试Fig.8 Climbing performance test of the pruning machine for eucalyptus trees
对摄影机拍摄得到的影像进行查看,可以看出桉树爬树修枝机能够顺利沿着树干往上爬升,肉眼观察未见驱动轮有打滑的情况,树干也未见损伤,具有较好的攀爬性能。测量得到接触点A和接触点B之间距离L为678 mm,而驱动轮从接触点A转到接触点B的圈数n为3圈,由此算得驱动轮不打滑时所走过的理论距离L0为:
L0=nπd=3×3.14×80=753.6
(22)
式中,d为驱动轮直径。
桉树爬树修枝机在攀爬树干的过程中的打滑率(S)为:
(23)
由此可知,虽然肉眼观察未见驱动轮有打滑的情况,但桉树爬树修枝机在攀爬树干的过程中是存在打滑的。由计算可知,该次测试的打滑率为10.03%,但驱动轮的实际打滑率与该数值存在一定的偏差,这是因为真实树干截面并不是理想的圆形,而且驱动轮在夹紧树干时会存在一定变形,会导致其直径略小于原始直径80 mm。
3.3 修枝性能测试
活立木的树干其径围由底部向上是逐渐减小的,即存在所谓的梢度,由攀爬装置受力分析可知,桉树爬树修枝机的攀爬性能受林木直径大小的影响,为减少林木直径的大小对修枝性能评价的干扰。修枝性能测试在模拟的树干上进行,测试时,先在竖直安装的直径为90 mm圆形钢管上钻孔,并在孔中插入不同大小的桉树树枝来模拟桉树树干,然后操纵手持遥控器使桉树爬树修枝机沿着模拟的桉树树干往上爬升,并利用其中的动刀片和定刀片完成修枝,如图9所示。测试结果表明,桉树爬树修枝机能够顺利地剪断直径在10 mm以内的枝条。对直径大于10 mm的枝条,下面结合桉树爬树修枝机的结构参数做进一步分析。
对于桉树爬树修枝机,其图3所示的结构参数L1、L2、L3和L4在设计时已经确定,不会随着所攀爬的树干直径的变化而变化,其数值分别为170,40,7和35 mm,L5则会随所攀爬的树干直径的变化而变化,当树干直径D为90 mm,其数值为86 mm。由于未开展过实验测定从动轮与作为模拟树干的钢管之间的滚动阻力系数μr以及驱动轮与作为模拟树干的钢管之间的滚动阻力系数μ′r,为了评估桉树爬树修枝机的修枝情况,在此假设μr和μ′r相等并参考文献[3],取它们的数值为国槐与轮胎的滚动摩擦系数,即μr=μ′r=0.104。通过实验测得橡胶与钢的静摩擦系数为0.47,以该数值作为驱动轮与模拟树干之间的静系数μ的取值,即取μ=0.47。将L1=170 mm、L2=40 mm、L3=7 mm和R=D/2=90/2=45 mm代入式(3),求得N1(或N2)与桉树爬树修枝机对称线的夹角为:

图9 桉树爬树修枝机的修枝性能测试Fig.9 Pruning performance test of the pruning machine for eucalyptus trees

=63.43°
(24)
将L1=170 mm、L2=40 mm、L3=7 mm、R=45 mm和F=600 N代入式(8),求得:
N=223(N)
(25)
令a=0,并将L1=170 mm、L2=40 mm、L3=7 mm、L4=35 mm、L5=86 mm、R=45 mm、γ=63.43°、m=9.8 kg、μ=0.47、g=10 m/s2以及μr=μ′r=0.104代入式(15)的右边,得:
(26)
令a=0,将L1=170 mm、L2=40 mm、L3=7 mm、R=45 mm、γ=63.43°、m=9.8 kg、μ=0.47、g=10 m/s2以及μr=μ′r=0.104代入式(20)的右边,得:

(27)
由于电动推杆的最大拉力F仅为600 N,即电动推杆的推力不满足式(15),但满足式(20),这表明,在现有的桉树爬树修枝机结构参数下,驱动轮不打滑且可以获得加速度,但原来力学分析的假设(N′3为正值时,N′3充当有效力,N4不存在)不成立,此时的真实情况是N4充当有效力,N′3不存在,即其值等于零,以-N4替代N′3代入式(10),得:
N″3-N4=N3
(28)
由∑MQ″=0,得:
N″3×L4-μrN″3×R(1+cosγ)+N4×(L4+L6)+N4×2R-(mg+ma)×[L5+R(1+cosγ)]=0
(29)
综合式(28)、式(29)和式(9),求得:
(30)
综合式(28)、式(29)和式(9),求得:
(31)
假设左驱动轮和右驱动轮与树干之间的总摩擦力达到静摩擦力的最大值,即Ff=2 μN,且以μdN4代替μrN′3代入式(16),得:

(32)
已知L6=133 mm,取μd为钢-钢的动摩擦系数且令μd=0.15,并将式L4=35 mm、L5=86 mm、L6=133 mm、R=45 mm、γ=63.43°、m=9.8 kg、g=10 m/s2、μ=0.47、μr=μ′r=0.104以及式(25)代入式(32),得:
a=2.88 (m/s2)
(33)
此时,为避免左驱动轮(或右驱动轮)与模拟树干产生打滑,左驱动轮(或右驱动轮)的驱动力应小于Fτmax:
Fτmax=μN=0.47×223=104.81(N)
(34)
左驱动轮(或右驱动轮)的扭力应小于或等于Tmax:
(35)
由于移动电源以两个串联在一起的12 V铅蓄电池作为替代,其电压U为24 V,而无刷电机的KV值为1 000,减速器的减速比i为36∶1,据此可以算出左驱动轮(或右驱动轮)的最大转速ω为:
(36)
桉树爬树修枝机的最大攀爬速度vmax为:
(37)
若减速器的传动效率η为97%,则左无刷电机(或右无刷电机)的输出功率应小于或者等于Pmax:
(38)
桉树爬树修枝机的消耗功率P为:
P=2Pmax=2×301.55=603.10(W)
(39)
由此可知,在现有的电动推杆推力(600 N)下,桉树爬树修枝机的加速度可达2.88 m/s2,最大爬升速度为2.97 m/s,修枝过程中所消耗的功率为603.10 W。由式(34)和式(8)可知,在电机功率足够大的情况下,应进一步增加攀爬装置的夹紧力N,即增加电动推杆的推力F,才能使桉树爬树修枝机获得更大驱动力以剪断直径更大的枝条,并且由式(26)可知,只有电动推杆的推力F大于1 573 N,才能避免动刀片与树干接触,将该F代入式(8),再代入式(34)和式(35),结合式(36)、式(38)和式(39),可以算得此时桉树爬树修枝机消耗的功率1 585.73 W。
4 结 论
结合桉树的通直度较其他林木高的特点,本研究设计了一种由修枝装置和攀爬装置组成的桉树爬树修枝机,对攀爬机构进行动力学分析,确定其驱动轮不打滑时,驱动轮与树干之间的摩擦系数和攀爬装置夹紧力分别与修枝机结构几何参数和运动参数的关系式,根据滑切切割可降低切割阻力的原理,确定修枝装置的主要结构参数,并测试了桉树爬树修枝机的攀爬性能和修枝性能,得到的主要结论如下:
1)修枝装置的切割阻力受切割刀片的倾角影响,切割刀片的倾角增大可增大滑切作用,有利于减少切割阻力,但也会影响桉树爬树修枝机的结构布置和总体质量,设计时应进行综合的取舍。
2)桉树爬树修枝机能够顺利沿着树干往上爬升,虽肉眼观察未见驱动轮有打滑的情况,但存在一定的打滑,打滑率为10.03%。
3)在模拟树干上,桉树爬树修枝机能够顺利剪断直径10 mm以下的桉树的枝条,所消耗的功率为603.10 W,而剪断直径更大的枝条,在电机功率足够大的情况下,则需要进一步增加攀爬装置的夹紧力。
