边缘保持滤波的遥感影像多特征联合分类
2021-03-30曹海春
曹海春
(山西工程职业学院,太原 030031)
0 引言
随着近年来我国航天技术、计算机技术的快速发展,影像的空间分辨率不断提高,大量卫星影像被用于国土资源调查、地理国情监测、国土规划、抢险救灾等领域。
随着影像分辨率的提高,影像上地物目标的表达变得更加丰富,细节特征突出,加大了精细目标识别分类的优势,但也带来了相同地物目标光谱差异变大,增加了地物不可分性。同时,不同地物目标出现相似性增强,导致不同地物的光谱相似性增大。空间分辨率的提高必然导致局部相同地物的信息冗余,增加数据处理的计算量和复杂程度。较高的空间分辨率增加相邻地物边缘微小差别的分辨能力,同时也可能带来“海量数据灾难”,导致地物边界分辨模糊、地物分类精度下降等问题。因此,构建适用高空间分辨率的分类器是遥感影像分类的重点。集成学习[1]、模糊神经网络(fuzzy neural network,FNN)[2]、支持向量机(support vector machine,SVM)[3]、极限学习机(extreme learning machine,ELM)[4]等影像分类算法的提出和应用促进了高分辨率遥感影像分类的发展。其中ELM分类器在极快的模型学习训练过程中提供良好的泛化性能,有效缓解“海量数据灾难”等影响,且能够在小样本、地物分布复杂多变的高空间分辨率遥感影像上提高影像的分类精度,在高分辨率遥感影像数据分类领域应用越来越广泛。此外,高空间分辨率遥感影像上局部地物像元并非无序排列、相互独立的光谱特征向量,局部像元往往属于同一地物,具有相似的特性[5]。将光谱特征与空间特征结合作为极限学习机的输入,进行快速学习产生极限学习机的隐含输出层,构建光谱特征与空间特征结合的遥感影像分类模型,进而提高分类的精度和稳定性[6]。楚恒等[7]提出多特征多核极限学习机(multi-kernel extreme learning maching,Multi-kernel ELM),采用多核ELM分类器从不同多特征样本数据进行映射,充分表达地物的空间特征-光谱信息。王明常等[8]提出利用极限学习机分类器对影像的光谱特征进行分类,验证该分类器在GF-2影像上的可行性。张成坤等[9]提出光谱-空间联合特征,构建高光谱影像的特征表达,以提高影像的分类精度,但缺少对影像纹理特征及典型地物对应的典型指数的考虑。王传立等[10]提出利用多核极限学习机进行遥感影像林地信息提取,通过将多核理论与多特征结合实现林地信息的有效提取。上述方法是将不同类型的影像特征以不同的融合方式引入到极限学习机中,获得较好的分类结果,但都缺少对高分辨率影像局部细节信息增加导致边缘区影像不可分的研究。
针对高空间分辨率影像在分类时存在的“海量数据灾难”“椒盐现象”、地物边缘不可分性增强现象,结合相邻像元间存在较强的光谱相似性,利用多特征结合技术与边缘保持滤波(edge-preserving filtering,EPF)技术,提出边缘保持滤波的高分辨率多遥感影像多特征联合的分类方法。通过植被特征、影像对比度特征、影像空间特征及影像纹理特征的提取,辅助光谱特征进行影像信息的有效表达。首先,训练多核极限学习机分类器获得每个像素的初始分类概率;然后,对由所有像素初始分类概率组成的分类概率图进行边缘保持滤波;最后,由滤波后分类概率图对应值的大小确定像素点的类别。
1 边缘保持滤波
高空间分辨率遥感影像在数据的采集、传输过程中,受到大气中细小颗粒的影响,通常会存在一定量的噪声,导致相同地物的光谱曲线存在一定的波谱差异。对小样本训练的极限学习分类器提高了高分辨率遥感影像分类结果的精度。通过有效的空间滤波可以缓解地物“同物异谱”“同谱异物”现象,消除噪声对影像分类的影响。双边滤波、引导滤波是提取影像边缘空间约束因子信息,同时保持边缘平滑的滤波算法。
1.1 联合双边滤波
联合双边滤波器是一种对影像像素灰度相似性与局部空间距离进行综合表达的滤波方法,通过引入灰度信息与空域信息,达到去噪保边效果。基本数学原理可以表示为式(1)、式(2)。
(1)
(2)
式中:i表示影像空间wi的位置;Ii表示影像i像素


(3)
(4)
(5)
由式(4)、式(5)可知,局部区域影像wi内的像素点,对空间相似的区域,该滤波器能够有效地平滑空间值;对于不同地物的边界区域,该区域像素空间相似性较小,对应的相似性权重wi,j较小,减少了因不同地物边界带来的非噪声的影响。因而,采用联合双边滤波器能有效地保留地物的边界信息同时去除噪声信息的干扰。
1.2 引导滤波
影像可以表示为一个二维的信号,通过引入一个线性的引导滤波器,该滤波函数可以在二维窗口上进行输入与输出。滤波函数可以表示为式(6)。
oi=akIi+bk,∀i∈wk
(6)
式中:wi为影像空间域k的局部区域;ak、bk为满足线性滤波函数的系数;Ii为影像像素值;oi为经过引导滤波的输出值。对线性引导滤波器进行求导可以得到:∂Oi=ai∂Ii,获得输入影像的梯度乘以一个常数。因此,引导滤波具有保存边缘的效果。引导滤波系数ak、bk通过影像输出值与真实值p间差距平方和最小为目标函数进行求解,即
(7)
(8)
(9)
式中:|w|为局部区域影像wi的像素个数。引导滤波器与双边滤波器相比具有更好的边缘保持能力。
2 基于边缘保持滤波的高分辨率遥感影像多特征联合分类
2.1 多特征提取
高分辨率遥感影像包含丰富的影像信息,采用常规的光谱信息进行影像分类容易造成地物分类精度较差的问题。通过引入影像的植被指数、纹理信息、影像对比度等信息能够有效提高影像的分类精度。影像的对比度是光学影像一种常见的基本特征,反映地物目标与背景的差异。利用局部对比度AC算法提取影像的对比度特征,考虑了影像感知单元与局部空间区域的对比关系,避免对比度影像整体偏亮或偏暗现象[11]。遥感影像上普遍包含大量的植被区域,因此植被区域提取结果的好坏直接影响影像整体分类的结果。利用影像的近红波段和红外波段间的关系通过加减乘除运算突出影像上的植被信息、弱化非植被信息,有效地提取植被的覆盖程度与生长状况,较为常用的是归一化植被指数[12]。高分辨率遥感影像上地物局部细节信息丰富,采用圆形的局部二值模型能够有效减弱噪声的影响,提取影像上排列规则、细微的地物信息[13]。因此,采用局部对比度、归一化植被指数、局部二值模型等多种特征作为光谱特征的补充,为后续极限学习机分类的训练提供有效的信息支撑。
2.2 极限学习机初始分类概率图
为了充分利用影像的光谱特征、纹理特征及成熟的特征指数等信息,将2.1节提取的特征进行串联处理获取特征向量fn,n为对应像素样本号。对所有的样本进行多特征的提取、排列,构成样本的特征矩阵F,F=[f1,f2,…,fN],N为随机选取的样本数量。随机抽取m个样本,构成子特征样本矩阵F(indexk,:),将此特征矩阵作为第k分类器的输入,利用极限学习机对样本子类训练,输入层与隐层间的权值WK采用式(10)计算获取,Bk偏值矢量采用式(11)计算获取。
WK=2*R(L,size(indexk,1))-1
(10)
Bk=R(L,1)
(11)

Hk=(G(Wk*F(indexk,:)+Bk))T
(12)
利用式(12),通过输入样本与对应的类别,计算获取中间层的权重矩阵WK,进而获得第k个弱分类器classifierk对应的分类参数{Wk,Bk,indexk,βk,G}。通过提取影像的多种特征获取特征向量f,输入弱分类器classifierk,得到一个分类向量Sk。
2.3 边缘保持滤波的高分辨率影像分类
针对高空间分辨率影像在分类时存在的“海量数据灾难”“椒盐现象”、地物边缘不可分性增强现象,利用高分辨率遥感影像信息丰富、相邻像素空间影像局部区域内具有较强的相似性,本文提出边缘保持滤波的高分辨遥感影像多特征融合的分类方法,通过影像多种特征信息的提取降低“海量数据灾难”的影响,结合边缘保持滤波算法减弱局部相似影像信息,突出相邻地物边界信息。算法流程见图1。
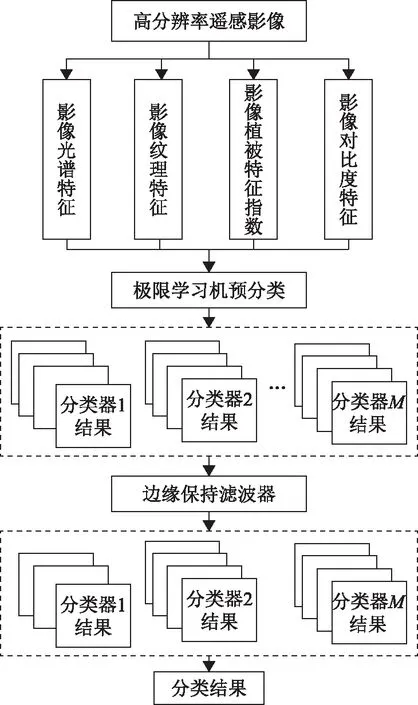
图1 边缘保持滤波的遥感影像多特征联合分类流程图
在高分辨率遥感影像上,影像局部区域存在大量的相似性地物,仅依靠光谱特征很难区分不同地物信息,通过对影像的局部对比度、归一化植被指数、局部二值模型特征的提取可有效补充影像光谱特征信息,充分发挥多种特征的优势,更好地体现不同地物的差别。

(13)
式中:Wi,j为边缘保持滤波器输出权值。联合双边滤波器和引导滤波器的输出权值如式(7)、式(8)、式(9)所示。
每个弱分类器以滤波后像素对应的概率值最大的索引j为目标类别,如式(14)所示。
label(k)=argmaxj∈[1,2,…,c]{sk(j)}
(14)
然后,将M个弱分类器的所有分类结果{lable(k)}k=1,2,…,M进行直方图分类统计{bin(j)}j=1,2,…,M,采取投票表决的方法估算像元属于的类别,如式(15)所示。
(15)
3 实验仿真
为了验证本文提出分类方法的可行性,采用2组典型区域的高分二号卫星影像进行实验。
本文采用的实验数据集为武汉大学计算视觉与摄影测量研究组发布的高分遥感影像数据集(GaoFen image dataset,GID)。该数据集收集60多个不同城市的150幅高质量的高分二号卫星影像,覆盖面积超过50 000 km2。在数据内部随机裁剪1 000像素×1 000像素的影像块作为训练数据集,共选取5块,其中4块作为样本集、1块作为检验数据进行实验。为了进一步验证算法的有效性,采用某地区的2组高分二号卫星进行实验验证。
将本文算法与SVM和Multi-kernel ELM、EPF算法进行对比。通过每类的分类精度、平均分类精度、总体精度、Kappa系数、耗时等多个指标进行评价,通过20次重复实验的平均精度作为算法的性能评价。
3.1 GID数据集测试
在GID数据集上进行测试,实验结果如表1所示,其中图2(a)至图2(d)为样本集,图2(e)为检验数据。
1)在联合双边滤波器中,σS与σω2个参数对影像的分类精度影响较大。提取多种特征组合的影像滤波参考影像,取σω=0.2。探讨参数σS对多特征组合影像分类精度的影响。图3(a)表明分类精度随着σS值的增加先快速增加后慢慢降低。分类精度在σS=3时取最大,取该值探讨σω对多特征组合影像分类精度的影响。图3(b)表明分类精度随着σω值的增加先增加后趋于稳定,当σω=0.2时影像分类精度最大,为93.36%。

图2 GID数据集

表1 GID数据不同分类方法分类精度

图3 双边滤波器参数对分类精度的影响
2)在引导滤波器中,ω与ε2个参数对分类精度影像较大,采用与联合双边滤波的分类器相似的分析方法,如图4所示,ω=3与ε=10-1时影像分类精度最高,为93.65%。在3.2节高分二号影像上进行分类时,采用上述参数进行处理。

图4 引导滤波器参数对分类精度的影响
3)采用相同的样本数据对比SVM算法、Multi-kernel ELM算法、EPF算法及本文方法进行实验,其中SVM算法组合影像的光谱特征与纹理特征,Multi-kernel ELM是基于光谱特征、纹理特征、空间特征等多种特征结合的多核ELM分类器进行分类,EPF采用双边滤波与光谱特征结合的方式进行分类。从分类结果精度可以看出,本文提出的边缘保持滤波的多特征联合的分类方法分类结果明显优于SVM算法、ELM算法、EPF算法,分类精度最高为93.65%。文中采用多种特征联合的方式,避免对海量遥感数据进行分类处理,提高算法的整体效率,减少分类过程的复杂计算,所以整体耗时较少。
3.2 高分二号数据测试
利用高分二号数据集样本数据训练获取联合双边滤波器、引导滤波器中对分类结果影像较大的参数。充分利用高分辨遥感影像的多种特征,采用极限学习机对样本子类训练,获得多个弱分类器,对每个弱分类器计算的概率影像进行边缘保持滤波处理以减少“椒盐噪声”的影像。本文方法的高分二号影像的分类结果见图5(b)、图5(d),各类地物的分类精度见表2。

图5 分类结果图

表2 高分二号数据不同分类方法分类精度
从目视效果上看,本文方法获取的分类结果避免“椒盐噪声”的影像,地物提取相对比较完整;影像上的道路基本提取出来,且道路边界比较清晰;但也存在部分裸地错分成了建筑物与道路的现象,但整体分类结果具有高度的空间一致性,能很好地区分各类地物的差异,分类效果较好,既能保证相邻地物类别的一致性,也能够清晰地保留不同地物的边界信息,能够准确、可靠地反映不同地物的实际分布情况。
表2为不同方法对高分二号2组数据的分类精度。通过表2可知,由于Multi-kernel ELM算法充分利用光谱特征、纹理特征、空间特征等多种特征并结合了多核ELM进行分类,分类精度相比SVM算法有了较大的提高;本文提出的分类方法取得较为理想的分类结果,并且在分类时间上较SVM与Multi-kernel ELM方法有明显优势。从分类精度可以看出,本文方法分类效果优于其他方法,实现了大多数地物的准确划分。通过多种影像特征的联合,既能充分利用影像的多种特征信息,也能降低极限学习机的计算复杂度,节省了大量时间成本,同时获得了良好的分类结果。
4 结束语
本文提出边缘保持滤波的高分辨率遥感影像多特征联合的分类方法,联合影像的光谱特征、纹理特征、植被指数特征、对比度特征有效补充影像光谱特征信息,充分发挥多种特征的优势,更好地体现不同地物的差别,降低运算量。对联合特征采用极限学习机分类器获得多个弱分类器的初始分类概率图,并利用多特征联合影像构建边缘保持滤波器,处理预分类器获得初始概率影像,通过投票表决的方法确定每个像素的类别。该方法能有效解决高分辨率影像在分类时存在的“海量数据灾难”“椒盐现象”、地物边缘不可分性增强现象,分类结果能够突出地物边界、真实可靠地反映地物分布的实际情况。
