某型双座电动飞机设计与试验
2021-03-27范振伟杨凤田李亚东项松赵为平
范振伟,杨凤田,李亚东,项松,赵为平
1. 沈阳航空航天大学 通用航空重点实验室,沈阳 110136 2. 辽宁通用航空研究院,沈阳 110136
电动飞机是以电机带动螺旋桨、涵道风扇或其他装置产生前进动力的飞机,电机的电源来自电池、燃料电池、太阳能电池、超级电容或功率束[1]。
电动飞机从绿色环保、高效节能的理念出发,极大地提高了飞机的环保性和舒适性,为绿色航空提供一条光明的技术途径,是绿色航空未来的发展方向[2]。近年来,在全球范围内兴起了电动飞机技术研发热潮。据Roland Berger咨询公司统计,截至2019年10月,全球约有240个在研的电动飞机项目。该公司对2017年研发的70类电动飞机项目进行了统计,统计结果表明:欧洲的项目占45%,美国的项目占40%,其他国家占15%。2019年6月巴黎航空展上,以色列初创企业全电动飞机“Alice”备受关注。该飞机一次可承载9人,充电一次最多可飞行1 000 km左右,并获得美国马萨诸塞州一家航空公司订单。空客、波音、达索、GE航空和联合技术公司等航空制造商发布联合声明,将电推进技术列为航空业“第三时代”的重要标志,承诺将加大电动飞机技术研发力度、推动航空业绿色发展[3]。
在国内,沈阳航空航天大学从2010年开始开展新能源电动飞机的研制工作。同时,国内一些学者也做了大量的研究工作。项松等[4]设计了某型电动飞机的固定桨距螺旋桨,并进行了电动飞机螺旋桨的地面试验和风洞试验。试验结果表明:螺旋桨效率达86.76%,达到设计要求。刘福佳等[5]针对电动飞机在飞行过程中质量保持不变的特点,提出了适用于电动轻型飞机的按任务剖面、按商载和航程估算起飞总质量的方法,并对任务剖面法解的存在性和收敛性进行了分析。王书礼和马少华[6]据某型电动飞机的飞行剖面,建立了电机控制器的系统损耗的热阻网络模型,对电机控制器IGBT(Insulated Gate Bipolar Transistor)模块的温度进行计算,根据计算结果对电机控制器的散热结构进行了改进。地面台架样机试验结果表明:改进的风冷散热器能够满足电动飞机电机控制器的散热需求,且重量降低5%。顾超等[7]对某型电动飞机的载荷传递进行了理论分析,建立了飞机结构数学模型,并进行了强度计算,最终形成了一套适合轻型电动飞机的结构快速试验验证方法。康桂文和胡雨[8]结合某型超轻型电动飞机的设计参数,提出了超轻型电动飞机的电动力系统参数匹配的方法。进行了地面试验和测试,结果表明:该参数匹配和性能验证方法具有实际应用价值。李玉峰和宁昭义[9]针对载人电动飞机电推进系统的可靠性评估问题,以电推进系统模型为基础,提出了GO(Goal-Oriented method)法与状态概率矩阵算法结合的运算方法对系统进行可靠性建模与仿真计算。赵为平和项松[10]根据某型电动飞机设计要求,对电动飞机系统可靠性分配问题进行了研究,在分析成本函数和广义成本函数特点的基础上,重新构建了能够较好描述电动飞机分系统成本特性的成本函数。以整机可靠性作为优化的约束条件,结合遗传算法优化得到了电动飞机可靠性分配结果和整机的成本指数。
Xiang等[11]提出一种改进的电动飞机螺旋桨设计方法,根据某型电动飞机在巡航状态的飞行速度和推力等设计要求,设计出螺旋桨,进行缩比模型风洞试验验证了该设计方法的准确性。项松等[12]采用片条理论对某型电动飞机螺旋桨的气动性能进行计算,并与风洞试验结果进行对比,证明了片条理论具有高精度性。Romeo等[13]设计,制造和测量了氢燃料飞机的螺旋桨,考虑到飞机电动机和燃料电池的降温问题,通过数值分析和程序设计对螺旋桨进行了优化设计,而且将安装螺旋桨后的飞机进行了特定测试,验证了推进系统和冷却系统的效率。Romeo和Frulla[14]设计了一种高空长航时的无人太阳能飞行器,白天吸收太阳能源来飞行和储存到电池内,开发了飞行程序,对飞行平台进行了参数化研究,使用计算流体力学软件分析了几个剖面和机翼平面图,进行风洞试验,分析了飞行器的飞行性能。Romeo和Borello[15]开发和验证基于燃料电池的动力系统用于电动飞机的推进,通过提供20 kW的最大连续功率的电池组来对飞机在爬升和下降情况下的参数分析,以及评估其他关键技术对新能源飞机的影响。Chen PW和Chen KJ[16]分析了某型轻型飞机的整体碰撞性能,利用有限元法对碳纤维机身进行了动态冲击数值模拟,得到复合材料座舱的安全碰撞区域比铝合金座舱大160%。Azadeh等[17]提出了一种在视觉飞行规则下运行的轻型飞机的路线优化算法,寻找在3个空间维度上找到最小持续时间,无碰撞的路线,制定了混合整数线性模型,引入了两阶段路线优化模型和通过实验来计算效率。Frosina等[18]开发出一种简易模型来评估混合动力推进系统的轻型飞机的性能,采用的方法结合了0D/1D仿真,在飞行任务中节省多达20%的燃料。Carlo等[19]提出了通用航空类电动飞机初始重量分级技术,基于多种常规飞机典型程序,整合在一个共同的框架中,将设计方法应用到串联混合动力推进系统中。Lee等[20]研究了基于GPS(Global Position System)的轻型飞机在着陆模式下的导航、制导和飞行控制的设计问题,设计了具有结构不确定性飞机参数的鲁棒控制自动驾驶仪。李亚东等[21-22]对采用辛卜生积分和龙格-库塔求微分方程的计算方法和飞行试验,分析了某电动飞机起飞爬升性能,并满足了适航条特点。刘福佳等[23]给出了电推进系统选型与参数匹配的设计过程,提出了一套电推进系统选型与参数匹配的方法。
沈阳航空航天大学一直致力于新能源电动飞机研制,某型双座轻型电动飞机于2012年6月立项研制,反复进行各系统试验和飞行试飞。飞行试验数据显示,该型号电动飞机满足适航条款要求、达到飞行安全指标。
1 飞机设计参数
研制任务为设计、制造一款满足飞机设计技术要求的双座电动轻型飞机,并通过对飞机地面和试飞试验,全面符合适航认证基础相关条款要求,最终取得飞机型号设计批准书(TDA)。电动飞机用于昼间、简单气象条件,目视飞行,主要用于教练和娱乐飞行,同时具有自升式滑翔飞行能力。根据ASTM F2245《轻型运动飞机设计与性能规范》要求,此型号电动飞机应满足的机动飞行能力包括:① 正常飞行的机动;② 缓8字,急上升转弯;③ 坡度不大于60°的急转弯;④ 失速和尾旋(如果对该型号批准尾旋)。
电动飞机的主要飞行性能包括最大平飞速度、最大飞行高度、最大使用过载等,具体性能指标如表1所示。
飞机为大展弦比上单翼、T形尾翼、前三点固定式起落架、前置螺旋桨、并且双座两侧开门的布局形式。动力装置为一台无刷永磁电机,用电机控制器调速,动力源为锂聚合物电池;机体结构为用高性能碳纤维复合材料;仪表采用机械式飞行仪表与动力综合显示仪表;操纵系统采用推拉钢索形式。由于受动力装置现状限制,按照ASTM F2245《轻型运动飞机设计与性能规范》的要求,飞机最大起飞重量不得超过500 kg。电动飞机总体设计参数表如表2所示。

表1 某型电动飞机性能指标Table 1 Performance parameters of electric aircraft
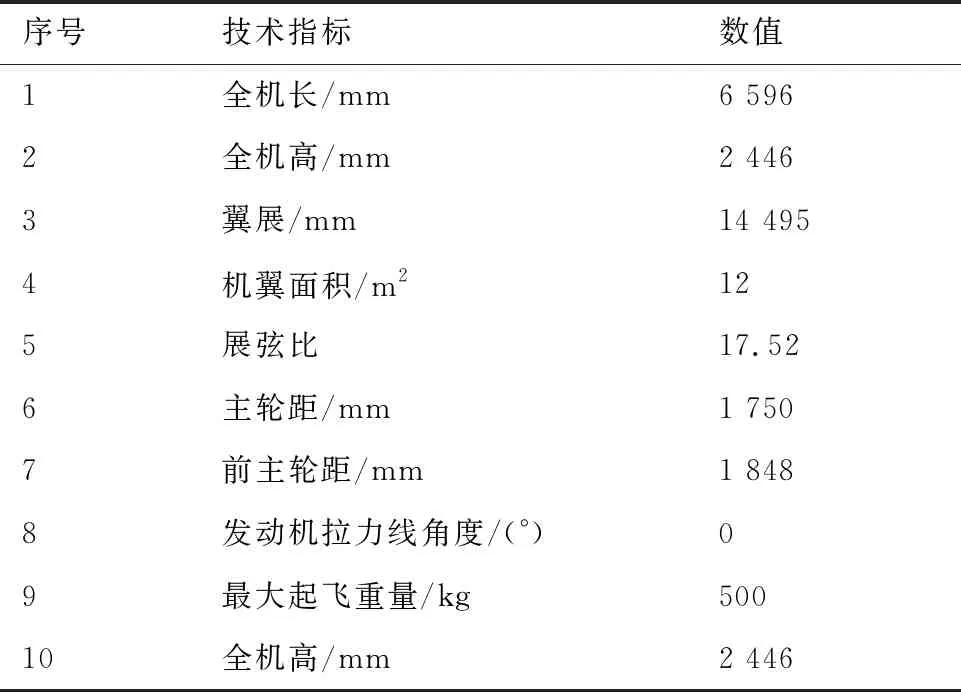
表2 某型电动飞机总体设计参数Table 2 Overall design parameters of electric aircraft
2 飞机总体布局和内部配置
2.1 飞机总体布局
电动飞机采用全复合材料结构,结构材料以碳纤维和玻璃纤维为主。机体结构主要包括机身、机翼、尾翼、起落架等四大部分。电动飞机三视图和总体布置图如图1和图2所示。

图1 电动飞机三视图Fig.1 Three views of electric airplane

图2 电动飞机总体布置图Fig.2 General layout of electric aircraft
2.2 飞机座舱布置
飞机座舱内有并列双套联动中央驾驶杆和脚蹬;前方为仪表板见图3;两座椅之间的中央操纵台上有油门杆、刹车手柄;风挡框架左侧有灭火瓶;座椅靠背角为26°,座舱布置图见图4。
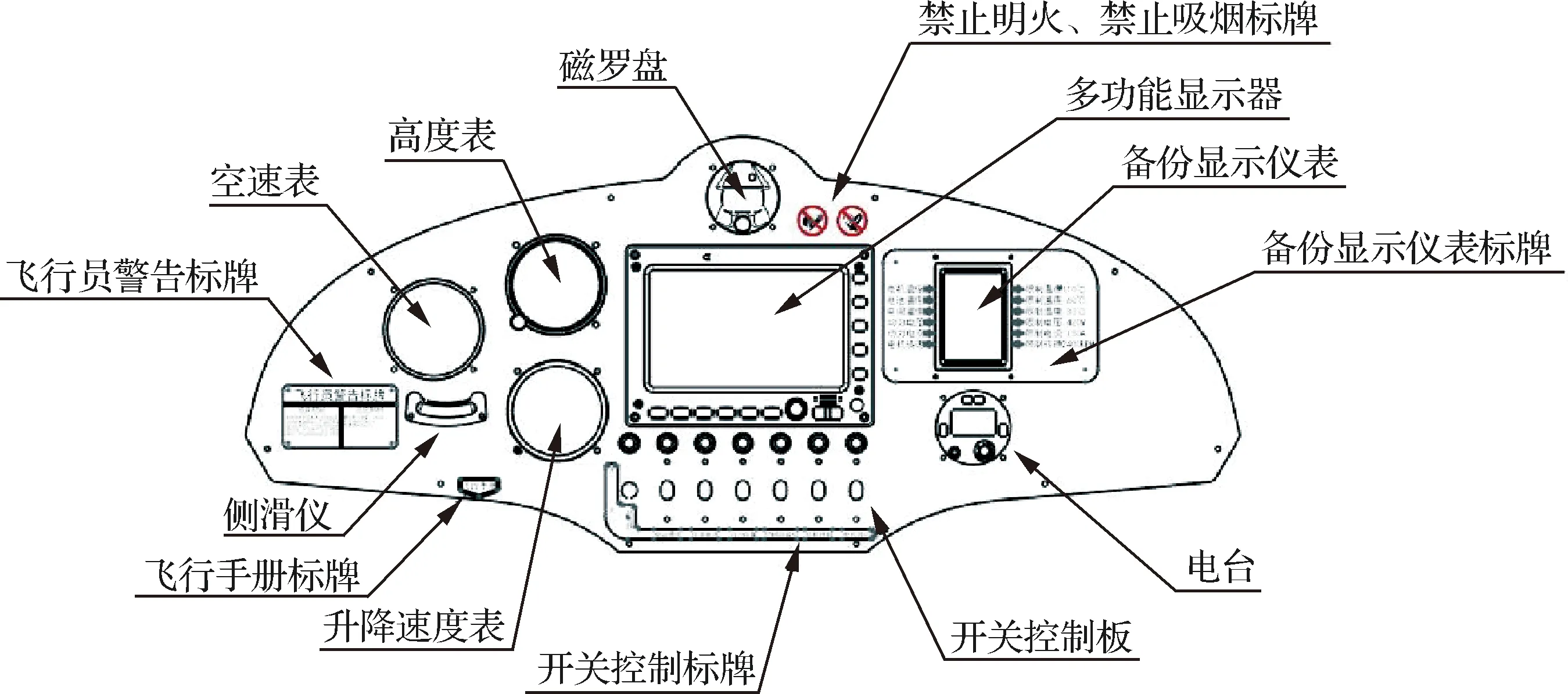
图3 电动飞机仪表盘Fig.3 Electric aircraft instrument panel
2.3 飞机结构布置
电动飞机采用以碳纤维和玻璃纤维为主的全复合材料结构,包括机身、机翼、尾翼、起落架,飞机结构图见图5。其中机身主要包括电推进装置舱、防火墙、座舱、电池舱、隔框、垂直安定面等,机身结构构架见图6;机翼采用大展弦比双段翼形状,结构由主翼、副翼、扰流板三部分组成,主翼结构包括机翼蒙皮、翼梁、后墙、根肋、普通肋等,机翼结构布置见图7;尾翼结构尾包括水平安定面、升降舵和方向舵;起落架由前起落架和主起落架两个部分组成,前起落架采用弹簧减振形式,具有地面滑行转向功能,与方向舵联动,主起落架采用板簧减振形式,地面滑行时具有刹车功能。
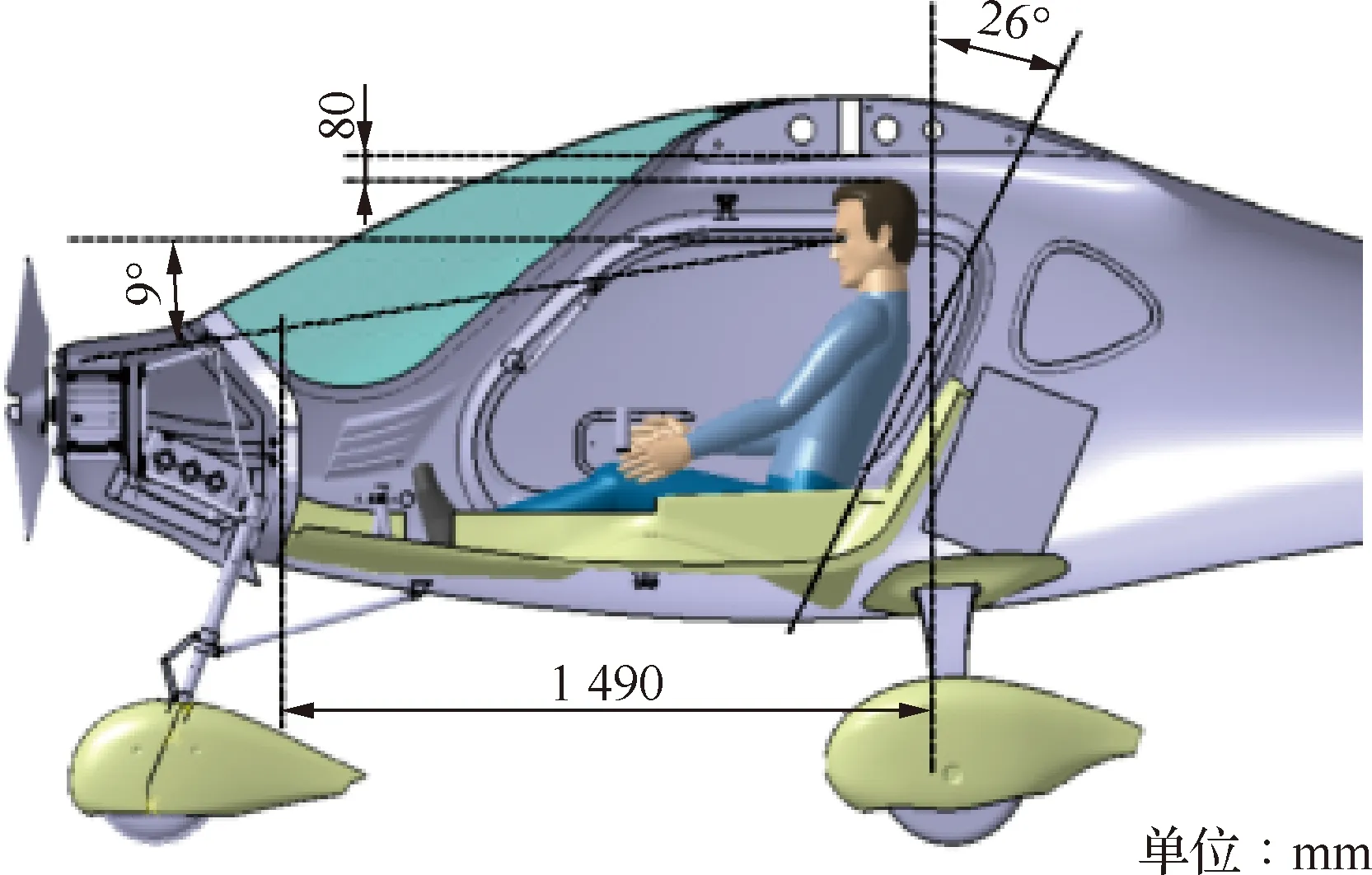
图4 电动飞机座舱布置图Fig.4 Electric aircraft cockpit layout

图5 电动飞机结构图Fig.5 Structure of electric airplane

图6 机身结构构架图Fig.6 Airframe structure diagram

图7 机翼结构布置图Fig.7 Wing structure layout
3 电动力系统
电动飞机动力系统包括:电动机、控制器、动力系统综合显示仪表;螺旋桨;电池组、电源管理系统(BMS)。研制了基于新型稀土永磁电机和高效电池的实用飞机电推进系统,形成了电机驱动系统、动力电池、螺旋桨的高效集成技术。动力系统组成见图8所示。
3.1 电机及安装
采用轻量化风冷永磁同步电动机见图9,具有极高的连续转矩密度及较高的效率,可用于直接驱动螺旋桨。在转速为2 000 r/min左右其持续功率可达30 kW,效率为93%,而其重量16.6 kg。
发动机安装架为焊接结构,发动机安装架与机身一框、发动机、电调间均采用螺栓连接,主要起到固定发动机和电调的作用。其结构如图10所示。
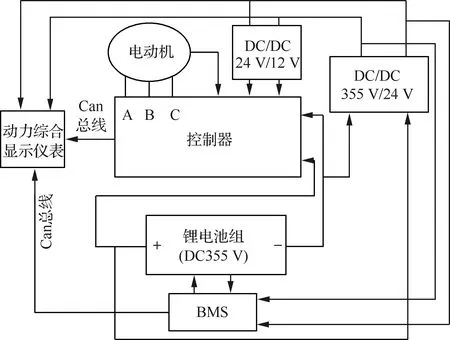
图8 动力系统组成框图Fig.8 Block diagram of power system

图9 永磁同步电机Fig.9 Permanent magnet synchronous motor

图10 发动机安装架结构示意图Fig.10 Diagram of engine mounting frame structure
3.2 锂电池组
飞机锂电池经动力组与总体组协调,确定电池组总能量需求为8.8 kW·h,电池组额定工作电压为355 V。采用25 A·h的电芯。整个电池组分为4个模块布置,总重量限制在80 kg内。
锂电池组固定在座椅后的电池舱内,见图11,安装结构由通航研究院自己设计,其强度经过地面试验验证。

图11 锂电池组安装位置Fig.11 Installation position of lithium battery pack
3.3 螺旋桨
螺旋桨采用辽宁省通用航空研究院自行设计的木质双叶螺旋桨,其直径为1.6 m。螺旋桨外形和效率变化如图12和图13所示。
螺旋桨静态拉力计算如下:
(1)
式中:HP为功率,HP=40/0.735=54.421 8 hp(1 hp=745.7 W);DIA为螺旋桨直径,DIA=1.6×3.28=5.248 feet(1 feet=0.304 8 m);ρ0为海平面大气密度;ρ为飞行高度下的空气密度。

图12 螺旋桨数模Fig.12 Propeller numerical model

图13 效率计算结果与试验结果对比Fig.13 Comparison of numerical results and test results of efficiency
4 气动特性
4.1 气动布局设计
飞机布局形式定为大展弦比的上单翼、T型尾翼布局,气动布局基本参数为:机翼展长14.5 m;机翼面积12 m2;展弦比17.52;根弦相对厚度14%;梢弦相对厚度12%。
根据以上给定的技术指标,以巡航状态为设计点开展气动布局设计工作。由此可确定的设计指标有:
巡航升力系数CLcruise为
(2)
最大升力系数CLmax为
(3)
式中:W为电机功率;S为机翼面积;VC为巡航速度;VS为失速速度。
针对轻型电动飞机的特点和使用要求,采用遗传算法进行了轻型通用航空飞机翼型的优化设计研究。图14为升力系数CFD验证结果。为了满足工程需要,结合飞机型号设计要求,采用约束条件与优化目标想结合的方法确定了目标函数,使用Hicks-Henne型函数进行低雷诺数翼型参数化描述,将气动计算软件与遗传算法相结合,形成了基于遗传算法的轻型电动飞机翼型气动优化设计方法。
采用通用飞机低速高升阻比翼型/机翼设计技术和大展弦比通用飞机全机布局气动力快速评估方法。设计了验证机的气动布局,对验证机缩比模型进行了风洞试验。通过试验验证优化了飞机各部件的布局方案,研究飞机气动力的基本特性,测量各舵面的舵面效率,确定气动布局的设计方向等,突破了层流翼型大展弦比机翼与高升阻比整机气动布局设计技术。图15为整机升阻比K随迎角变化曲线,飞机巡航状态迎角为2.5°,若考虑雷诺数效应(风洞试验雷诺数为70万左右,飞机实际飞行时雷诺数为150万左右,雷诺数效应同样的飞机,雷诺数越大其升阻比越大),飞机实际飞行的升阻比大于24。

图14 升力系数CFD验证结果Fig.14 Lift coefficient CFD verification results

图15 整机升阻比随迎角变化曲线Fig.15 Lift-drag ratio changing with angle of attack of whole plane
根据上面的飞行速度、机动限制载荷系数绘制飞行包线图,如图16所示。

图16 飞行包线图Fig.16 Flight envelope
4.2 飞行品质计算
电动飞机的性能计算,飞行高度按照海平面ICAO的标准大气和静止空气条件予以考虑。依据风洞试验和重量重心等数据,建立了飞行动力学数学模型,在其基础上,通过配平手段根据以及ASTM F2245-11条例要求,对飞机的失速速度、起飞、爬升等性能进行了分析和计算。
飞机的很多参数都是以失速速度为基础确定的。这样在计算任何飞机起飞爬升的性能参数时,首先要知道失速速度的大小以及此状态对应的构型。RX1E电动飞机未加襟翼,属于干净构型,其Vs0(着陆构型的失速速度)和Vs1(特定形态的失速速度)的值相等。
(4)
式中:G为飞机的最大重量,CLmax为最大升力系数,在这里是配平后的最大升力系数。根据ASTM F2245-11 4.4.1适航条例要求:机翼水平失速速度Vs0和Vs1,必须通过飞机处于最大起飞重量和最不利CG(Genter of Gravity)的状态,关闭油门,以获得不超过1 kts/s 的减速率。
爬升运动是飞机在垂直平面内做无侧滑的质点运动,因此在计算爬升性能的爬升率这项指标时,用无侧滑的质点运动学方程和动力学方程。常用的计算方法有辛普生积分方法、数值积分法以及龙格-库塔求解常微分方程。
在ASTM F2245-11 4.4.3 条例中要求:最大起飞重量、全油门、最佳爬升率速度必须超过95 m/min,即1.58 m/s。
飞机定常爬升飞行时的运动方程为
Tky=Q+Gsinθ
(5)
Y=Gcosθ
(6)
式中:Tky为可用拉力;Q为阻力;θ爬升角;Y为横向拉力。
上升率是指飞机以最大的重量和给定的发动机工作状态进行等速直线上升时在单位时间内上升的高度,以Vy表示。
将式(5)中等号两边乘以航迹速度V,即得到:
TkyV=TpfV+GVsinθ
(7)
式中:Tpf为平飞需用拉力,其值与阻力相当,即Tpf=Q,以Vy代替Vsinθ,式(7)可写成:
(8)
式中:ΔT为剩余拉力。
从式(8)可见,上升率与剩余拉力和航迹速度的乘积成正比,最大上升率就是剩余功率最大的点。
由总体参数、气动参数、动力参数、螺旋桨效率、电机和控制器效率等因素,得到了电动飞机的爬升率,如图17所示。

图17 爬升率随速度变化的曲线Fig.17 Curves of climb rate with speed
5 飞机制造与装配
该电动飞机采用了一套较为成熟的工艺体系,以手工铺贴、真空袋压成型、热压罐成型和连接装配作为复合材料工艺制造技术基础。其中板簧为层压板结构,采用热压罐成型。机身蒙皮、机翼蒙皮、尾翼蒙皮等为泡沫板夹层结构,采用真空袋压成型。梁、墙、肋、隔框、座舱、整流罩等为层压结构,局部为碳板夹层结构,采用真空袋压成型。金属零件为自行研制外协加工。图18为飞机制造工艺流程图。
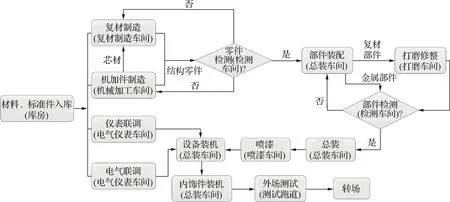
图18 飞机制造工艺流程图Fig.18 Aircraft manufacture process flow diagram
整机使用型架装配,对机翼、机身、尾翼等关键部件进行定位支撑,结合水平测量及激光跟踪三坐标测量设备对装配进行校准,使整机装配达到设计精度要求,将机体与型架固定,对连接部位进行固定或胶接。首次提出利用光栅反射光谱异化法和多级热力循环法监测及控制复合材料制件缺陷和变形的新原理和新方法,大幅度降低了复合材料构件的固化缺陷和变形,保证了轻质、低成本和工艺稳定性。
电动飞机从2012年7月开始按设计图样进行样机制造,共制造整机6架,试验件若干。机制造中的生产图样、工艺文件、制造记录等齐全。审查组按型号合格审定程序(AP-21-AA-2009-25)要求,对用于验证试验的试验件和飞机进行了制造符合性检查,并获得局方制造符合性审查批准。
6 地面和飞行试验
6.1 地面试验
地面试验具体包括飞机系统联调、飞机典型转速系统试验、飞机全任务剖面地面模拟试验、飞机地面刹车试验、飞机电台拉锯测试等内容,试验涉及电动飞机动力系统、航电电气及仪表系统、起落架及刹车系统、飞参记录系统。验证飞机各系统功能是否符合设计要求,为该型号飞机首飞作好保障工作。试验过程中所涉及的设备严格按照质量程序所规定的执行标定,确保所采集数据的有效性。电动飞机适航认证要求的18项地面试验,均在审查方监控和审查下,按要求完成,并达到了设计要求。
根据ASTM F2245-11《轻型运动飞机设计和性能标准》中条款要求,飞机在地面转弯、直线滑行、加速滑跑和减速过程中,稳定性和操纵性良好,刹车系统有效。转弯半径10~11 m。与申请方试飞结果一致。通过地面测试,地面操纵性和稳定性满足适航条例ASTM F2245-11 4.7的要求。
6.2 飞行试验
平飞失速速度符合条款ASTM F2245-11 4.4.1 和4.5.7,详见表3。进行了30.2%正常重心位置的水平失速速度试验。试验时地面风速最大为1.5 m/s,温度7 ℃,飞机起飞重量521.4 kg(ASTM F2245中要求重量允许误差上限增加5%)。飞行数据见表4。

表3 平飞失速速度符合性条款Table 3 Level-fly stall speed compliance clause
图19为电动飞机失速速度的飞行结果,可以看出,失速速度在升降舵偏达到-30°最大上偏后,失速速度不再减小也不再增大,稳定在20.8 m/s 上下振荡。
爬升率是按照最大发动机功率或额定功率进行等速直线上升时在单位时间内上升的高度,其参数是适航取证的一个很重要的关键指标。最大爬升率就是最大剩余功率与重量的比值,爬升率见图20。

表4 正常重心的失速速度Table 4 Clause stall speed at normal center of gravity

图19 飞行试验失速速度Fig.19 Stalling speed of flight test

图20 飞行试验爬升率Fig.20 Climb rate of flight test
图20中的横坐标为时间,纵坐标为爬升高度和飞行速度值,通过处理数据,电动飞机试验验证的爬升率为2.81 m/s。
2014年10月,局方试飞员和申请方试飞员通进行了审定试飞,完成了局方试飞大纲中包括尾旋和不可超越速度在内的20个科目。局方试飞员认为电动飞机的飞行性能、操稳特性、操纵系统、动力系统、仪表配置、通讯设备等满足适航要求,局方审查人员对试飞结果表示认可。
7 结 论
1) 研制了一款用于昼间、简单气象条件,目视飞行的轻型双座电动飞机。
2) 飞机采用复合材料机身、前三点固定式起落架下单翼布局。
3) 研制了一款适合轻型电动飞机的电推进系统。
4) 飞机采用低速高升阻比翼型/机翼设计技术和大展弦比通用飞机全机布局,飞机实际飞行的升阻比大于24。
5) 飞机制造符合性已经通过局方审查。
6) 飞机地面和飞行试验结果得到局方认可,表明飞机性能满足适航标准要求。
该机受锂电池能量密度限制,导致该飞机的有效航时只有60 min。为进一步提升电动飞机航时,占领国内市场,并为拓展和占领国际市场做好技术铺垫,今后的主要研究方向包括:
1) 电池的能量密度、充放电性能和循环寿命的提升。
2) 高升阻比空气动力设计技术需继续挖潜并实现分析的精细化。
3) 低成本的轻质高效复合材料结构需在安全和寿命约束下深化减重优化设计。
4) 进一步提高电推进系统的总体效率。
