气动可伸缩折叠旋转机械手设计
2021-03-26张德福
张德福
(广东技术师范大学天河学院机电工程学院,广州 510540)
0 引言
机械手是工业机器人[1]末端执行器,用来抓取工件,机械手按驱动方式分为液压式、气动式、电动式和机械式,其中气动机械手用空气作为工作介质具有气源方便、动作迅速、造价低、维修方便、无污染等特点,应用广泛,气动机械手的执行机构是气缸和手指,手指抓取动作由控制系统PLC或单片机等编制程序控制。
气动在机器人末端执行器作为动力应用广,根据不同的抓取工件机械手可以分为卡钳式和吸附式,很多人对气动机械手的结构设计做了许多的研究,李小庆[2]设计的三自由度气动机械手结构如图1所示。
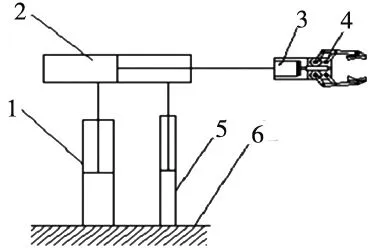
1.垂直升降缸 2.水平移动气缸 3.夹紧气缸 4.机械手部 5.旋转气缸 6.底座
该机械手的工作原理:垂直升降气缸提供机械手的垂直上下移动动力,机械手的伸缩运动依靠水平气缸提供动力;旋转气缸为机械臂机身的回转提供动力。4号部件是机械手的末端执行器,它依靠气缸驱动,将动力传递给手指,从而实现夹紧和松开。该机械手只有一个夹钳式机械手,且只有三个自由度,空间姿态受到限制;没有吸附机械手,只能抓取不能吸附板类工件,结构单一。
陈珂[3]设计的六自由度机械手结构如图2所示。

图2 六自由度机械手结构
该机械手6个关节是串联一起,共有6个电机和6个减速器,这个结构使机械手重量增加,增加其运动惯性和定位误差,不能保证机械手抓取精度,且只能安装一种机械手,占有空间大,不能伸缩折叠。
通过对多例气动机械手结构分析,本文针对现有技术的不足,设计一种气动可伸缩折叠旋转机械手(以下简称机械手),其具有夹钳式和吸盘式两种抓取方式,并且夹钳式和吸盘式机械手可以伸缩折叠,机械手主体旋转角度由角度传感器控制伺服电机旋转实现,机械手主体的旋转与机器人臂部各关节配合实现在空间多角度灵活操作,安装在一台机器人手腕上,可实现对不同形状零件的抓取或吸附,增加机械手抓取零件过程中运动姿态,减少定位误差和装卡抓取误差,减少设备投入,降低成本投入。
1 机械手总体结构及工作原理
1.1 总体结构
如图3所示为气动可伸缩折叠旋转机械手执行部分的总体结构。

1.真空吸盘 2.吸盘拉杆 3.连杆圆柱销 4.夹钳机械手 5.双作用气缸活塞杆连接销 6.双作用气缸 7.气缸固定板 8.气缸推板 9.推板连接销 10.推板气缸 11.吸盘拉杆气缸连接销 12.机械手主体 13.推板气缸连接销 14.气缸推板导向键 15.吸盘拉杆气缸
1.2 工作原理
1.2.1 真空吸盘式机械手的展开吸附和折叠收回
如图4中上图所示,吸盘拉杆气缸活塞杆伸出带动吸盘拉杆由水平位置运动到竖立位置,此时必须保证面A与面B接触良好,保证多个真空吸盘能同时吸附在工件同一个平面上,且吸附力均匀。真空吸盘不使用时吸盘拉杆气缸活塞杆收回带动吸盘拉杆由竖立位置运动到水平位置完成折叠,见图4中下图。

1.真空吸盘 2.吸盘拉杆 3.连杆圆柱销 4.夹钳机械手 5.双作用气缸活塞杆连接销 6.双作用气缸 7.气缸固定板 8.双作用气缸气缸安装板 9.推板连接销 10.推板气缸 11.吸盘拉杆气缸连接销 12.机械手主体 13.推板气缸连接销 14.气缸推板导向键 15.吸盘拉杆气缸 16.吸盘拉杆气缸连接销 17.机械手主体气管通孔 18.角度传感器 19.伺服电机 20.伺服电机固定螺栓 21.传动平键 22机械手主体旋转座 23、24.机械手腕连接盘连接螺栓、螺母 25.机械手腕连接盘 26.限位挡板1 27.限位挡板2
1.2.2 夹钳机械手的伸出和缩回
(1)伸出
推板气缸的活塞杆伸出带动气缸推板沿气缸推板导向键把夹钳机械手与双作用气缸推出机械手主体外,双作用气缸的双活塞杆伸出带动夹钳机械手向两侧移动打开,达到大于被夹持工件的最大尺寸后停止双作用气缸的双活塞杆伸出,然后双活塞杆收回夹持工件。[4]
(2)缩回
不使用夹钳机械手时,先使双作用气缸的双活塞杆收回到原来初始位置,然后再把推板气缸的活塞杆收回带动气缸推板沿气缸推板导向键把夹钳机械手与双作用气缸回收到机械手主体内腔中。
1.2.3 机械手主体的旋转控制
机械手[5]主体上设有角度传感器,伺服电机转轴的旋转通过传动平键带动机械手主体旋转,在这一过程中,角度传感器能感知机械手主体转过的角度模拟量信号传输给控制柜PLC内的输入映像寄存器,经过CPU信号分析处理由输出端子输出数字量信号控制伺服电机的转动,从而控制机械手主体旋转来调整机械手运动姿态完成对物品的吸附、夹持搬运和加工操作。(注:红色部分对传感器信号传送和控制过程更加细化)机械手主体上还设有等间距的分布在角度传感器两侧的限位挡板26、27,同时,限位装置与角度传感器之间的间隔距离,决定了机械手主体随伺服电机轴线转动的角度。工业机器人末端手腕内部及连接盘、主体旋转座内装有伺服电机,伺服电机旋转即带动机械手腕360°旋转,同时带动机械手主体、机械手腕连接盘、机械手主体旋转座一同做360°正转或反转,实现各个不同方位的抓取。机械手主体旋转的极限位置,如图5所示。
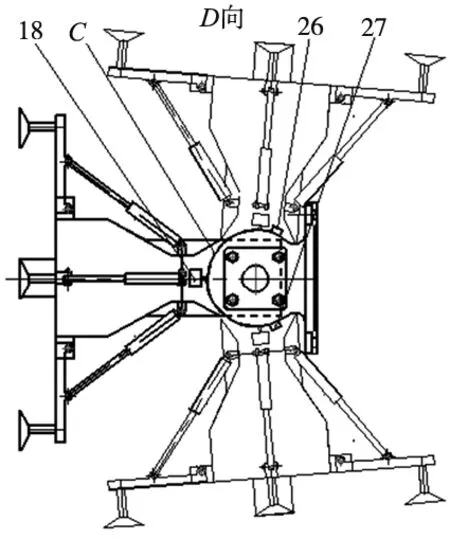
图5 机械手主体旋转极限位置
2 操作系统结构设计
沙智华等[6]研究气动可伸缩折叠旋转机械手的动作过程可以实现几个操作过程的联动也可以单独实现某个动作。现设计夹钳机械手操作过程如下:
(1)真空吸附盘由当前展开位置开始,吸盘拉杆气缸活塞杆收回带动吸盘拉杆由竖立位置运动到水平位置,完成折叠,见图3。
(2)推板气缸的活塞杆伸出带动气缸推板把夹钳机械手与双作用气缸推出机械手主体外,如图6所示。

图6 夹钳机械手伸出位置图
(3)双作用气缸的双活塞杆伸出带动夹钳机械手4向两侧移动打开,达到大于被夹持工件的最大尺寸后停止双作用气缸的双活塞杆伸出,活塞杆收回夹持工件。见图7、图8。

图7 夹钳机械手展开图 图8 夹钳机械手夹紧工件图
(4)机器人手臂移动离开工件工作台,同时伺服电机转轴的旋转带动机械手主体旋转由角度传感器把信号传递给控制系统PLC[7],控制机械手主体的空中运动姿态,机器人末端手腕内部有伺服电机也同时旋转一同控制机械手主体运动姿态,见图9,到达指定位置后,双作用气缸的双活塞杆伸出带动夹钳机械手4向两侧移动打开,松开放下工件。

图9 伺服电机转控制机械手主体运动姿态
回到初始位置继续重复上述操作过程。此时也可以把双作用气缸的双活塞杆收回到原来初始位置,如图1所示,然后再把推板气缸的活塞杆收回收到机械手主体内腔中。再把吸盘拉杆气缸活塞杆伸出带动吸盘拉杆由折叠水平位置运动到竖立位置,使真空吸盘展开吸附其他物体,如板材、平面比较大的物体,实现一机多用的功能。见图10。
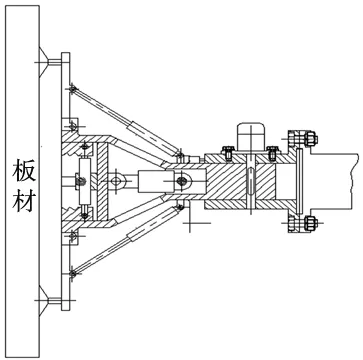
图10 真空吸盘展开吸附板材
3 操作过程程序设计
机械手操作程序主要由系统初始化、上料程序、放料程序等模块组成,实现伸缩机械手和折叠机械手独立运动以及确保各运动间的协调工作。各模块源程序流程图,如图11所示。

图11 机械手动作控制流程图
在系统初始化中,主要完成伸缩机械手和折叠机械手的运动试运动,即:吸盘展开,启动吸盘,关闭吸盘,吸盘收回,夹钳伸出,夹钳打开,夹钳收紧,夹钳关闭。
上料过程中,首先机械手移动并旋转到取料位置,然后选择伸缩机械手或折叠机械手完成取料动作。
放料过程中,首先机械手移动并旋转到放料位置,然后选择伸缩机械手或折叠机械手完成放料动作。
根据生产工艺需要可以随时调整控制过程,重新编程。伸缩折叠旋转式可控式机械手可以根据不同的加工要求来更换不同结构形式的夹钳机械手。例如,焊接工件可以安装焊枪进行焊接操作,调整不同的空间姿态焊接复杂零件。装配操作时可以根据夹持零件的形状和材料的不同更换不同夹钳。 也可以实现夹持工件或夹持打磨工具进行打磨复杂零件表面。
4 总结
通过气动组合伸缩折叠式机械手可以实现用一台机器人完成抓取两种以上的零件,减少工业机器人生产线工业机械手数量;降低成本投入;减少了机械手生产线的占地面积;降低了因多台机械手抓取加工零件变换零件位置造成定位误差,影响加工或装配精度,影响产品质量,效率低;利用角度传感器控制伺服电机和机械手主体旋转角度,实现卡钳机械手和真空吸附机械手在大于半球内抓取、吸附零件。
