基于浸入与不变流形估计器的滑模制导律研究
2021-03-26吴光辉方东洋陈意芬
吴光辉,方东洋,陈意芬,李 瑞,邵 翔
(上海机电工程研究所,上海 201109)
0 引 言
随着空中目标机动性能的不断提高,如何提高防空武器系统的命中精度是一个值得关注的问题。比例导引律(proportional navigation law,PN)结构简单,工程适用性好,得到了广泛的应用。但是随着目标机动性能不断提高,比例导引末端需用过载增大,难以取得好的制导性能。因此,在比例导引的基础上,大量的先进控制方法得到了应用。
滑模变结构理论由于其结构简单、鲁棒性好,已被应用于制导律设计。孙胜等在考虑自动驾驶仪存在较大滞后的情况下设计了一种滑模制导律,对滑模变结构制导律中的开关项系数进行了研究,为了避免系统抖动,开关项系数一般取较小的值。董霓等和赵春明等采用卡尔曼滤波理论对目标的视线角速率和加速度信息进行估计,设计滑模变结构制导律对目标进行拦截。李鹏程设计了带落角约束的有限时间收敛滑模制导律,将目标加速度视为系统干扰,将滑模变结构的开关项系数设计为滑模面的函数,在减小抖振的同时保证了较快的收敛速度。合理设计经典滑模变结构制导律中的开关项系数十分重要,开关项系数设计过大容易引起系统抖振,过小则会导致系统的命中精度降低。为了合理设计开关项系数,对目标加速度上限的估计方法进行了大量研究,根据目标加速度上限的估计值设计开关项系数的大小。文献[8-9]在自适应估计目标加速度上界的同时,设计了有限时间收敛的滑模制导律来保证收敛速度,并根据Lyapunov函数分析了制导律的有限时间稳定性。
除了设计开关项系数的方案外,文献[10-13]分别采用不同的观测器对目标加速度进行估计并在制导律中进行补偿。文献[10]首先采用高阶滑模微分器从测量得到的视线角中提取视线角速率信息,然后采用高阶滑模干扰观测器对目标加速度进行估计,直接对目标加速度进行补偿,因此设计的滑模制导律中不包含开关项。文献[11-12]采用扩张状态观测器对目标加速度进行估计,并设计了一种有限时间收敛的滑模制导律。文献[13]采用非线性干扰观测器对目标加速度进行估计,同时也设计了一种有限时间收敛的滑模制导律。
本文采用浸入与不变流形(immersion and invariance,I&I)估计理论对目标加速度进行估计和补偿,由于导弹和目标的相对运动方程存在非线性关系,因此引入反步法对通道间的非线性耦合项进行补偿,并根据有限时间收敛理论设计了一种有限时间收敛制导律。I&I 估计理论由Astolfi等提出,并被应用到非线性控制器设计和自适应估计器设计中。I&I估计理论的基本思想是将系统动态浸入到期望动态,然后设计不变流形,使得估计状态最终收敛到不变流形中。相比于自适应控制方法,浸入与不变流形估计理论的推导不基于等价原则,在估计系统参数时显示出更好的过渡过程。
1 弹目相对运动模型
导弹与目标的相对运动关系如图1所示。
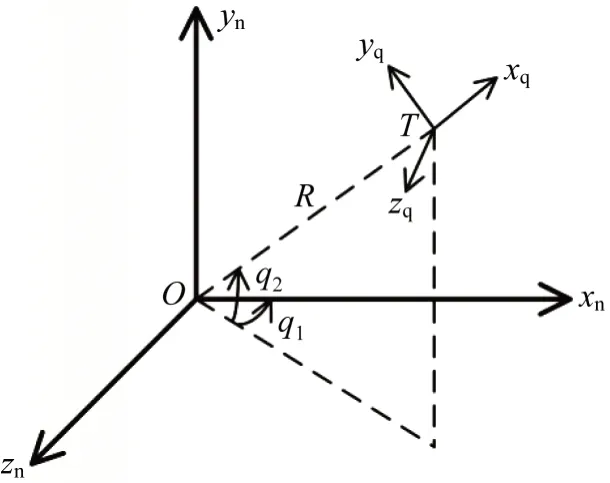
图1 导弹与目标相对运动关系示意图Fig.1 Relative motion relation of the missile and the target
在导航坐标系Ox
y
z
下,先后绕Oy
轴和Oz
轴旋转视线方位角q
和视线高低角q
,得到视线坐标系Tx
y
z
。O
与导弹质心重合,T
与目标质心重合,R
为导弹和目标的相对距离。导弹和目标的相对速度为V
,导弹加速度在视线系的投影为a
=[a
,a
,a
],目标加速度在视线系的投影为a
=[a
,a
,a
]。视线坐标系相对于导航坐标系的转动角速度在视线系的投影为Ω
=[ω
,ω
,ω
],视线系角速度与欧拉角速度之间的关系为
导弹和目标的相对速度为

V
,利用矢量绝对导数和相对导数的关系可得
式中,上标q表示在视线系的投影。对式(3)进行展开可以得到相对运动方程为
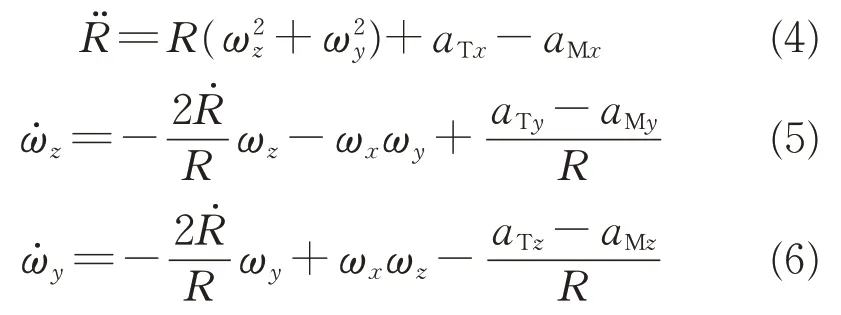
从式(5)~(6)中可以看出,俯仰通道和偏航通道存在运动学的交叉耦合,应用反步法对通道间的非线性耦合项进行补偿。
2 有限时间收敛理论
Bhat 和Bernstein提出了有限时间稳定理论,并根据Lyapunov 稳定性理论给出了满足有限时间稳定条件的基本定理。
定理1:假设有连续正定函数V
:D
→R
存在正常数a
>0 和b
∈(0,1),且存在原点的开邻域W
⊆D
,满足式(7)。
满足式(7)的原点是有限时间稳定的,且调节时间满足

x
为系统的初始状态,满足式(8)的系统为有限时间稳定系统。由于三维相对运动方程比较复杂,以纵向平面相对运动方程为例,对基于反步法的有限时间收敛制导律进行介绍。取x
=ω
为状态量,u
=a
为控制量,假设目标静止,可得
根据有限时间收敛定理1,可得式(9)所示制导系统有限时间稳定的充分条件如定理2所示。
定理2:考虑式(9),如果控制量u
使得
p
为正常数;p
∈(0,1)为常数;视线角速率x
在有限时间收敛到零。选取正定Lyapunov函数为

根据式(9),求导可得

根据有限时间收敛定理1,视线角速率具有有限时间稳定性。
针对式(9)所示制导系统,根据反步法可以设计有限时间收敛导引律为

k
为正常数。视线角速度误差方程为
由定理2可知,式(14)具有有限时间稳定性。
3 浸入与不变流形估计器设计
考虑目标的加速度运动,则式(9)可转换为

定义目标加速度的估计量

ξ
为自适应参数;η
为待设计的非线性函数。定义不变流形为
不变流形外估计误差为

估计误差方程为
设计更新律为

得到误差方程为

设计非线性函数的偏导数为

ε
>0 为小的正常数,保证增益不为零;Γ
>0 为更新律增益。设计非线性函数为

x
(0)为状态量的初值。经过变换,由误差方程(21)可得
经过Laplace变换,可以得到一阶传递函数为

Γ
等效为一阶传递函数截止频率,因此可以从截止频率的含义设计更新律增益Γ
,使得目标加速度估计具有良好的动态特性。

即加速度估计误差满足渐进稳定条件。
4 制导律设计
对有限时间稳定理论和浸入与不变流形估计器进行介绍时,采用的是纵向平面模型。本章针对三维制导方程(5)~(6)进行滑模制导律设计。
对侧向通道进行设计


ω
为视线方位角速度的初值。设计侧向通道的非线性函数为
ω
的误差方程为
对俯仰通道进行设计,可得


ω
为视线高低角速度的初值。设计侧向通道的非线性函数为
ω
的误差方程为
根据误差方程(26)和(30),设计Lyapunov函数

对Lyapunov函数进行求导,可得
5 数值仿真验证
通过数值仿真,对比本文所提的基于浸入与不变流形估计器的滑模制导律(immersion and invariance sliding mode guidance law,IISMG)、比例导引律(proportional navigation law,PN)、带开关项的滑模制导律(sliding mode guidance law,SMG)下的脱靶量。
比例导引律如式(37)所示。

N
=3。带开关项的滑模制导律如式(38)所示。
N
与比例导引系数取值相同;开关项系数ε
=20;滑模项系数p
和p
与本文所提出的制导律参数取值相同。
表1给出了不同制导律下的脱靶量仿真结果。
表1 不同制导律脱靶量Tab. 1 Miss distances of different guidance laws
由表1可以看出,在目标常值机动和正弦机动时,IISMG 制导律的脱靶量均小于PN 制导律和SMG 制导律的脱靶量。当目标进行常值机动时,比例导引律下的脱靶量较大,为12.3 m;SMG 和IISMG 下的脱靶量很小,分别为0.04 m 和0.03 m。由于SMG 中开关项系数取为20,与目标加速度的数值比较接近,因此目标常值机动时命中精度也较高。当目标进行正弦机动时,PN 下的脱靶量较大,为6.5 m;当目标进行正弦机动时,目标加速度的上限值实时变化,此时带有常值开关项的SMG 脱靶量为2.4 m;IISMG 制导律在目标正弦机动时,依然具有较好的命中精度,为0.2 m。
图2~7 分别给出了目标正弦机动情况下的仿真曲线。
图2 视线高低角速度ωz响应曲线Fig.2 Response curve of line of sight angular rates in elevation
从图2和图3中可以看出,PN 导引律和SMG 制导律下视线角速度有不断发散的趋势,IISMG 制导律下视线角速度收敛效果最好,由于考虑了驾驶仪动态响应过程,虽然在末端有发散趋势,但是对脱靶量影响不大。从图4和图5中可以看出,相比于SMG 和IISMG 制导律,PN 制导律在交汇前需用过载最大。IISMG 制导律补偿了目标加速度,因此在交汇前需用过载较小;但是在制导开始时刻,需用过载较大。图6和图7给出了浸入与不变流形估计器对目标加速度的估计值,可以看出,估计值与真值跟随效果较好,表明估计器动态特性良好,工作有效。
图3 视线方位角速度ωy响应曲线Fig.3 Response curve of line of sight angular rates in azimuth
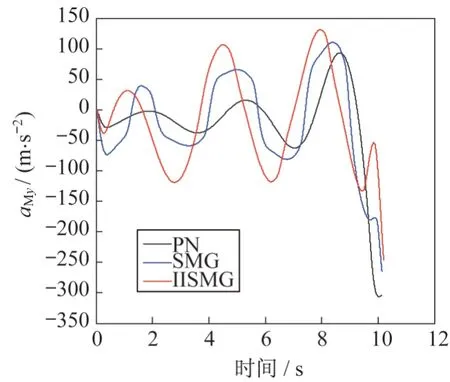
图4 导弹法向加速度aMy响应曲线Fig.4 Response curve of missile acceleration in normal
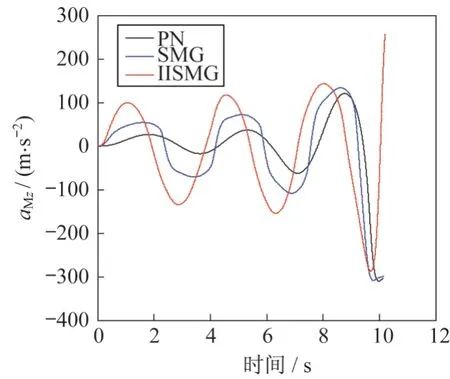
图5 导弹侧向加速度aMz响应曲线Fig.5 Response curve of missile acceleration in lateral

图6 目标法向加速度估计值响应曲线Fig.6 Response curve of estimate of target acceleration in normal
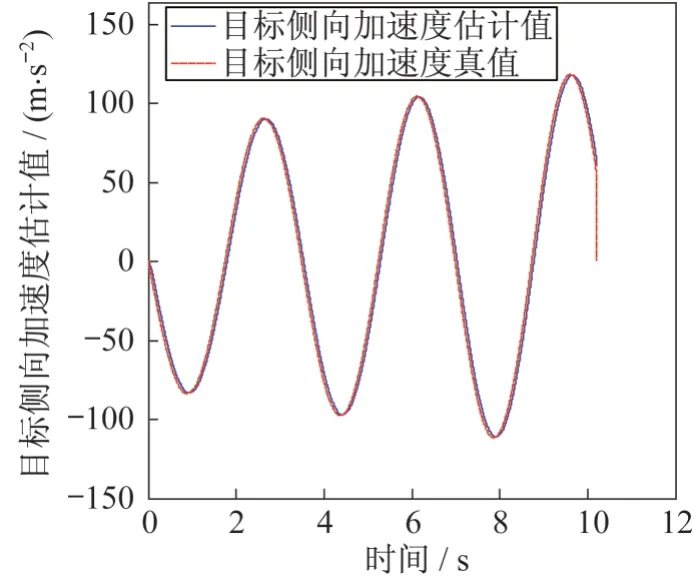
图7 目标侧向加速度估计值响应曲线Fig.7 Response curve of estimate of target acceleration in lateral
6 结束语
本文提出的IISMG 制导律对目标常值机动和正弦机动都具有较好的命中精度。应用浸入与不变流形估计器对目标加速度进行估计,其中,估计器可以等效为一阶传递函数,表现出良好的动态特性。在考虑目标机动、通道间的交叉耦合以及驾驶仪模型情况下,与比例导引和带开关项的滑模制导律相比,所提出的IISMG 制导律的命中精度最好,最大需用过载最小。本文所提出的IISMG 制导律基于视线角速度精确可测量的情况,在后续工作中,可以考虑从导引头测量信息中提取视线角速度信息,根据提取的视线角速度进行仿真,进一步考察所提出方法的有效性以及工程适应性。
