基于伪谱法的无人机集群飞行路径规划
2021-03-26陈建伟
李 征,陈建伟,彭 博
(北京宇航系统工程研究所,北京 100076)
0 引 言
无人机集群路径规划是实现无人机协同飞行的关键技术之一,也是当前的研究热点之一。无人机集群路径规划充分考虑无人机的飞行能力、环境条件、任务目标,可为无人机集群规划最优的飞行路径,为后续的无人机集群飞行奠定基础。
针对无人机集群路径规划问题,国内外学者进行了广泛的研究,目前主要有两类方法:一类是基于几何路线图的方法;一类是基于最优控制的方法。
基于几何路线图的方法主要有Dijkstra 算法、Bellman Ford 算法、A算法、群智能算法等。文献[1]提出了一种A定长航迹搜索算法,首次将A算法应用于多无人机协同路径规划中,能够满足多机同时出发、同时到达的路径规划需求,但是A*算法对约束条件的处理能力有限,也不能满足多样化的优化目标,因此肖自兵等对A*算法进行了改进,进一步提高了其计算效率;文献[3]分析对比了遗传算法、蚁群算法、粒子群算法在路径规划问题中的应用效果,并将改进粒子群算法应用到油田巡井中,可以有效规避障碍物;文献[4]提出了一种基于Veronoi 图环境改进的蚁群算法,采用基于区间距离的协同准则,实现了多架无人机的协同路径规划。
以伪谱法和序列凸优化为代表的最优控制方法是求解路径规划的有效方法,它基于运动物体的动力学方程,将路径优化问题转化为非线性规划问题。最优控制方法实现集群路径规划的优点有:①全局规划,能找出满足全局最优的解;②将数架飞行器纳入到一个模型中,统一协调,可实现多种飞行目的;③更加有效地处理各种约束,如全程飞行时间约束、速度约束、高度约束、禁飞区约束、控制量约束等,也可指定飞临某一区域,优化得到的飞行路径更加符合无人机的飞行要求。随着计算机技术的进步,伪谱法和凸优化得到了迅猛的发展,在飞行器路径规划问题中得到了广泛的应用。文献[5]研究了基于伪谱法的高马赫数飞行器三维再入路径规划问题,能够有效处理飞行过程中的各种约束;文献[6]将伪谱法应用到对地攻击武器的路径规划中,有效提高了路径规划的求解速度;文献[7]将序列凸优化方法应用到再入滑翔飞行器的路径规划中,有效提高了路径规划的求解速度;文献[8-9]将序列凸优方法化应用到无人机面对障碍时的轨迹规划中,能够在较短的时间内完成轨迹规划。目前伪谱法和序列凸优化在单架飞行器路径规划方面应用较多,在多架飞行器协同路径规划方面应用较少,相关研究大多是针对无人机集结任务,对无人机按照指定队形飞行的问题研究较少。本文研究固定翼无人机集群的路径优化问题,建立了无人机飞行动力学模型,结合无人机飞行过程中的状态约束、路径约束、控制量约束和性能指标,将多无人机路径规划问题转化为最优控制问题,然后使用伪谱法对最优控制问题进行求解,得到无人机集群集结阶段和编队飞行阶段的最优飞行路径。
1 无人机集群路径规划问题建模
1.1 无人机集群飞行的运动学模型
无人机飞行过程中受力复杂,包括发动机推力、气动力、重力等。本文主要研究无人机编队的路径规划问题,为了降低问题的求解规模,不考虑无人机复杂的受力过程和姿态运动过程,对动力学方程进行简化,将无人机看作三维空间中运动的质点。以某一地面控制中心为原点,建立地面坐标系,x
轴指向正东方向,y
轴指向正北方向,z
轴垂直于地面向上,无人机集群的运动方程如式(1)所示。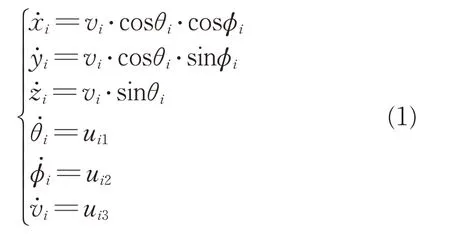
i
∈{1,2,3,…,M
}为无人机在编队中的序号;x
、y
、z
为第i
架无人机在三维空间中的位置;θ
和φ
为第i
架无人机的速度倾角和速度偏角;v
为第i
架无人机的飞行速度;[u
,u
,u
]为无人机控制量。1.2 约束条件
1.2.1 飞行状态约束
1)过程状态约束
飞行状态约束主要指无人机集群飞行过程中各架无人机的状态量所受的约束,可以描述为
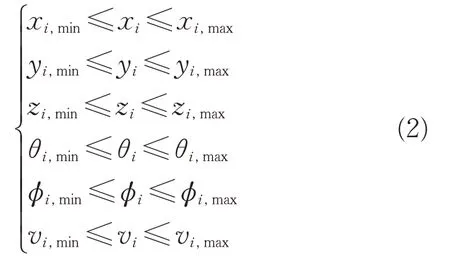
x
、x
、y
、y
等为第i
架无人机的飞行状态约束。2)终端状态约束
针对无人机集群飞行过程,若要求终端时刻一致,则整个飞行过程的时间约束为

t
为第i
架无人机的终端时刻。无人机集群的终端状态约束由飞行任务决定,可以描述为
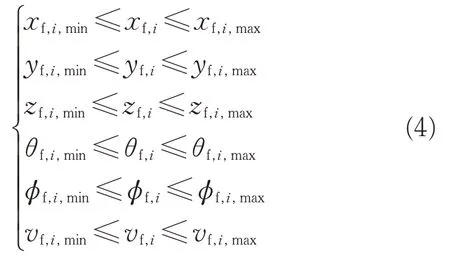
x
、x
、y
、y
等为第i
架无人机的终端状态约束。1.2.2 飞行路径约束
本文研究无人机集群飞行过程,包括无人机集群集结和编队飞行2个过程。无人机在飞行过程中面临的路径约束主要有2 类,分别为无人机对禁飞区的规避以及无人机编队队形的保持和避碰。
1)无人机集群集结
无人机集群集结是指集群中的各架无人机从不同地点出发,飞行至某一固定区域集结,以便开展下一步行动的过程。在无人机集群集结过程中面临的约束主要有对禁飞区的规避和无人机之间的避碰。
禁飞区指无人机不能从其上方或内部经过的区域,为便于处理,本文中的禁飞区分为圆柱形禁飞区和半球形禁飞区。圆柱形禁飞区不考虑禁飞区的高度约束,认为禁飞区是无限高的圆柱形区域,可以描述为

x
,y
)为圆柱形禁飞区的中心轴线坐标;R
为圆柱形禁飞区半径。半球形禁飞区为球心在地面的半球形,可以描述为

x
,y
,0)为半球形禁飞区的球心坐标;R
为半球形禁飞区半径。为了避免无人机之间的相互碰撞,需要每架无人机之间都保持一定的安全距离,可以描述为

R
为无人机之间的安全距离;(x
,y
,z
)和(x
,y
,z
)为任意两架无人机的位置。2)无人机集群编队飞行
三维空间中无人机自主编队队形可分解为水平队形和竖直队形2种二维队形,如图1~2所示。
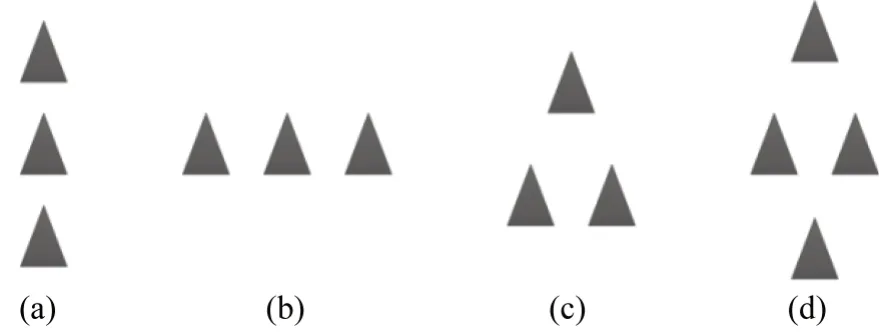
图1 无人机水平队形Fig.1 Plane formation of UAV
为了描述无人机的编队队形,在编队中,选取一架无人机为长机,以其质心为原点,建立长机坐标系o
-x
y
z
,o
x
轴在水平面内指向长机飞行方向,o
z
轴垂直水平面向上,o
y
轴通过右手定则来确定。在无人机集群编队飞行过程中,为了保持上述编队形式,各架无人机之间的横向距离和纵向距离均应保持在一定范围内,在长机坐标系内可以描述为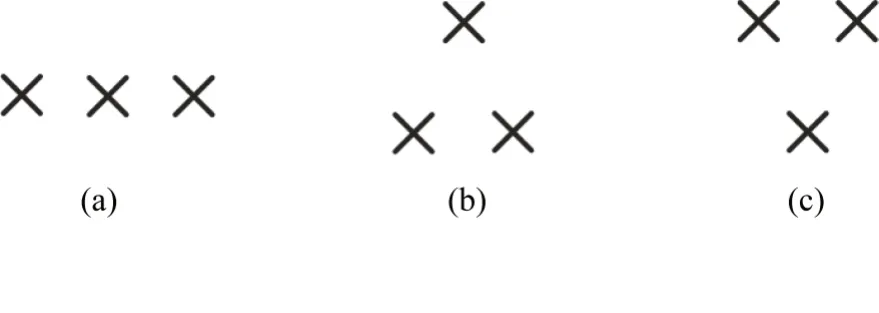
图2 无人机竖直队形Fig.2 Vertical formation of UAV
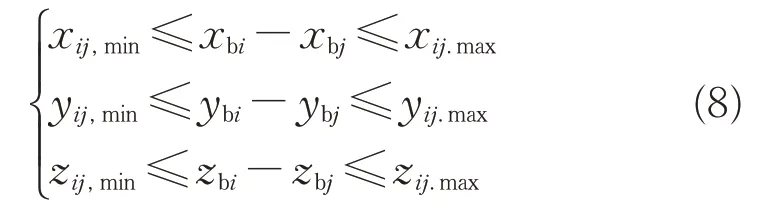
x
,y
,z
)、(x
,y
,z
)为长机坐标系内任意2架无人机的距离范围;(x
,y
,z
),(x
,y
,z
)为长机坐标系内任意2架无人机的位置。1.2.3 控制量约束
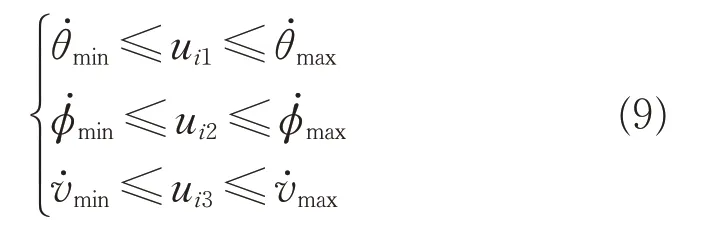
在实际飞行过程中,受限于无人机的控制能力,无人机的飞行控制量(如法向加速度、速度倾角变化率和方向角变化率)不能超过指定值,可表示为
1.3 性能指标
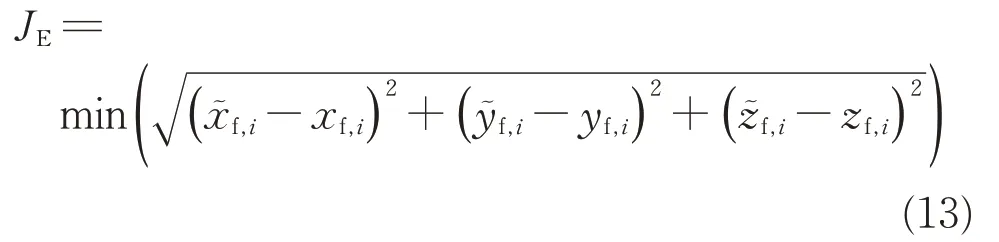
根据无人机集群飞行任务的不同,路径规划能够选择的性能指标也不同,当路径终端状态确定时,可取飞行时间最短、飞行轨迹最短、能量消耗最小、终端误差最小为性能指标要求。
飞行时间最短:

飞行轨迹最短:

能量消耗最小:

终端误差最小:
2 路径规划算法
2.1 最优控制问题模型
路径规划问题本质上属于最优控制问题,在时间区间[t
,t
]内,通过寻找控制变量u
(t
),最小化性能指标J
,得到一条或一类满足约束条件和性能指标的飞行轨迹。在优化过程中,必须满足如式(14)所示的动力学方程约束。
终端约束为

过程约束为

性能指标为

h
、h
分别为过程约束的下界和上界;Ψ
为初始状态和终端状态决定的性能指标;G
为飞行过程决定的性能指标。针对本文研究的路径规划问题,建立了系统的状态方程即飞行器动力学方程,并对此最优控制问题的约束条件、控制量和性能指标进行了完善。本文使用伪谱法对最优控制问题进行求解,对无人机集群集结和编队飞行2个阶段的路径进行优化。
2.2 路径规划算法流程
1)时域变换
将原路径规划问题的时间区间[t
,t
]转换为伪谱法可以求解的时间区间[-1,1],即
τ
为归一化后的时间。2)计算勒让德-高斯-拉道(Legendre-Gauss-Radau,LGR)配点
Radau 伪谱法中,配点为K
阶LGR 点,它们是K
阶多项式P
(τ
)+P
(τ
)的根,其中: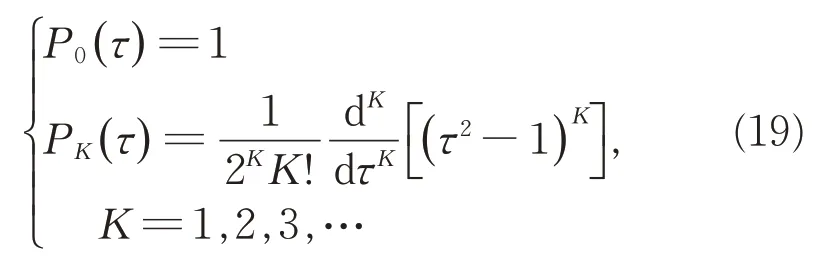
N
=K
+1,节点区间为[-1,1]。3)对状态变量和控制变量进行离散
根据上文确定的离散节点,选取N
个N
阶Lagrange 插值多项式L
(τ)(i
=0,1,2,…,N
-1)为基函数对状态变量进行近似,可得
N
-1)阶Lagrange插值多项式L
~(τ)(
i
=1,2,…,N
-1)为基函数对控制变量进行近似,可得
X
(τ
)为离散后的状态变量;U
(τ
)为离散后的控制变量。Lagrange插值多项式可根据式(22)确定,为

4)约束转化
对通过Lagrange 插值多项式得到的近似状态变量求导,可得到近似状态变量的导数,即
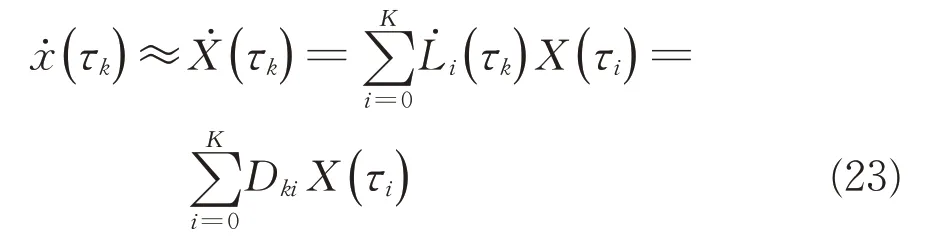
k
=1,2,3,…,K
;微分矩阵D
∈R由式(24)确定。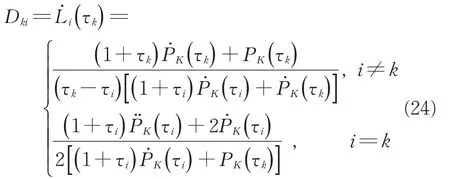
将状态变量及其近似导数代入式(1)可将动力学方程转化为代数方程,即
通过式(25),便将动力学约束转化为了代数方程约束,除此之外,还要对终端状态约束与过程约束进行处理。首先可以根据飞行器的初始状态,通过高斯积分对终端状态进行转化,可得
过程约束可以转化为

通过以上步骤,路径规划问题便转化为非线性规划问题,可通过序列二次规划方法进行求解。
3 仿真算例
针对无人机集群飞行的2 种典型任务,即无人机集群集结任务和编队飞行任务,进行仿真试验,从而验证伪谱法在无人机集群路径规划应用中的有效性。伪谱法路径规划基于GPOPS-II工具包实现。
1)集群集结任务仿真
集群集结任务仿真想定:3 架无人机分别从各自指定区域起飞,在指定时刻到达集结区域,并形成如图2(c)所示的一架无人机高空领航队形。各架无人机的初始状态和终端状态如表1所示。
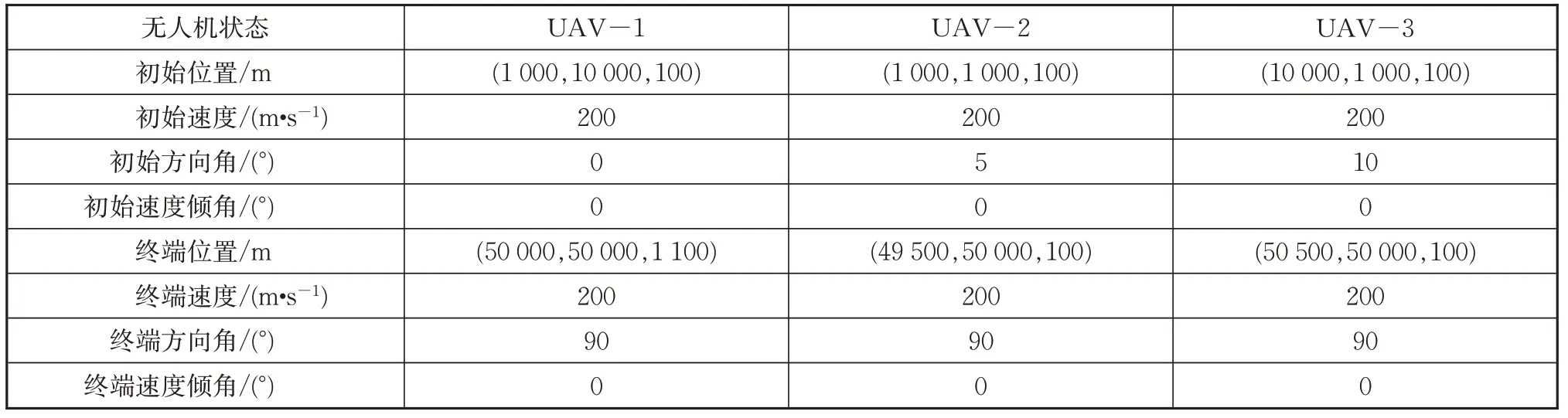
表1 无人机初始状态和终端状态(集群集结任务)Tab.1 Initial state and terminal state of UAV(cluster assembly mission)
集群集结任务中考虑的主要约束条件如表2所示。
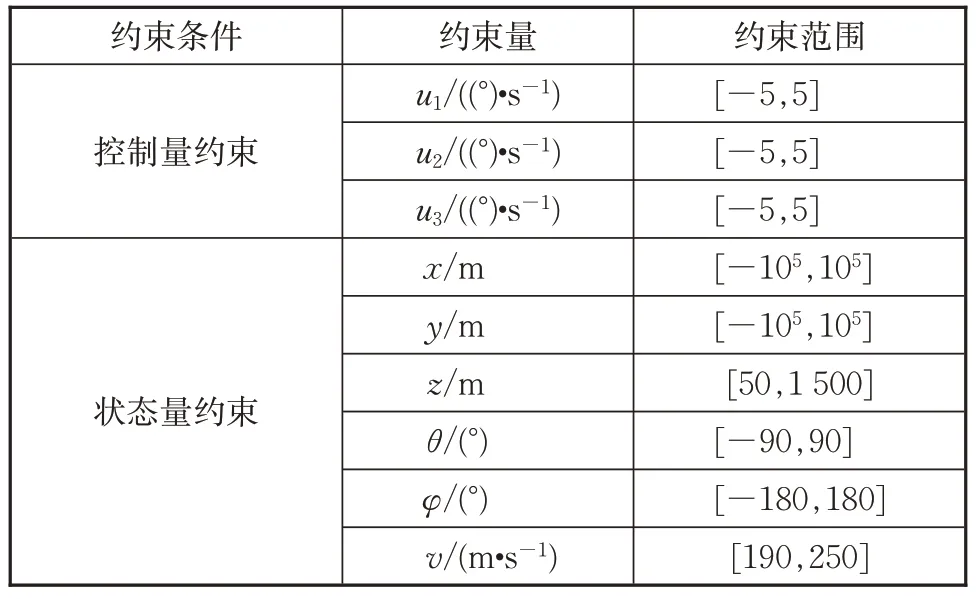
表2 集群集结任务中的约束条件Tab.2 Constraint conditions in cluster assembly mission
在集结任务中设置12个圆柱形禁飞区,禁飞区中心点坐标及半径如表3所示。
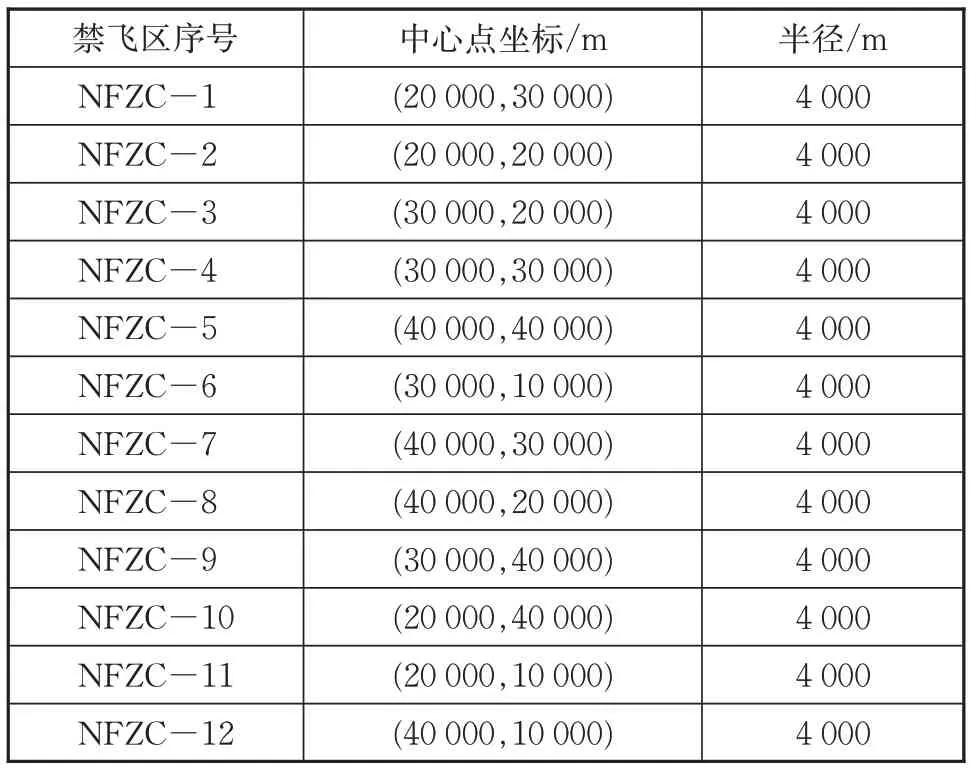
表3 禁飞区位置与半径(集群集结任务)Tab.3 No-fly zone location and radius(cluster assembly mission)
设置集结完成时间为320 s,优化目标为所需能量消耗最小,得到规划路径如图3~4 所示,飞行过程中的各控制量与状态量如图5所示。
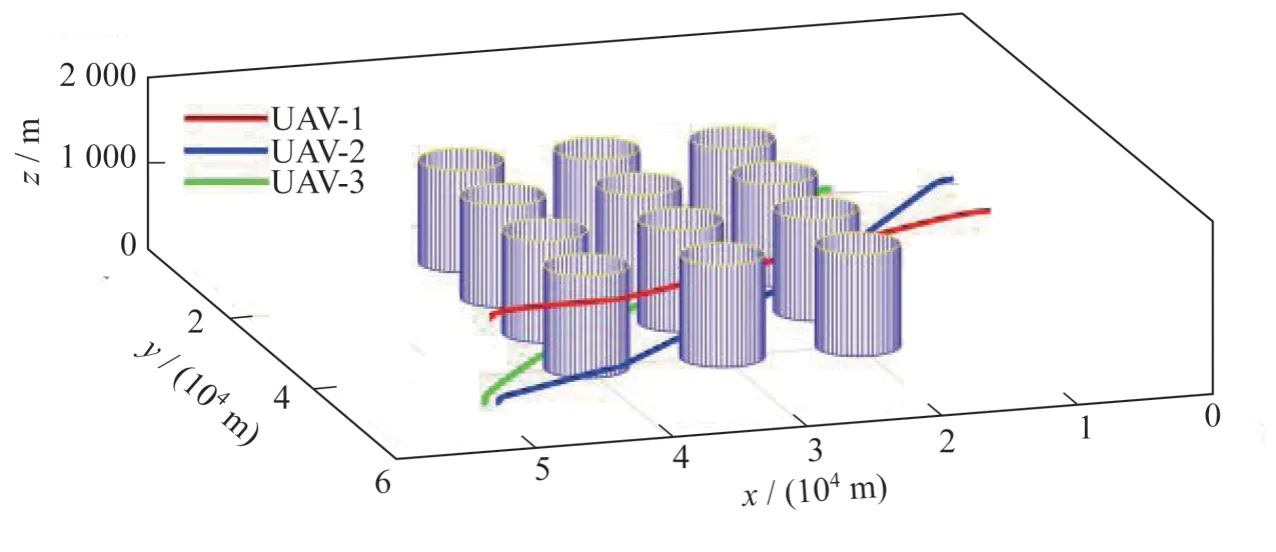
图3 集群集结任务中无人机三维路径Fig.3 Three-dimensional trajectory of UAV in cluster assembly mission
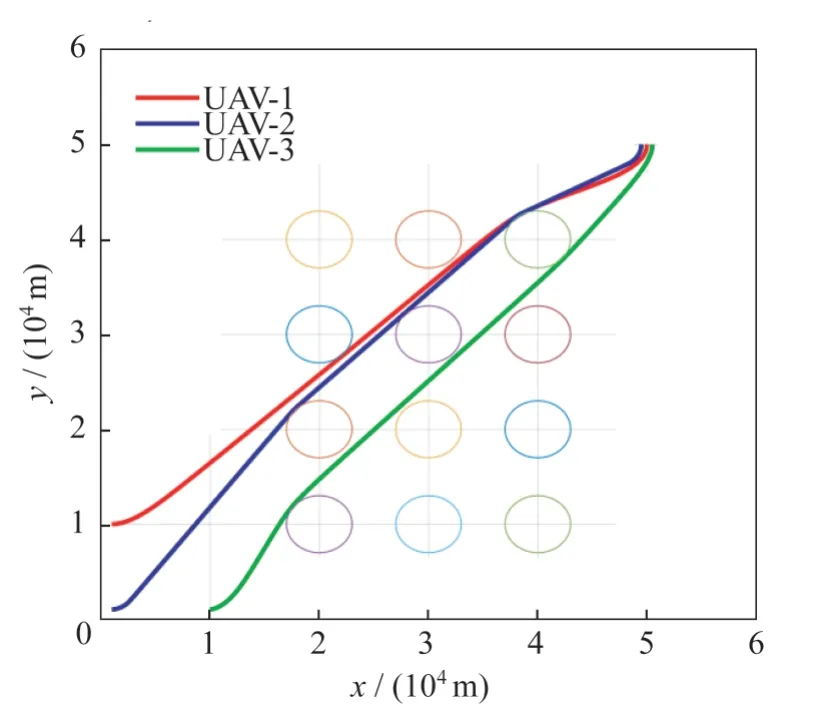
图4 集群集结任务中无人机二维路径Fig.4 Two-dimensional trajectory of UAV in cluster assembly mission
仿真结果显示,3 架无人机成功到达目标点,位置误差小于6 m,速度倾角误差小于0.2°,方向角误差小于0.3°。从图3~4 可以看出,3 架无人机成功避开了12个禁飞区到达指定位置并组成了1架无人机高空领航队形,包括规避禁飞区状态在内;3 架无人机的转弯幅度均较小,有利于节省能量消耗。为了同时到达集结区域,距离较远的UAV-2 提高了飞行速度,距离较近的UAV-1 和UAV-3 按照最低允许飞行速度飞行,最终3 架无人机同时到达了集结区域。如图5所示,控制量和状态量均满足过程约束,证明了伪谱法在无人机集群集结任务路径规划中的有效性。
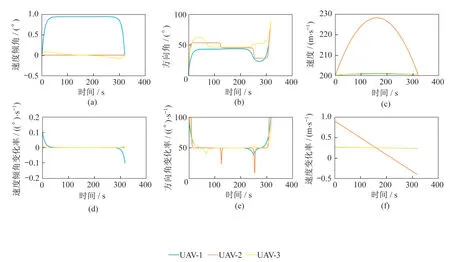
图5 飞行过程中的控制量与状态量(集群集结任务)Fig.5 Controlled quantity and state quantity during flight(cluster assembly mission)
2)编队飞行任务仿真
编队飞行任务仿真想定:3 架无人机完成集结后,组成1 架无人机高空领航和2 架无人机低空飞行的队形,在编队飞行任务中,无人机维持此队形不变,通过包含多个半球形禁飞区的区域,到达目标点。
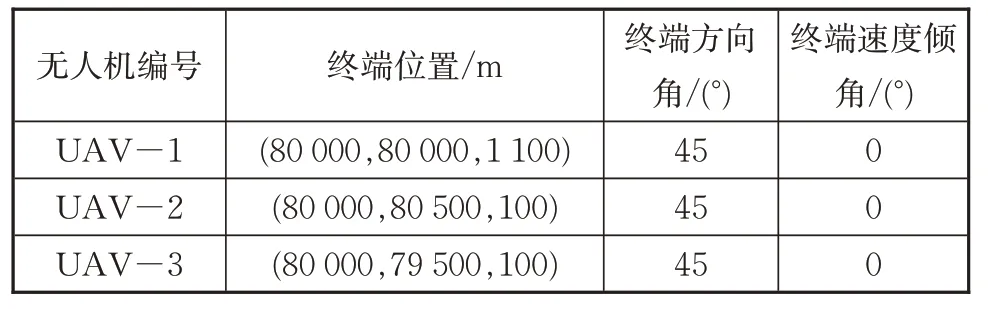
表4 无人机终端状态约束(编队飞行任务)Tab.4 Terminal state constraint of UAV(formation flight mission)
编队飞行任务考虑的约束条件与集群集结任务中考虑的约束条件一致,如表2所示,在编队飞行任务中设置8 个半球形禁飞区,禁飞区中心点坐标及半径如表5所示。
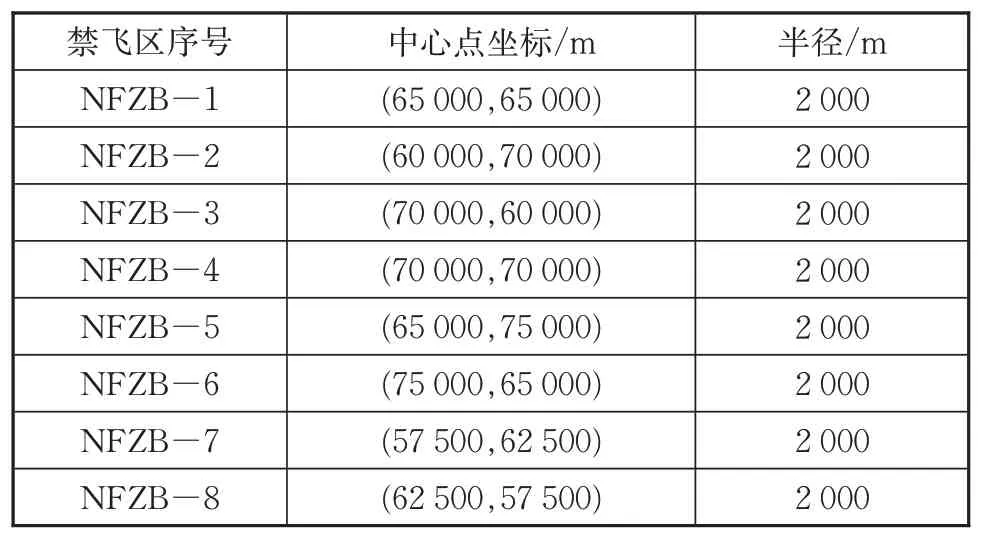
表5 禁飞区位置与半径(编队飞行任务)Tab.5 No-fly zone location and radius(formation flight mission)
编队飞行段优化目标设置为飞行时间最短,得到规划路径如图6~7 所示,飞行过程中的各控制量与状态量如图8所示。
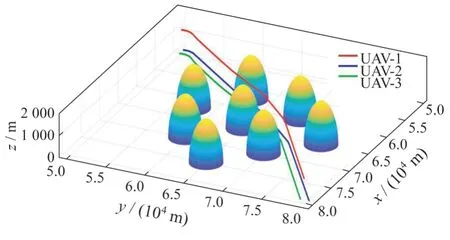
图6 编队飞行任务中无人机三维路径Fig.6 Three-dimensional trajectory of UAV in formation flight mission
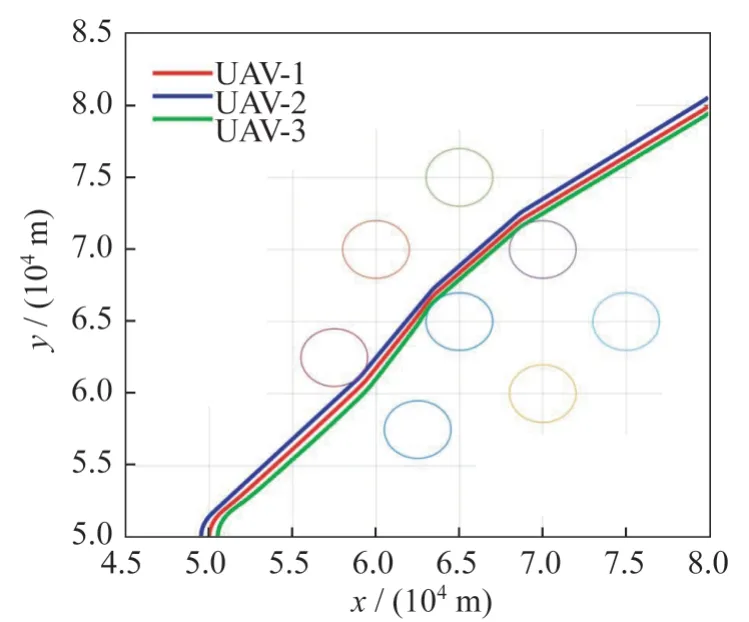
图7 编队飞行任务中无人机二维路径Fig.7 Two-dimensional trajectory of UAV in formation flight mission
仿真结果显示,3 架无人机成功到达目标点,位置误差小于11 m,速度倾角误差小于0.5°,方向角误差小于0.7°。从图6~7 可以看出,3 架无人机按照1 架无人机高空领航、2 架无人机低空飞行的队形,成功避开8个半球形禁飞区到达指定位置。在保证避开禁飞区的同时,3 架无人机的飞行路径较为平直,有利于节省飞行时间。如图8所示,飞行过程中的状态量和控制量均满足约束条件,证明了伪谱法在无人机编队飞行路径规划中的有效性。
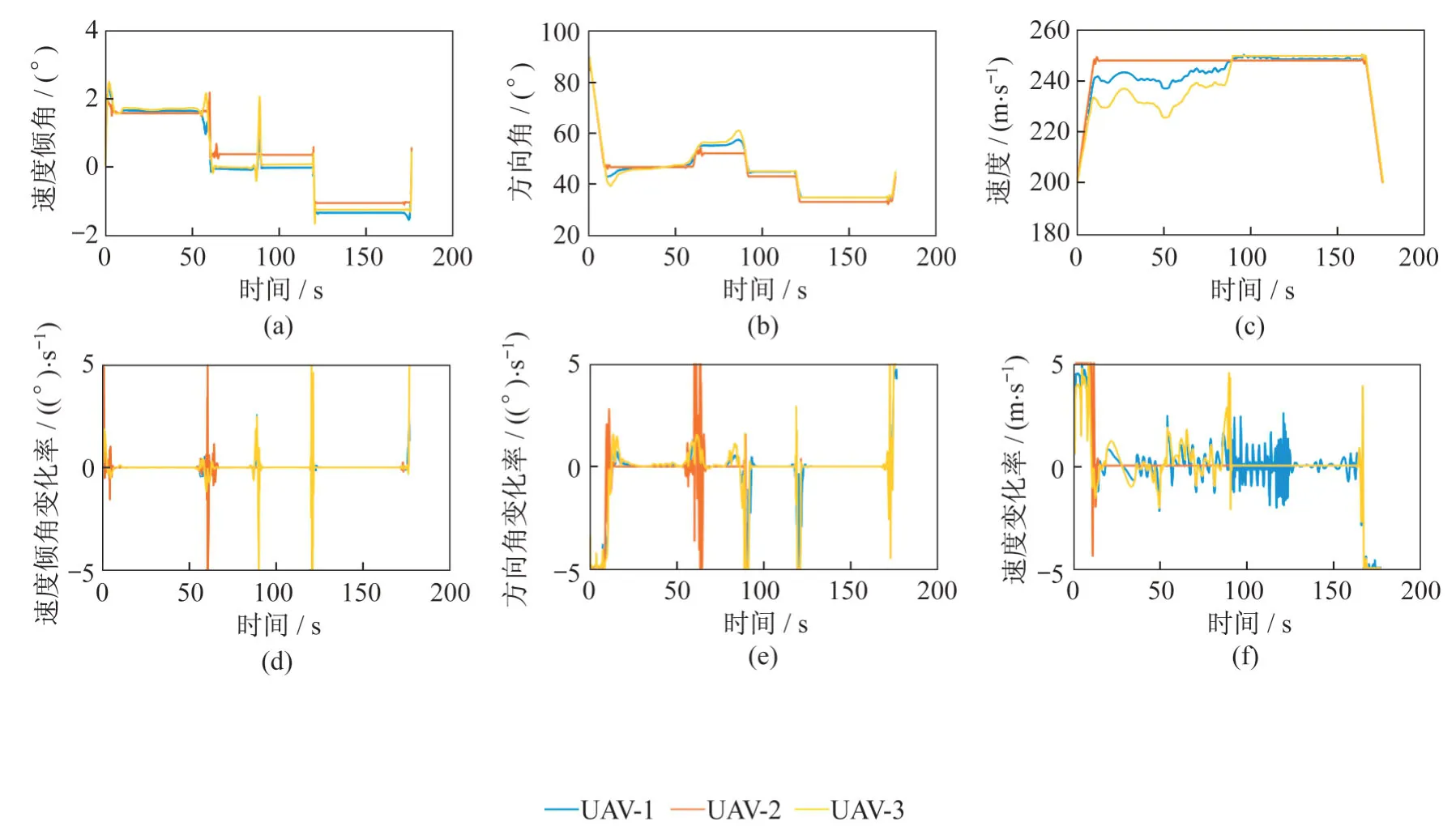
图8 飞行过程中的控制量与状态量(编队飞行任务)Fig.8 Controlled quantity and state quantity(formation flight mission)
4 结束语
本文针对无人机集群协同飞行问题,研究了无人机集群路径规划方法。建立了无人机集群路径规划的最优控制模型,考虑了无人机飞行过程中的状态约束、路径约束、终端约束和控制量约束,并对无人机飞行过程中的集群集结任务和编队飞行任务分别使用伪谱法进行求解。在无人机集群集结任务中,多架无人机分别从不同初始位置出发,可以按照指定时间到达集结区域并形成集结队形,能够有效规避禁飞区且飞行状态量和控制量均满足约束条件,证明了伪谱法在无人机集群集结路径规划中的有效性。在无人机编队飞行任务中,多架无人机能够按照指定队形飞越禁飞区并到达目标点,飞行状态量和控制量均满足约束条件,证明了伪谱法在无人机编队飞行路径规划中的有效性。无人机能够按照优化得到的路径飞行,符合无人机集群协同飞行任务需求。
