全捷联导引头寄生回路稳定裕度分析及校正网络设计*
2021-03-24杨泗智
杨泗智
(西北工业大学航天学院,西安 710072)
0 引言
相对于传统平台式导引头,全捷联导引头用数学平台隔离弹体扰动,并从中提取出视线角速度[1]。全捷联导引头在提取视线角速度的过程中,需要同时利用导引头量测的误差角信息和弹上惯导系统量测的弹体姿态角信息,当探测器与惯性器件输出信息的刻度尺或动力学不一致时,将会使补偿后的视线角存在一定的误差,该误差在制导系统中增加了寄生回路,影响制导系统数学平台的隔离度,同时该寄生回路对全捷联制导系统的稳定性和有效导航比会有显著影响[2-3]。
目前国内外学者在寄生回路对制导控制系统的稳定性和制导精度影响方面的研究已经做了大量工作,如:王嘉鑫等[4]利用李雅普诺夫函数法分析了制导系统的一致渐进稳定条件,研究了隔离度对比例导引制导稳定性的影响。李富贵等[5-6]采用劳斯判据和系数冻结法研究了剩余飞行时间、制导参数、刻度尺偏差对制导稳定性的影响,利用伴随函数法研究了刻度尺偏差对脱靶量的影响。鄢琴涛等建立了引入末制导回路的隔离度寄生回路模型,得出了基于不同末制导剩余时间下的隔离度临界幅值。针对常用误差模型下隔离度正反馈幅值的影响,提出了一种引入制导回路的末制导剩余时间值的计算方法[7]。
综上,在寄生回路分析方面,目前主要集中在制导控制系统的稳定性和制导精度影响方面展开研究,而对于寄生回路本身的稳定裕度分析以及其校正控制方面未见相关研究。
本文在频域内分析了刻度尺误差和动力学延时对寄生回路稳定性的影响,利用幅相裕度确定寄生回路的刻度尺误差和动力学延时允许的变化范围,在时域内对边界条件进行了验证,同时分析了刻度尺误差对有效导航比的影响。当寄生回路的参数不能满足稳定性要求时,利用超前校正网络进行补偿设计,通过校正网络保证寄生回路的稳定裕度,在满足稳定裕度的基础上,通过调整增益补偿寄生回路和校正网络参数对有效导航比的影响,使其满足制导系统稳定性和比例导引系统的要求。
1 寄生回路模型分析

图1 全捷连导引头制导控制回路
其中,Vc为弹目接近速度,tgo为剩余飞行时间,Tf为滤波器时间常数,N 为导航比,Tm为弹体震荡周期,μm为弹体运动阻尼系数,Ta为攻角时间常数。由于探测器的光电测量装置的速度非常快,其动力学滞后可以忽略,同时探测器的输出与视线角成线性关系,因此,在制导回路中可以不考虑捷联探测器的动力学延时,可以令Gs(s)=1。而对角速率陀螺要考虑动力学延时的影响,同时由于探测器和角速率陀螺在测量过程中存在刻度尺误差,造成数学平台不能够完全补偿弹体扰动,从而构成寄生回路。在不考虑噪声的情况下,综合弹体扰动和角速率陀螺补偿及探测器的传递函数,对制导控制回路进行简化得到寄生回路的模型如图2 所示。

图2 寄生回路结构图
由于1-Gg(s)的传递函数主要由陀螺与探测器的刻度尺误差和动力学延时构成,可以令
为了对寄生回路的稳定性进行分析,这里主要在频域内研究,在频域内当由n 个环节串联时,可以得到开环传递函数为:

其中,对数的复频特性为:
对于全捷连导引头采用角速率陀螺进行反馈,捷联导引头探测器的传递函数用Gs(s)表示,角速率反馈系统的传递函数用Gg(s)表示,采用比例导引控制的全捷联制导控制系统的原理如图1 所示。
对数的相频特性为:

2 寄生回路稳定性分析
寄生回路的开环传递函数为:

开环传递函数的幅值函数和相位函数分别为:

由式(7)和式(8)可以看出:在弹体动力学和导航比参数确定的情况下,寄生回路的稳定性及其裕度主要由刻度尺误差Kp和动力学延时决定,并且相互独立。
制导控制参数的取值如表1 所示:
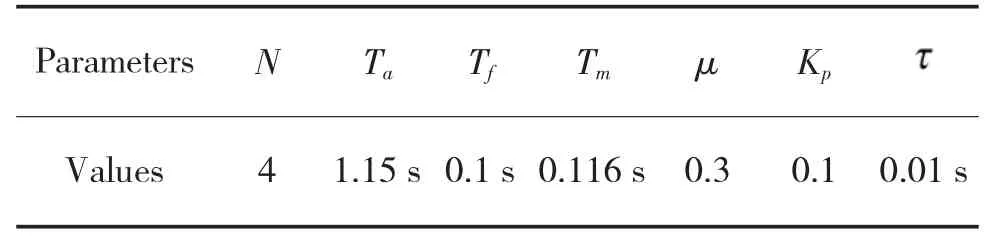
表1 寄生回路参数取值
在频域内利用bode 图可以得到寄生回路开环系统的幅值和相位随频率的变化曲线如图3 所示。可以看出寄生回路是稳定的,其中剪切频率为ωCR=19 rad/s,穿越频率ωg=37.8 rad/s,幅值裕度:Gm=12.4 dB,相角裕度:φm=33.2°。
2.1 频域内寄生回路的稳定性分析
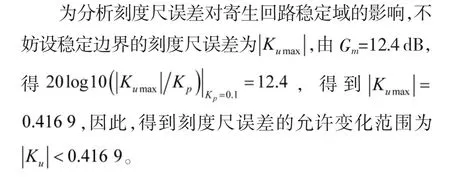
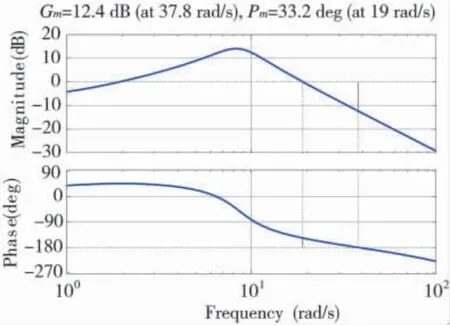
图3 寄生回路开环传递函数的bode 图

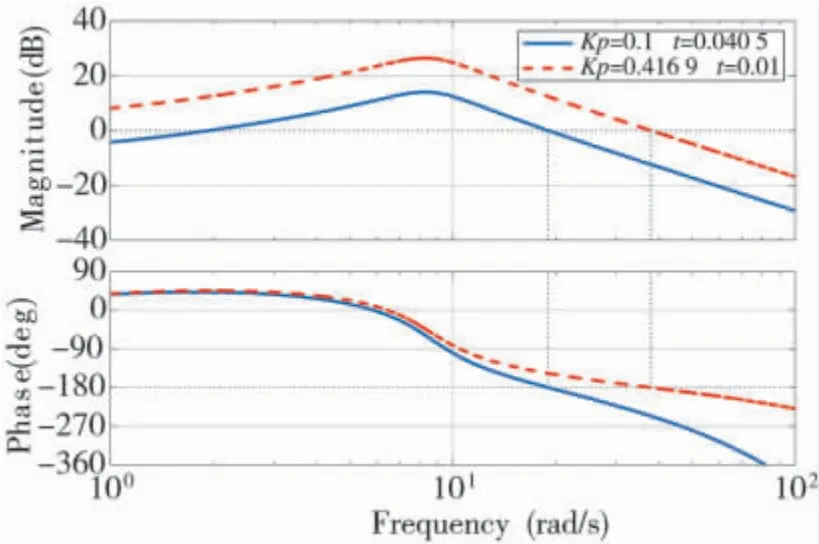
图4 刻度尺误差和动力学延时边界状态的bode 图
由图4 可以看出,刻度尺误差和动力学延时处于边界时寄生回路处于临界稳定状态。
2.2 时域内寄生回路稳定边界的验证
当刻度尺误差和动力学延时处于边界状态时,在时域内对寄生回路闭环系统进行仿真,可以得到阶跃响应曲线如图5 所示:

图5 边界状态的单位阶跃响应函数
由图5 可以看出,当刻度尺误差或动力学延时处于临界稳定边界时,单位阶跃响应也处于临界稳定状态,验证了刻度尺误差和系统延时临界值的正确性,同时也可以看出刻度尺误差同时影响制导控制回路的稳态误差。
3 寄生回路对有效导航比的影响
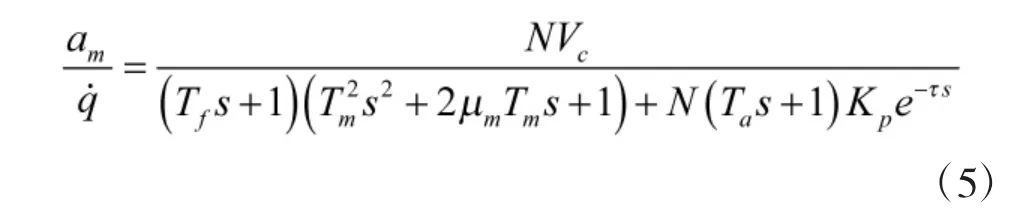
为了分析寄生回路对导航比的影响,对寄生回路引起的制导控制系统的稳态特性进行分析,得到控制过载与视线角变化率的传递函数如下:
由式(11)可知:对于负反馈时有效导航比小于比例导引系数,正反馈时有效导航比大于比例导引系数,刻度尺误差对导航比有影响,因此,在选择导航比的时候要考虑刻度尺误差的影响,在控制系统设计时需要对其进行补偿。
4 增加超前校正网络+增益控制
为了补偿寄生回路对制导控制系统的影响,这里采用超前校正网络+增益控制。增加校正网络+增益控制后的制导控制回路如图6 所示:

图6 增加校正网络+增益控制的制导控制回路
其中,超前校正网络传递函数为:

α 称为分度系数,T 为时间常数,根据超前校正网络的性质可以得到最大超前角频率为:

最大超前角为:

为使有效导航比与比例导引系数一致,需要进行增益调节。根据式(10)可知,增加校正网络和增益控制后的系统稳态值为:

为分析方便这里按照幅值裕度:Gm≥10 dB,相角裕度:φm≥30°对两种稳定边界值进行设计。
1)当Kp=0.416 9,=0.01 s 时,其中剪切频率为ωCR=37.8 rad/s,为了满足幅值和相位裕度的要求,令φm≥35°,根据式(14)算得α=3.690 4。令ωm=ωCR,由式(13)算得:T=0.013 8 s,令Kc=1,校正剪切频率为ωCR=24.5 rad/s,幅值裕度为13.9 dB,相角裕度为52.3°,通过超前校正网络补偿满足稳定裕度要求。增加校正网络前后的伯德图变化如图7 所示:

图7 校正网络补偿刻度尺误差的伯德图
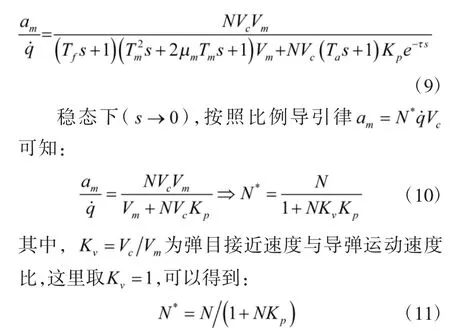
同时,由式(15)得到增益值:K=5.358,寄生回路在校正网络+增益控制和无补偿控制及与无寄生回路影响的比例导引控制,在单位阶跃响应条件下的对比如图8 所示:
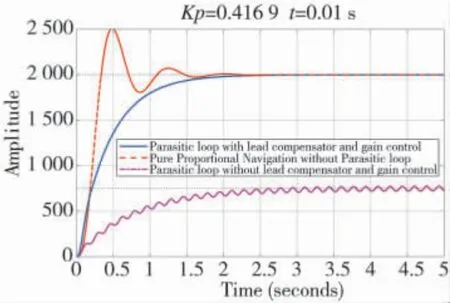
图8 刻度尺误差条件下校正网络+增益控制与其他状态的对比
图8 可以看出通过增加校正网络+ 增益控制可以满足稳定度要求,同时有效导航比与比例导引控制一致,可以消除寄生回路刻度尺误差对制导控制系统的影响。
2)当Kp=0.1,=0.040 5 s 时,根据前面的分析取α=3.690 4,由穿越频率ωg=19 rad/s,令ωm=ωg,可以得到T=0.027 4s,令Kc=1,校正后穿越频率为ωg=10.901 8 rad/s,相角裕度为86.99°,幅值裕度为14.6 dB,满足稳定裕度要求,增加校正网络前后的伯德图变化如图9 所示。

图9 动力学延时补偿校正网络伯德图
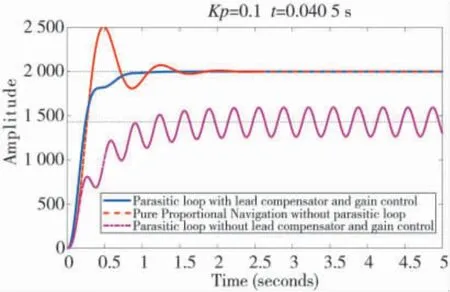
图10 动力学延时条件下校正网络+增益控制与其他状态的对比
同样由式(15)得到增益值:K=4.090 4,寄生回路在校正网络+增益控制和无补偿控制及与无寄生回路影响的比例导引控制在单位阶跃响应条件下的对比如图10 所示。
图10 可以看出,通过增加校正网络+增益控制满足稳定度,要求同时有效导航比与比例导引控制一致,可以消除寄生回路动力学延时对制导控制系统的影响。
对于刻度尺误差和动力学延时同时超出临界值的不稳定状态采用同样的处理可以进行校正,从而将寄生回路引起不稳定系统校正为稳定系统,同时通过增益控制满足比例导引系统有效导航比的要求。
5 结论
本文通过对捷联导引头制导控制回路的模型分析,建立了寄生回路的数学模型及其简化形式,在频域内利用幅值和相角裕度计算出寄生回路的刻度尺误差和动力学延时允许的变化范围,在时域内对边界条件进行了验证,验证了边界条件即为寄生回路的临界稳定状态。分析了刻度尺误差对有效导航比的影响,得到在稳态条件下负反馈有效导航比小于比例导引系数,正反馈有效导航比大于比例导引系数。当寄生回路的参数不能够满足稳定裕度要求时,利用超前校正网络+增益控制进行补偿设计,通过校正网络设计保证寄生回路的稳定裕度,同时通过增益控制补偿寄生回路开环增益对有效导航比的影响,使其满足制导系统稳定裕度和比例导引系统的要求。