自然驾驶工况下驾驶人脚操纵行为规律
2021-03-17黄秋菊冯树民
黄秋菊,冯树民,张 宇,赵 琥
(1.哈尔滨工业大学 交通科学与工程学院, 哈尔滨 150090; 2.哈尔滨职业技术学院 汽车学院, 哈尔滨 150081)
车辆行驶过程中,驾驶人为获得期望速度并保证安全舒适行驶,需要不断完成转向盘操纵、转向开关操纵、灯光开关操纵、空调或音响等控制面板操纵、换挡操纵、加速踏板操纵、制动踏板操纵等操纵行为. 其中加速踏板和制动踏板操纵等脚操纵行为直接决定车辆的速度和加速度,与安全行驶密切相关,因此有必要对驾驶人脚操纵行为规律进行研究. 同时也是进行基于驾驶操纵行为识别的车辆主动安全系统研究和智能汽车技术研究的基础.
早期驾驶人操纵行为特性的研究是利用自动控制理论建立自动控制器并采用转向盘转角、加速和制动踏板行程来反映驾驶员的驾驶操纵行为[1]. 并没有从人类运动控制行为、生理学角度出发分析驾驶人操纵动作的特点和规律. 文献[2-5]等引入反映驾驶人生理特性的肌电分析法,建立了基于简单神经肌肉力学特性的驾驶员转向操纵模型. 文献[6-8]也提出利用驾驶人的肌电数据描述转向操纵行为效率的方法. 文献[9]证实了驾驶员的心率增长率HRI与操纵转向盘时的转速之间存在很强的正相关,特别是驾驶人在超车时其HRI随转向盘转速增加更为敏感. 文献[10]采集仿真和实车试验两种情况下驾驶人心率进行比较,研究表明与心率相关的指标最能描述驾驶人驾驶操纵过程的精神状态. 这些研究主要是从某一项生理指标的角度对操纵行为展开研究. 事实上,驾驶人的每一个操纵行为,首先是由大脑接收信号,然后通过神经系统和神经元支配和控制身体的肌肉和骨骼配合从而共同完成的,因此是多项生理机能共同作用的结果. 而仅从某一项生理指标的角度来反映驾驶操纵行为还不够完整和具体,有必要从多项生理指标角度对驾驶操纵行为进行研究.
目前研究驾驶人操纵行为的研究方法主要有自然驾驶行为方法、交通事故数据方法、驾驶模拟器试验方法、场地测试方法[11]4种. 文献[12]利用驾驶模拟器对驾驶人操控动作进行测量试验,研究结果很好地揭示了不同驾驶人操纵动作的差异性. 文献[13-16]也借助驾驶模拟器采集驾驶人的驾驶操纵行为数据,提出了一种个性化驾驶行为模式建模方法,为驾驶安全辅助系统的开发在智能化和个性化方面提供理论依据. 这些研究都基于驾驶模拟器采集数据,虽然具有数据获取及时、事件及行驶轨迹可控等优点[17],但并不能完全真实准确的反映驾驶人在自然驾驶状态下的驾驶操纵行为特征. 交通事故数据方法虽然可获取典型交通事故场景,但得到数据中关于驾驶人操纵行为尤其是脚操纵行为的数据并不多,样本数量和准确性很难满足需要. 场地测试也存在一定的缺陷. 因此,近几年采集自然驾驶状态数据的自然驾驶行为方法被越来越多的应用. 自然驾驶行为研究(NDS)方法是指在没有外界干扰驾驶员行为的条件下采集真实交通环境中自然驾驶状态下驾驶行为的一种研究方法[18],其特点是在自然驾驶状态下采集驾驶行为数据,提取的数据真实准确,因此被越来越多的应用,但数据的采集和实验过程相对复杂. 文献[19-21]等用自然驾驶行为法证实了驾驶人踏板操纵与驾驶负荷之间的相关性. 但研究仅针对山区公路,对城市道路自然驾驶状态下驾驶人脚操纵行为规律的研究尚未开展.
综上所述,采集驾驶人自然驾驶习惯下真实驾驶状态数据,选取与脚操纵行为密切相关的3项主要生理指标,证实加速和制动踏板力与3项生理指标之间的相关性,建立自然驾驶工况下驾驶人脚操纵行为多元回归模型,并对模型准确性进行验证. 同时通过数据统计获得中国城市道路不同交通量、驾驶经验(驾龄)、性别、年龄的驾驶人自然驾驶状态下踏板踩踏频率的一般规律特征,并对其进行定性的风险分析. 旨在从两个维度揭示中国城市道路驾驶人脚操纵行为一般规律,用于基于驾驶操控行为的驾驶辅助系统研发、模拟驾驶人操控行为和规律的自动驾驶技术研究、基于驾驶人操控规律的智能汽车技术设计和开发等.
1 试 验
1.1 试验道路和车辆选择
为获取不同交通环境下驾驶人自然驾驶试验数据,试验路段选取哈尔滨市44.2 km城市道路,全程线路为:黄河路—文昌街—教化街—安发桥—松花江公路大桥—松北大道—中原大道—松浦大桥—南十四道街—宣化街—黄河路,如图1所示. 考虑被试驾驶人对生理采集装置的适应性,在试验开始的4.2 km路段行驶所采集数据不作为研究使用,剩余路段按每公里1个路段单元进行划分,可获得40个路段单元.
2018年哈尔滨市民用汽车保有量182.6万辆,其中小型客车150.3万辆,占83.3%[22]. 因此试验所选车型为中国小型轿车中保有量最大的大众公司生产的速腾1.8T轿车(图2),车辆为自动挡变速器.

图1 试验路段路线图 图2 试验车型
1.2 被试驾驶人
选择36名身体健康且非职业性驾驶人作为被试,驾驶人实际驾龄为0.25~15 a,平均驾龄为6.5 a. 其中18人驾龄为3 a以下,18人驾龄为3 a以上且年均驾驶里程数超过10 000 km. 驾驶人年龄为22~50岁,平均年龄为37.5岁. 36人中女性12人,男性24人,符合2019年公安部公布的中国现有驾驶人分布情况. 为获得驾驶人自然驾驶状态下真实数据,在试验开始前和试验过程中不对驾驶人提出任何附加任务要求,保证其按平时的驾驶习惯驾驶操纵车辆. 每名被试在自然驾驶状态下沿试验路段连续行驶44.2 km.
1.3 数据采集
使用北京津发科技股份有限公司的可穿戴生理记录系统模块、可穿戴无线动作捕捉模块、可穿戴脑电测量系统模块、HRV心率变异性高级分析模块、可穿戴生物力学测量系统、EMG肌电图高级分析模块、 General基础生理分析模块采集驾驶人自然驾驶状态下实时的脑电、肌电、脉搏、血压、心率等多项生理指标数据,如图3所示.

(a)被试驾驶人 (b)自然驾驶状态 (c)生理指标数据采集系统
同时借助GPS道路环境与车辆数据采集系统(图4)可获得汽车移动时的速度和距离,并且能够测量实验车辆的横向加速度、纵向加速度、加速踏板力、制动踏板力、踏板行程、转弯半径、转向力矩等. 试验过程中,各传感器通过Wi-Fi与插在笔记本电脑的接收器进行连接,传输数据并保存. 每名被试在选定好的交通路线上行驶两次,分别是白天平峰时段、晚高峰时段的城市道路. 所选的道路及时段均可满足3种交通流密度,试验过程中摄像机记录各路段单元交通量. 试验最终获得36名驾驶人1 591 km城市道路共2 340 min自然驾驶状态数据.
1.4 评价指标选取
驾驶人完成一个完整的操纵动作,首先是由大脑接收信号,然后通过神经系统和神经元支配和控制身体的肌肉和骨骼配合来共同完成. 因此,选取驾驶人的脑电(EEG)、心率(H)、肌电(EMG)3个与操纵过程密切相关的参数来研究驾驶人的脚操纵行为特性. 由于车辆在道路上行驶是一个高度动态化的过程,为了更好的反映出驾驶人生理状态的瞬变性和累积性,选用动态的脑电变化率EEGδ、心率变化率Hδ、肌电变化率EMGδ,具体数据的处理方法主要借助MATLAB进行计算和处理. 其计算式分别为
Hδ=(Hmax-H0)/H0,
(1)
EEGδ=(EEGmax-EEG0)/EEG0,
(2)
EMGδ=(EMGmax-EMG0)/EMG0.
(3)
式中:EEGmax为驾驶人在某一路段单元行驶时脑电最大值;EEG0为驾驶人在某一路段单元行驶时脑电平均值;Hmax为驾驶人在某一路段单元行驶时心率最大值;H0为驾驶人在某一路段单元行驶时心率平均值;EMGmax为驾驶人在某一路段单元行驶时肌电最大值;EMG0为驾驶人在某一路段单元行驶时肌电平均值.
2 踏板操纵与驾驶人主要生理指标相关性分析
2.1 踏板力与驾驶人EEGδ、Hδ、EMGδ相关性
驾驶人踏板操纵主要包括加速踏板、制动踏板和离合器踏板,由于自动变速器在车辆上的广泛应用,大多数轿车不再采用离合器踏板. 因此选取踏板操纵中制动踏板力和加速踏板力进行研究. 为了明确踏板力分布特征及其与驾驶人主要生理指标之间的关系,对加速踏板力和制动踏板力数据进行了整理,仅提取每个路段单元中加速踏板力和制动踏板力的曲线最大值. 由于有效试验路段为40 km,按每公里1个路段单元进行划分可获得40个路段单元. 而试验中有36名被试驾驶人,每公里可提取36组踏板力(加速踏板力和制动踏板力各36个)样本值,这样实验路段全程可获得制动踏板力和加速踏板力样本各1 440个.
整理统计踏板力数据,得到图5、6所示制动踏板力和加速踏板力的概率分布直方图. 从图5可知,城市道路中加速踏板力主要集中在20~32 N,其中24 N左右使用频率最高,10 N以下和44 N以上发生概率相对较低. 制动踏板力多集中在26~42 N,最高使用频率为30 N左右,48 N以上发生概率相对较低. 加速和制动踏板力的均值分别为27 N和34 N. 制动踏板力的均值大于加速踏板力,说明在城市道路中,人们更愿意通过制动踏板力实现对车速的控制.

图5 加速踏板力概率统计分布图

图6 制动踏板力概率统计分布图
统计每个路段单元上36名驾驶人的脑电变化率(EEGδ)、心率变化率(Hδ)、肌电变化率(EMGδ),与对应时刻的加速踏板力Fai、制动踏板力Fbi,形成数据点对:
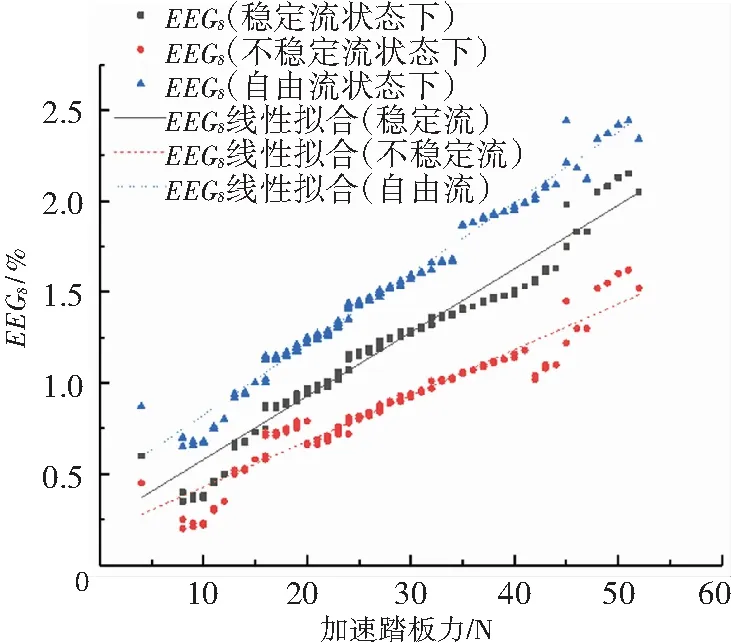
绘制散点图,如图7所示. 采用饱和度[23]对交通流状态进行划分和描述,即自由流状态饱和度为0~0.25,稳定流状态饱和度为0.25~0.53,不稳定流状态饱和度为0.53~0.64,其中饱和度为实际交通量和设计交通量的比值.
从图7可知,驾驶人脑电变化率(EEGδ)、心率变化率(Hδ)、肌电变化率(EMGδ)会随加速踏板力Fai、和制动踏板力Fbi的增加而增加. 这是因为随着加速踏板力的增加,车速会增加,驾驶人注意力会更集中、精神会更紧张、腿部肌肉收缩更明显. 因此驾驶人EEGδ、Hδ和EMGδ会随加速踏板力的增加而表现出增长的趋势. 同样随着制动踏板力逐渐增大,车速逐渐降低趋于制动,此时驾驶人更关注与前车的安全制动距离,避免碰撞,因此EEGδ、Hδ、EMGδ会随制动踏板力的增加而表现出增长的趋势.
由图7可以看出:当交通量较小时(自由流状态),驾驶人的脑电变化率(EEGδ)、心率变化率(Hδ)、肌电变化率(EMGδ)与加速踏板力的拟合曲线斜率均比其与制动踏板力的曲线斜率大. 说明相对制动踏板力而言,EEGδ、Hδ、EMGδ这3项指标随加速踏板力的增加更敏感. 这是因为自由流状态下,驾驶人会不断增加加速踏板力从而获得更高车速,车速越快,驾驶人精神会越紧张、注意力会越集中、腿部肌肉收缩也会越明显. 因此脑电变化率(EEGδ)、心率变化率(Hδ)、肌电变化率(EMGδ)会随加速踏板力的增加变得更加敏感.
同样由图7可知:当交通量较大时(不稳定流状态),驾驶人脑电变化率(EEGδ)、心率变化率(Hδ)、肌电变化率(EMGδ)随制动踏板力的拟合曲线斜率均比其与加速踏板力的曲线斜率大. 说明相对加速踏板力而言,EEGδ、Hδ、EMGδ这3项指标随制动踏板力的增加更敏感. 这是因为交通量较大的情况下,尤其接近饱和流量时,车辆走走停停,驾驶人为了避免相邻车道车辆的强行并入,总是尽可能减小与前车跟驰行驶的距离. 所以习惯于将脚放置于制动踏板上,而不是将挡杆置于P挡进行等候,这样的操纵势必增加驾驶人精神和腿部肌肉的紧张和疲劳程度. 因此交通量较大时在频繁的操纵和紧张的驾驶环境下使得驾驶人EEGδ、Hδ、EMGδ随制动踏板力变得更加敏感.
2.2 多元回归模型
为更好地消除驾驶人的个体差异,对每个被测路段单元的不同被测试驾驶人的脑电变化率(EEGδ)、心率变化率(Hδ)、肌电变化率(EMGδ)和踏板力(加速踏板力和制动踏板力)数据取算术平均值,即每个路段单元对应1组生理数据和1组踏板力平均值,再绘制散点图,可知相关性变得更强. 进行多元线性回归分析,其线性表达式为
Fa=-15.42x1-5.878x2+49.116x3-8.721,R2=0.943,
(4)
Fb=-9.838x1+6.032x2-11.348x3+27.792,R2=0.983.
(5)
式中:x1=EEGδ,x2=Hδ,x3=EMGδ,Fa为加速踏板力,Fb为制动踏板力.
(a)加速踏板力Fai与脑电EEGδ相关性

(c)加速踏板力Fai与肌电EMGδ相关性

(e)制动踏板力Fbi与心电Hδ相关性

(b)加速踏板力Fai与心电Hδ相关性

(d)制动踏板力Fbi与脑电EEGδ相关性

(f)制动踏板力Fbi与肌电EMGδ相关性
用MATLAB对模型进行参数确定,从运算结果可知,模型回归效果显著(R2=0.943和R2=0.983),对模型进行检验,在残差图中,只有第1个和第11个数据残差离零点较远,可视为异常点. 其他所有数据的残差均距零点很近,并且数据的残差置信区间也均将零点包含在内,这说明回归模型(4)、(5)能较好符合数据.
3 驾驶人踏板踩踏频率特征
3.1 基于交通量的驾驶人踏板踩踏频率特征
由于车辆是具有高度非线性和迟滞性特征的复杂系统,驾驶人为了将车速维持在期望速度附近,需要频繁地踩踏加速和制动踏板,在城市道路中尤其是交通流密度较大路段体现更加明显. 本文设定驾驶人加速或制动踏板力每归零一次计为一次踩踏,驾驶人在单位时间内的踩踏次数为踏板踩踏频率(次/min). 对试验数据整理,取每个路段单元所有被试驾驶人最大踩踏频率的算数平均值(减小个体差异影响),与对应路段交通量形成数据点对,绘制散点图,得到不同交通量下驾驶人踏板踩踏频率统计图,如图8所示.
可见,随着交通量的增加,驾驶人的踏板踩踏频率也随之增加,以城市道路6车道为例,当交通量达到1 200~1 500 veh/h时,踩踏频率增加明显. 这说明在交通量较大的情况下,驾驶人习惯于通过频繁的踏板操纵来调整速度和与周边车辆的距离. 这势必增加驾驶人的疲劳程度,从而增加发生事故的隐患,从风险管理的角度来看,增加了事故的风险.

图8 不同交通量下驾驶人的踏板踩踏频率
3.2 基于驾驶经验(驾龄)的驾驶人踏板踩踏频率特征
对每个驾驶人在全程各个路段单元上的最大踏板踩踏频率取算数平均值(减小交通量的影响),与对应驾龄形成数据点对,得到驾驶经验(驾龄)与驾驶人踏板踩踏频率特征图,如图9所示.

图9驾驶经验与踩踏频率特征图
可见,在不考虑交通量影响的条件下,驾驶经验(驾龄)越长的驾驶人在驾驶过程中的踏板踩踏频率越低,驾驶经验(驾龄)在3~6个月的驾驶人在驾驶过程中的踏板踩踏频率最高. 这说明驾驶经验(驾龄)较短的驾驶人,由于对车辆的操控熟练度及周边环境的感知和判断准确性不足,要通过频繁地加速和制动踏板操纵来进行修正,以达到期望速度和安全车距. 这同样会增加驾驶人的疲劳程度,增加错误操作出现的概率,从而增加发生事故的隐患,从风险管理的角度来看,增加了事故的风险.
3.3 基于驾驶人性别、年龄的踏板踩踏频率特征
用同样的方法,对不同性别和年龄的驾驶人的平均踩踏频率进行统计,得到性别和年龄与驾驶人踏板踩踏频率特征图,如图10所示.

图10 性别和年龄与驾驶人踏板踩踏频率
从图10可知,在不考虑交通量影响的条件下,女性较男性驾驶人在驾驶过程中的踏板踩踏频率高,年龄较高的驾驶人较年轻驾驶人在驾驶过程中踏板踩踏频率低. 其中,30~40岁驾驶人在驾驶过程中的踏板踩踏频率最低,18~25岁驾驶人在驾驶过程中的踏板踩踏频率最高. 这是因为女性驾驶人,驾驶过程中表现较为谨慎,她们更愿意通过频繁的加速和制动踏板操纵来进行调整和修正,确保安全行驶. 而年龄较小的驾驶人在交通参与过程中表现较为活跃,因此在驾驶过程中踩踏频率也较高, 他们在交通量较小时风险较低,在交通量较大时风险会随之增加.
4 结 论
1)通过对自然驾驶数据统计分析,发现制动踏板力的均值高于加速踏板力,对应最高使用频率制动踏板力幅值也是高于加速踏板力. 这说明城市道路驾驶人更愿意通过操纵制动踏板实现对车速的控制.
2)通过对自然驾驶数据统计分析,论证了加速踏板力、制动踏板力与驾驶人脑电变化率(EEGδ)、心率变化率(Hδ)、肌电变化率(EMGδ)3项生理指标的相关性. 利用回归分析建立了基于自然驾驶数据的驾驶人脚操纵行为模型,该模型具有较高拟合精度. 该模型的建立,突破了传统研究对驾驶人单一生理指标进行分析的局限性.
3)统计发现,当交通流量较小时,脑电变化率(EEGδ)、心率变化率(Hδ)、肌电变化率(EMGδ)随加速踏板力的增加比其随制动踏板力增加更为敏感. 但在交通流量较大时,脑电变化率(EEGδ)、心率变化率(Hδ)、肌电变化率(EMGδ)对制动踏板力的增加则更敏感.
4)城市道路驾驶人踏板踩踏频率具有明显特征:驾驶人踏板踩踏频率随交通量的增加而增加,当交通量达到某一临界值时,踩踏频率增加明显. 驾驶经验(驾龄)越长的驾驶人在驾驶过程中的踏板踩踏频率越低,驾驶经验(驾龄)在3~6个月的驾驶人在驾驶过程中的踏板踩踏频率最高. 女性较男性驾驶人在驾驶过程中的踏板踩踏频率高. 年龄较高的驾驶人较年轻驾驶人在驾驶过程中踏板踩踏频率低,30~40岁驾驶人在驾驶过程中的踏板踩踏频率最低,18~25岁驾驶人在驾驶过程中的踏板踩踏频率最高.
